Die einfachste Möglichkeit, Ihr Altimeter zu konfigurieren, ist über die Altimeter Cloud. Falls noch nicht geschehen, können Sie die Altimeter Cloud WiFi-Anleitung verwenden, um Ihr Gerät zu verbinden.
Die Geräteeinstellungsseite finden
![]()
Klicken Sie auf den Reiter „Meine Geräte" oben auf der Altimeter Cloud-Website. Sie sehen eine Liste der Geräte in Ihrem Konto. Klicken Sie auf die Schaltfläche „Einstellungen" für das Gerät, das Sie konfigurieren möchten.
Wenn Sie auf Speichern klicken, werden die Einstellungen an Ihr Altimeter übertragen. Dies dauert normalerweise 1 bis 4 Sekunden, solange Ihr Altimeter eingeschaltet und mit WiFi verbunden ist.
Die Standardeinstellungen sind ein großartiger Ausgangspunkt für die meisten Flüge, daher lassen Sie sich von der Anzahl der verfügbaren Optionen nicht abschrecken. Diese bieten fortgeschrittene Abstimmung und zusätzliche Funktionen, falls Sie diese benötigen. Für die meisten Flüge muss das Mercury nur eingeschaltet werden und es ist einsatzbereit.
Prognostizierter Luftdruck

Der prognostizierte Luftdruck ist der Wettervorhersage-Luftdruck auf Meereshöhe für Ihren Startplatz. Der Standard-Standard ist 1013,25 mBar, was dem atmosphärischen Durchschnitt entspricht. Ihr Altimeter funktioniert gut mit diesem Standard, aber für höchste Genauigkeit sollten Sie den prognostizierten Luftdruck für den Tag und die Zeit eingeben, an dem Sie fliegen. Dies macht einen größeren Unterschied, wenn Sie von hochgelegenen Standorten starten oder an Tagen mit extrem niedrigem oder hohem Luftdruck.
Eine gute Website im Vereinigten Königreich zum Nachschlagen dieser Druckwerte ist xcweather.co.uk.
Startdetektion

Die Einstellung für die Startdetektion teilt dem Altimeter mit, wie hoch es ansteigen muss (Druckhöhe), bevor es die Startdetektion auslöst und mit der Aufzeichnung beginnt. Die Standardeinstellung von 25 Metern ist perfekt für fast alle Gelegenheiten. Die niedrigeren Einstellungen sind für sehr niedrige Höhenflüge gedacht, die möglicherweise 10 bis 20 Meter nicht erreichen, oder zum Testen Ihres Geräts, indem Sie es in die Luft werfen.
Hinweis: Drucksensoren sind lichtempfindlich. Wenn Sie Ihr Altimeter direkt in Ihrem Elektronikschacht montieren oder das Standard-Mercury-Gehäuse nicht verwenden, sollten Sie versuchen, sicherzustellen, dass kein Licht in den Sensor eindringt. Dies erhöht das Rauschen in Ihren Höhenmessungen erheblich.
Hinweis: Das Auseinanderziehen Ihres Kopfes oder Schachtrohrs kann einen Unterdruck verursachen, der die Startdetektion des Altimeters auslösen könnte. Wir haben ein System zum Schutz dagegen, das standardmäßig aktiviert ist. Bitte lesen Sie daher auch mehr über Launch ALP weiter unten auf dieser Seite.
Ihr Altimeter verwendet nicht einen festen Luftdruck von dem Zeitpunkt, an dem das Gerät eingeschaltet wurde, als Referenz für die Höhe des Startplatzes. Stattdessen aktualisiert es ständig einen Durchschnittswert aus etwa 5 bis 10 Sekunden Daten bei 50 Mal pro Sekunde. Dies bedeutet, dass wenn Sie es niedriger oder höher als Ihr Startplatz einschalten oder es eine Weile auf Ihrem Startplatz sitzt, Veränderungen des Luftdrucks nicht die Genauigkeit Ihrer Flugdaten beeinflussen.
Sensorgeschwindigkeit

Das Mercury betreibt seine Sensoren standardmäßig mit 100 Hz. Wir empfehlen, dies standardmäßig beizubehalten. Sie können dies auf 50 Hz reduzieren, wenn Sie möchten, aber es bietet sehr wenige Vorteile außer einigen Prozent mehr Akkulaufzeit.
Abtastverhältnis

Das Mercury läuft mit einer Zyklusrate von 50 Hz oder 100 Hz und nimmt Messwerte von den Sensoren auf und führt Berechnungen durch. Sie können wählen, wie oft diese Abtastungen in das Flugprotokoll protokolliert werden.
Standardmäßig protokolliert das Mercury jeden Zyklus und gibt Ihnen maximale Details. Sie können diese Einstellung verwenden, um stattdessen jedes 1., 2., 3. oder 4. Abtastwert zu protokollieren. Dies ermöglicht es Ihnen, länger innerhalb des Limits von 12.000 Abtastwerten pro Flug aufzuzeichnen.
Hybrid-Modi beginnen mit vollständiger 1:1-Auflösung und wechseln dann zehn Sekunden nach Apogäum zu einem reduzierten Verhältnis. Dies bietet maximale Details während der Antriebs- und Gleitphasen, während die gesamte Aufzeichnungszeit erheblich verlängert wird. Beispielsweise kann der Hybrid-Modus die Aufzeichnung von etwa 4 Minuten auf über 8 Minuten verlängern.
Sie springen auch bei Höhen unter 20 m im Abstieg auf das 1:1-Abtastverhältnis zurück, um die Landung mit voller Geschwindigkeit zu erfassen.
Es ist auch möglich, das Rules-System zu verwenden, um die Protokollierungsrate nach bestimmten Ereignissen oder Zeiten zu ändern. Beispielsweise könnten Sie eine Regel konfigurieren, um das Abtastverhältnis nach dem Apogäum zu reduzieren.
Maximale Abtastungen

Die Einstellung „Maximale Abtastungen" ist die Anzahl der Zeilen in Ihrem Flugprotokoll oder die Abtastanzahl, wenn die Aufzeichnung automatisch beendet wird. Das Maximum beträgt 12.000 Abtastungen pro Flug, aber wenn Sie für eine feste Zeit laufen möchten, können Sie den automatischen Stop deaktivieren und die maximalen Abtastungen wie erforderlich einstellen.
Aufzeichnung beenden

Die Aufzeichnungsstopp-Einstellung bestimmt, wann eine Flugaufzeichnung beendet wird. Die Standardeinstellung „automatisch" (450 Abtastungen stabil) ist perfekt für die große Mehrheit der Flüge.
Der automatische Stopp analysiert die letzten 450 oder 900 Abtastungen und wenn 98 % davon sich in einer kleinen Entfernung zum jüngsten Durchschnitt befinden, wird das Mercury als stillstehend für einen erheblichen Zeitraum angesehen und die Aufzeichnung wird beendet. Es gibt auch einen manuellen Stopp-Modus, bei dem Sie die TASTE (nicht die EINSCHALTTASTE) drücken müssen, um die Aufzeichnung zu beenden.
Nachdem eine Aufzeichnung beendet ist, wird die Statusleuchte ROSA, während die Flugprotokolle im Flash-Speicher gespeichert werden. Nach Abschluss wird das Gerät automatisch ausgeschaltet, also geraten Sie nicht in Panik, wenn Sie zu Ihrer Rakete kommen und Ihr Gerät ausgeschaltet ist – es wurde aufgezeichnet und Sie haben nicht vergessen, es einzuschalten.
Überabtastung

Dies ist die Einstellung für den BMP390-Drucksensor, die ihm mitteilt, wie viele interne Abtastungen er für jede Abtastung durchführen soll, die er ausgibt. Der BMP390 unterstützt bis zu etwa 205 Hz Abtastungen. Sie sollten diese auf die Standard-8X-Einstellung belassen. Der einzige Vorteil, es zu reduzieren, ist ein paar Prozent extra Akkulaufzeit.
Überabtastung ermöglicht dem Drucksensor, seine Präzision zu erhöhen. Jede Steigerung von keiner Überabtastung erhöht die Ausgabgenauigkeit um 1 Bit. Beispielsweise bietet 1x-Überabtastung 16-Bit-Druckauflösung mit etwa 20 cm Höhenauflösung, während 4x-Überabtastung 18-Bit und etwa 5 cm Auflösung bietet.
Spätere Revisionen ab Revision 3 verwenden einen BMP581-Drucksensor, der noch schneller läuft und eine Standard-Überabtastungsrate von 16X hat. Es gibt wirklich nur wenige Gründe, dies zu reduzieren.
IIR-Filter

Der IIR-Filter ist der zweite interne Filter auf dem BMP390- oder BMP581-Drucksensor. IIR steht für Infinite Impulse Response und ist in der Praxis ein effizienter Filter, der mehrere Abtastungen glättet. Dies hilft, plötzliche Spitzen und Rauschen wie Wind, der in den Sensor bläst, zu beseitigen.
Für die meisten Anwendungen möchten Sie dies auf 1, 3 oder 7 einstellen, aber fühlen Sie sich frei zu experimentieren. Wenn zu hoch eingestellt, kann es zu Problemen mit der Genauigkeit bei Spitzenwerten und während schneller Höhenänderungen führen. Hohe Einstellungen verursachen eine leichte Verzögerung bei der Ausgabe, die die tatsächliche Höhe erreicht, können aber großartige Ergebnisse für langsam bewegliche Objekte wie Wetterballons bieten.

Druckfilter (Kalman)

Der Druckfilter ist ein Kalman-Filter, der auf dem Prozessor anstatt auf dem Sensor läuft. Sie können aus 4 Einstellungen wählen: AUS oder drei Filterebenen. Dies ist ein fortschrittlicher Filter, der den realen Druck auf der Grundlage aktueller und historischer Abtastungen schätzt.
Die mittlere Einstellung funktioniert perfekt für die meisten Flüge. Sie können dem Filter mitteilen, dass er mit den anderen Optionen mehr oder weniger filtern soll. Kalman-Filter sind äußerst gut darin, Rauschen aus Sensordaten zu entfernen und eine stark verbesserte und realistischere Höhenbahn zu hinterlassen.
Sperrzeit

Der Sperrfilter erkennt Ereignisse, die den Drucksensor dazu bringen, die falsche Höhe zu lesen. Dies könnte eine Auswurfsladung sein, die Druck im Inneren der Rakete erhöht und den Sensor denken lässt, es hätte einen plötzlichen Höhenabfall gegeben. Eine weitere häufige Ursache ist, wenn Raketen Überschallgeschwindigkeit erreichen, was auch zu Druckstörungen führt.
Diese Einstellung steuert, wie lange sich das Gerät sperren sollte, um Entscheidungen über Ausgaben und andere Berechnungen zu treffen, wenn es eines dieser Ereignisse erkennt. Der Standard von 500 ms funktioniert gut für die meisten Situationen.
Sperrwertänderung

Die Sperrerkennung funktioniert, indem erkannt wird, ob die Höhe so schnell gefallen ist, dass sie diesen Betrag zwischen einer einzelnen Abtastung überschreitet. Obwohl diese Werte klein wirken, denken Sie daran, dass es bei 50 Abtastungen pro Sekunde funktioniert (der Wert wird im 16-Abtastungen-pro-Sekunde-Modus automatisch verdoppelt).
Ein Abfall von 1,5 m zwischen Abtastungen entspricht einem Abfall von 48 Metern pro Sekunde oder etwa 107 mph – was Ihre Rakete unter normalen Betriebsbedingungen nicht in Abwärtsrichtung erreichen sollte.
Sensoren synchronisieren

Verschiedene Sensoren haben verschiedene Filter und dies kann zu einer kleinen Verzögerung in den Daten eines Sensors im Vergleich zu einem anderen führen. Das Ergebnis ist, dass verschiedene Sensoren leicht außer Synchronisierung miteinander sind.
Diese Einstellung aktiviert den Neustart-Algorithmus. Er schaut nach hinten, wenn der Start erkannt wird, um das wahrscheinliche Startereignis in jedem Sensor zu finden. Dann verschiebt er die Daten jedes Sensors im Puffer relativ zum Drucksensor, um sie neu zu synchronisieren. Es wird empfohlen, aktiviert zu bleiben.
IMU-Filter

Der IMU-Filter fusioniert die 6-Achsen-Daten aus Gyroskop und Beschleunigungsmesser, um Winkel wie Pitch, Roll, Yaw und Neigungswinkel von vertikal zu berechnen. Der Madgwick-Filter benötigt etwas mehr Verarbeitungsleistung, ist aber genauer als der Mahony-Filter.
Das Mercury hat keinen Magnetometer für 9-Achsen-Fusion, daher sammeln sich kleine Fehler im Laufe der Zeit an. Nach unseren Tests sind diese sehr klein und der Filter bietet großartige Daten während der Dauer eines Standard-Raketenflugs.
Um die besten Ergebnisse zu erzielen, sollten Sie Ihre Sensoren kalibrieren und Ihr Altimeter in einer der unterstützten Ausrichtungen montieren.
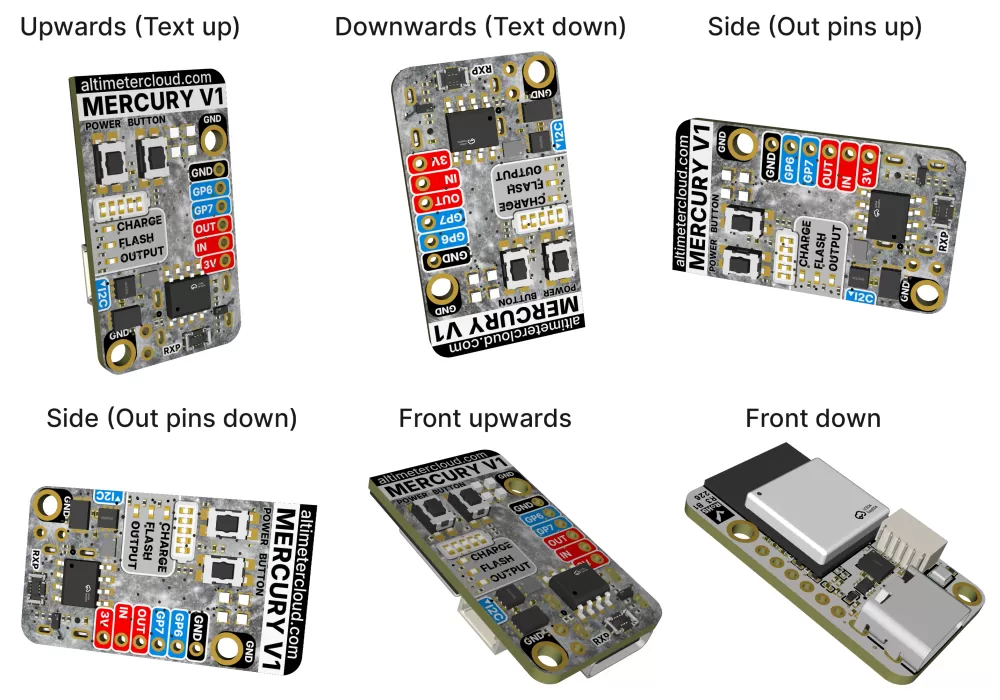
Ausrichtung

Die Ausrichtungseinstellung teilt dem Altimeter mit, auf welche Weise Sie planen, es zu installieren. Obwohl es sich selbst ausrechnen kann, stellt diese Einstellung sicher, dass der IMU-Filter die korrekten Achsendaten in der richtigen Reihenfolge für genaue Winkelberechnungen erhält. Der Standard ist aufrecht mit dem USB-Anschluss nach unten zeigend.
Launch ALP (Akzidentale Startverhinderung)

Diese Einstellung hilft, versehentliche Startdetektion zu verhindern. Ohne ALP verlässt sich das Altimeter allein auf den Drucksensor und die von ihm angezeigte Höhe. Dies bedeutet, dass starke Windstöße oder sogar das Abziehen Ihres Kopfes eine Druckänderung verursachen könnten, die groß genug ist, um die Startdetektion auszulösen.
Mit ALP aktiviert nutzt das Altimeter sowohl den Drucksensor als auch den Beschleunigungsmesser, um den Start zu verifizieren. Um eine Auslösung zu verursachen, muss das Altimeter mindestens 8 Abtastungen in den letzten 3 Sekunden über der eingestellten G-Beschleunigungsstufe sowie die Höhe über der Startschwelle sehen.
Es gibt auch einen Sicherungsauslöser: Sobald das Altimeter die Startschwelle für 1,05 Sekunden überschritten hat, wird die Startdetektion unabhängig ausgelöst. Dies stellt sicher, dass echt langsame Starts immer noch erkannt werden.
Startsperre

Diese Einstellung verhindert, dass das Altimeter unter keinen Umständen einen Start erkennt, bis die angegebene Zeit seit dem Einschalten des Mercury vergangen ist. Beispielsweise, wenn Sie dies auf 180 Sekunden (3 Minuten) einstellen, wartet Ihr Altimeter, bis diese Zeit verstrichlich ist, bevor es nach Startdetektion sucht. Für die meisten Anwendungen ist es am besten, dies auf 0 zu setzen.
Statische Temperatur

Bei der Berechnung der Höhe aus dem Luftdruck verwendet die Gleichung sowohl die Einstellung „Prognostizierter Luftdruck" als auch diese Einstellung der statischen Temperatur. Die Standards sind 1013,25 mBar bzw. 15,0 °C.
Wenn Sie diese auf tatsächliche Werte am Flugtag ändern, erhalten Sie die genauesten Höhenberechnungen.
Temperatursensor

Der an Bord befindliche Temperatursensor wird durch die Wärme des Boards selbst beeinflusst und die Tatsache, dass das Innere Ihrer Rakete wahrscheinlich nicht die externe Temperatur widerspiegelt. Sie können einen unserer winzigen MT1-Temperatursensoren an den I2C-Erweiterungsport an Ihrem Mercury anschließen, um eine viel genauere Messung (0,1 °C Genauigkeit) zu erhalten.
Nachdem er verbunden ist, können Sie wählen, ob Sie die MT1-Temperatur nur in Ihrem Flugprotokoll protokollieren oder sie sowohl protokollieren als auch als statische Temperatur beim Start für Höhenberechnungen verwenden.
Wenn Sie planen, sie als statische Temperatur zu verwenden, sollten Sie den Sensor sorgfältig installieren, damit er die Temperatur außerhalb Ihrer Rakete auf der schattigen Seite beim Start proben kann, und idealerweise sollte er von jeglicher internen Wärme isoliert sein.
Ausgang #1

Das Mercury hat einen integrierten Hochstromanschluss, der zum Zünden von pyrotechnischen Auswurfladungen, Aktivieren eines Summers oder zum Antreiben anderer Lasten verwendet werden kann. Der Ausgang muss mit einer externen Batterie mit einem Spannungsbereich von 4 V bis 22 V versorgt werden und ist auf maximal 10–12 Ampere strombegren.
Die Verbindungspunkte auf der PCB des Mercury sind ein 2-mm-Raster, daher könnten Sie möglicherweise Stiftleisten oder einen PCB-Terminal-Block sowie direkte Drähte anlöten.
Hinweis: Wenn Sie auf das Board löten, können Sie das Gerät nicht innerhalb des 14-Tage-Rückgabezeitraums zurückgeben, obwohl dies Ihre Garantie für Fehler nicht beeinträchtigt.
Ausgang aktiviert
Verwenden Sie diese Option, um den Ausgang zu aktivieren oder zu deaktivieren. Wenn deaktiviert, wird der Ausgang unter keinen Umständen aktiviert. Dies ist eine Sicherheitsfunktion – lassen Sie diese immer deaktiviert, es sei denn, Sie haben einen spezifischen Bedarf und haben Ihre Konfiguration getestet.
Auslöser des Ausgangs
Diese Einstellung steuert, welches Ereignis den Ausgang auslöst. Die verfügbaren Optionen sind:
- Nach Apogäum (Höhe) – wird ausgelöst, wenn die Höhe nach dem Apogäum unter einen angegebenen Wert fällt. Wenn Sie beispielsweise 200 Meter einstellen, wird der Ausgang ausgelöst, wenn die Rakete auf 200 Meter unter dem Apogäum absteigt.
- Nach Apogäum (Zeit) – wird eine angegebene Anzahl von Sekunden nach Erkennung des Apogäums ausgelöst.
- Nach Start (Höhe) – wird ausgelöst, wenn die Rakete eine angegebene Höhe während des Aufstiegs erreicht.
- Nach Start (Zeit) – wird eine angegebene Anzahl von Sekunden nach Erkennung des Starts ausgelöst.
- Nach Motorabbrand (Zeit) – wird eine angegebene Anzahl von Sekunden nach Erkennung des Motorabbrand ausgelöst.
- Landung – wird ausgelöst, wenn die Landung erkannt wird.
Einschaltdauer
Diese Einstellung steuert, wie lange der Ausgang nach der Auslösung aktiv bleibt, in Sekunden. Bei Auswurfladungen wird dies typischerweise kurz gehalten (0,5 bis 2 Sekunden). Wenn der Ausgang für den gesamten Flug aktiviert bleiben muss (z. B. zum Antreiben eines Summers), stellen Sie dies auf einen hohen Wert ein.
Höhe (Meter)
Dieser Wert wird verwendet, wenn Sie einen Auslöser auswählen, der auf Höhe wirkt. Wenn Sie „Nach Apogäum (Höhe)" auswählen, wird er nach dem Apogäum ausgelöst, wenn die Höhe unter die von Ihnen gewählte Zahl fällt. Wenn Sie „Nach Start (Höhe)" auswählen, wird der Ausgang ausgelöst, sobald die Höhe während des Aufstiegs den von Ihnen eingestellten Wert erreicht.
Zeit (Sekunden)
Dies ist die Zeitverzögerung für Ihre gewählte Triggeroption. Wenn Sie „Nach Apogäum (Zeit)" auswählen, wird der Ausgang diese vielen Sekunden nach dem Apogäum aktiviert. Wenn Sie „Nach Start (Zeit)" auswählen, wird er diese vielen Sekunden nach Erkennung des Starts ausgelöst. Dasselbe gilt für die Ausbrannoption.
Höhensperrung
Diese Sicherheitseinstellung verhindert, dass der Ausgang aktiviert wird, wenn sich die Rakete innerhalb dieser Höhe über dem Startplatz befindet. Dies schützt davor, dass der Ausgang während eines abgebrochenen Starts oder eines sehr kurzen Flugs ausgelöst wird, während die Rakete noch am oder in der Nähe des Bodens ist.
Neigungswinkelsperrung
Diese Sicherheitseinstellung verhindert, dass der Ausgang aktiviert wird, wenn der Neigungswinkel außerhalb dieses Betrags von der Vertikalen abweicht. Dies ist besonders wichtig bei Auswurfladungen – wenn Ihre Rakete erheblich gekippt ist, möchten Sie möglicherweise nicht, dass eine Fallschirmauswurfladung seitlich oder abwärts gerichtet wird.
Geräte-TAG

Der Geräte-TAG befindet sich auf der Registerkarte „Allgemeine Einstellungen". Damit können Sie einen Namen oder Tag für Ihr Gerät konfigurieren. Alle hochgeladenen Flüge erhalten den von Ihnen eingestellten Tag zugewiesen, daher können Sie diesen nach Bedarf ändern. Sie können dann in der Altimeter Cloud nach Ihrem Tag suchen, um bestimmte Flüge zu finden. Nützlich, wenn Sie mehrere Mercury-Altimeter haben oder Flüge für bestimmte Raketen taggen möchten.
Gruppe

Die Gruppenoption ermöglicht es Ihnen, Standardgruppen auszuwählen und Ihren Flug gegebenenfalls in sie einzufügen und Ihre Flüge verfolgen zu wollen.
LED-Helligkeit

Die integrierten LEDs sind hell und wenn Sie sie nicht mit voller Helligkeit benötigen, können Sie Strom sparen und Abwärme reduzieren, indem Sie sie abdimmen. Unsere Standardeinstellung beträgt 20 % und wir denken, das ist für die meisten Anwendungen ausreichend.
Batteriebalken

Ab Hardware-Revision 2 gibt es einen 5-LED-Batteriebalken auf dem Board. Dieser ist während des USB-Modus ständig aktiv, um den Ladezustand anzuzeigen.
Im Flugmodus gibt es zur Minimierung des Stromverbrauchs 3 Optionen:
1 LED-Blinken (Standard) – blinkt nur die aktuelle LED des Status alle paar Sekunden.
5 LED-Blinken – blinkt den Batteriezustand als konventionellen Balken mit allen LEDs bis zum aktuellen Status alle paar Sekunden.
Nur Taste – zeigt den Batteriezustand im Flugmodus nur an, wenn Sie die Taste drücken, für kurze Zeit.
Smart Power Mode (eMode)
Stromsparmodus während Sie auf dem Startplatz warten. Es gibt zwei Optionen:
eMode 1 – betreibt die Sensoren mit 50 Hz und schaltet bei Bewegungserkennung auf volle Geschwindigkeit. Eine gute Balance zwischen Responsivität und Stromersparnis.
eMode 2 – die CPU wacht bei 25 Hz auf und liest IMU-Daten im Batch aus der Sensor-FIFO. Sensoren bleiben bei 52 Hz im Niedrigleistungsmodus. Dies halbiert die CPU-Arbeitszyklus für geringeren Stromverbrauch auf dem Startplatz. Der Batteriebalken ist deaktiviert und die Status-LED blinkt alle 8 Sekunden, anstatt ständig zu leuchten. Schaltet bei Bewegungserkennung auf volle Geschwindigkeit.
Erfordert Firmware 2.3 oder später.
eNOW
eNOW ermöglicht es Ihrem Mercury, nach dem Speichern eines Flugs kurzreichweitige Pings zu übertragen und Informationen wie Ihre Apogäumshöhe und den Batteriestand zu übertragen. Die Reichweite beträgt je nach Bedingungen und Landeorientierung etwa 80 bis 300 Meter. Erfordert Firmware 2.2 oder später.
eNOW: Aktivieren – schaltet den eNOW-Sender ein oder aus.
eNOW: Intervall – steuert, wie häufig die Pings übertragen werden.
eNOW: Start – (in Kürze verfügbar) diese Funktion überträgt eine Zusammenfassung Ihres letzten Flugs beim Einschalten und ermöglicht anderen Geräten, Flugdaten zu empfangen.
WiFi ausschalten

Dies teilt dem Altimeter mit, nicht unbegrenzt aktiv zu bleiben, wenn es sich im WiFi-/Einstellungsmodus befindet. Nach der eingestellten Zeit wird Ihr Gerät ausgeschaltet. Es ist einfach wieder einzuschalten und schnell mit der Altimeter Cloud verbunden, falls Sie später Einstellungen aktualisieren müssen.
UART

Diese Einstellung aktiviert eine serielle UART, die Sensordaten und Informationen mit 50 Hz auf die Kontakte GP6 und GP7 streamt. Wenn aktiviert, können Sie diese Kontakte nicht für Servos oder andere Ausgänge verwenden.
Die UART läuft mit 921.600 Baud, 8 Bit mit 1 Stoppbit, um die Akkulaufzeit zu maximieren. GP6 ist der TX-Pin (verbinden Sie mit Ihrem RX) und GP7 ist der RX-Pin (verbinden Sie mit Ihrem TX). Sie sehen etwa einen 5 % Rückgang der Akkulaufzeit bei Verwendung des UART-Modus.
Warnung: Die UART läuft im 3,3V-Modus. Bitte übertragen Sie nicht zum Gerät, da es keine Funktion hat, und senden Sie besonders kein 5V-Signal, da dies Ihren Mercury beschädigen könnte.
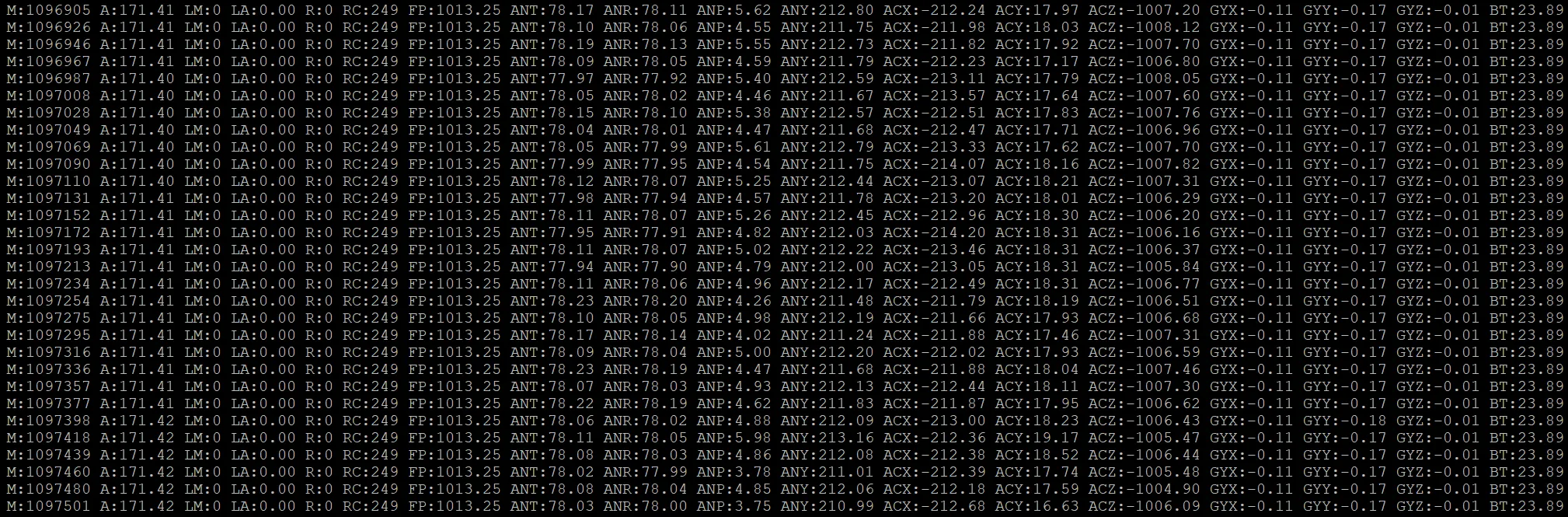
Die Streaming-Ausgabevariablen sind:
M: Millisekunden seit dem Einschalten des Mercury.
A: Aktuelle Höhe in Metern.
LM: Millisekunden, wenn die Rakete den Startplatz verließ (wenn Startdetektion erkannt).
LA: Höhe des Startplatzes beim Start. Von aktueller Höhe subtrahieren, um Live-Flughöhe zu erhalten.
R: 1, wenn das Gerät aufzeichnet.
RC: Anzahl der Abtastungen im Flugprotokoll (zeigt 249 wenn nicht aufzeichnet – dies ist der Vor-Flug-Rollpuffer).
FP: Prognostizierter Luftdruck, der verwendet wird.
ANT: Neigungswinkel von vertikal (Grad).
ANR: Rollwinkel (Grad).
ANP: Nickwinkel (Grad).
ANY: Gierwinkel (Grad).
ACX/ACY/ACZ: Beschleunigung für jede Achse (-32000 bis +32000 mG).
GYX/GYY/GYZ: Gyroskop für jede Achse (-2000 bis +2000 dps).
BT: Board-Temperatur vom Drucksensor.
MT1: MT1-Temperatursensorablesung (falls verbunden).
Gerätesprache

Dies setzt die native Sprache für die Geräteschnittstelle, die für den Web-Server des Geräts und die Verbindung des Zugriffspunkts verwendet wird. Es werden mehrere Sprachen angeboten und in zukünftigen Firmware-Versionen können weitere hinzugefügt werden.
Sensorkalibrierung

Für die genauesten Daten empfehlen wir, Ihre Sensoren zu kalibrieren. Aktivieren Sie das Kalibrierungskontrollkästchen und speichern Sie – die Kalibrierung wird ausgeführt, wenn das Gerät das nächste Mal in den Flugmodus wechselt.
Es gibt eine dedizierte Seite, die den Kalibrierungsprozess abdeckt: Kalibrierungsanleitung anzeigen
Servo-Unterstützung (GP6 & GP7)

Das Mercury hat zwei allgemeine Lötkontakte (GP6 und GP7), die jeweils als Standard-HIGH/LOW-Ausgang oder Servo-Signalausgang konfiguriert werden können. Wenn als Servo konfiguriert, können Sie die Min./Max.-Impulsbreiten, Frequenz, EIN/AUS-Winkel und Haltezeit einstellen. Diese Ausgänge werden über das Aktionsregelsystem gesteuert. Erfordert Firmware 2.0 oder später.
Es gibt eine dedizierte Seite zur Servo-Konfiguration: Servo-Konfigurationsanleitung anzeigen
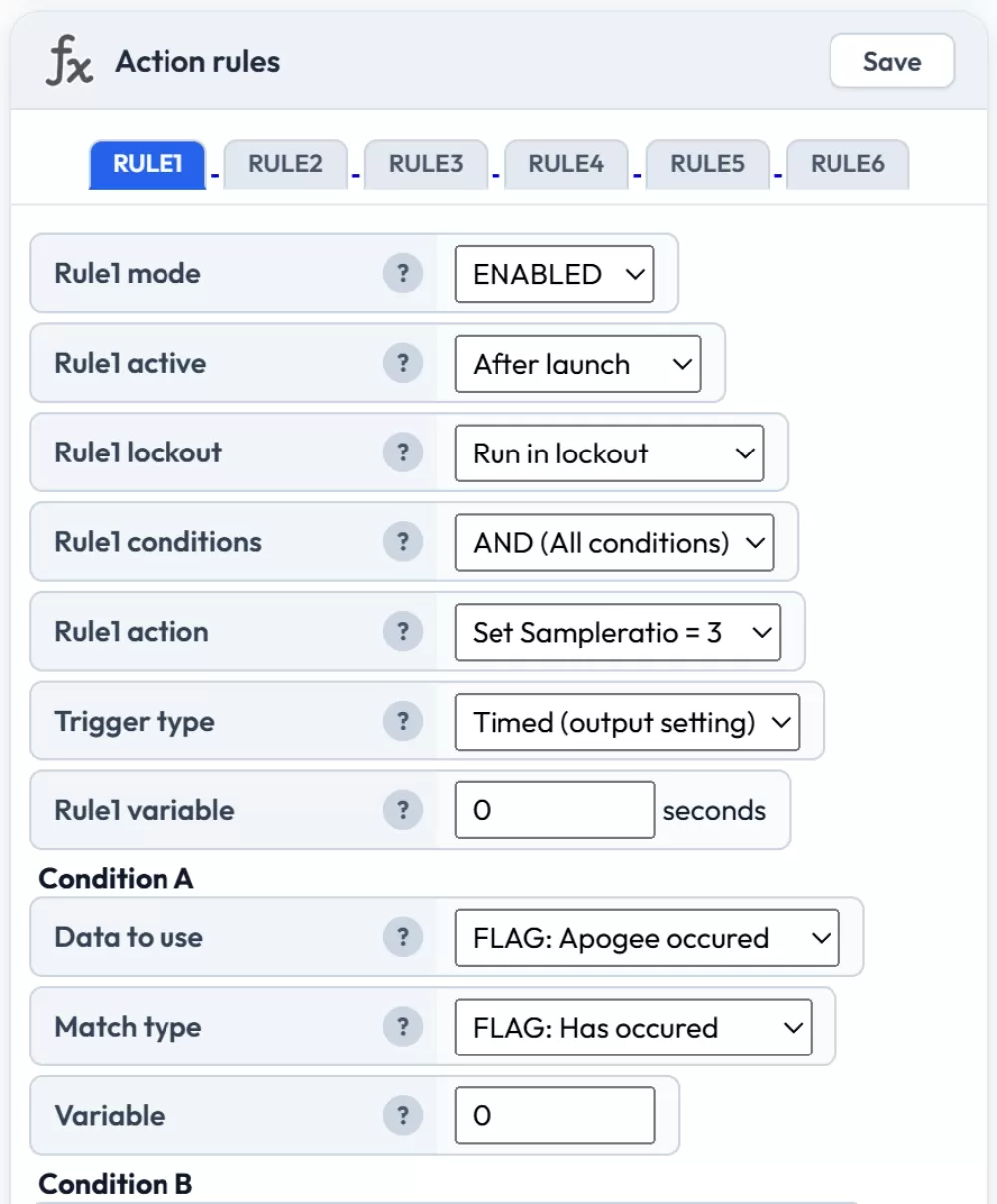
Aktionsregeln

Das Regelsystem ist die leistungsstärkste Funktion des Mercury. Sie können bis zu 6 unabhängige Regeln erstellen, jeweils mit bis zu 4 Bedingungen, die erfüllt sein müssen, bevor die Aktion ausgelöst wird. Regeln können Ausgänge, Servos, Abtastverhältnisse und mehr steuern.
Es gibt eine dedizierte Seite, die das Aktionsregelsystem mit Beispielen abdeckt: Aktionsregeln-Anleitung anzeigen
Vorhersage & Luftbremsen

Das Mercury kann die Apogäumshöhe während der Gleitphase nach dem Motorabbrand vorhersagen. Diese Informationen werden in Ihren Flugdiagrammen angezeigt und können auch zum Antrieb eines aktiven Luftbremssystems verwendet werden. Erfordert Firmware 2.1 oder später.
Es gibt eine dedizierte Seite zur Vorhersage und zu Luftbremsen: Vorhersage & Luftbremsen-Anleitung anzeigen
ROC2 Hochstromanschluss-Board
Das ROC2 ist ein Erweiterungs-Board, das zwei zusätzliche Hochstromanschlüsse bereitstellt. Aktivieren Sie das Board in den Einstellungen und konfigurieren Sie dann jeden Ausgabekanal mit den gleichen Triggeroption, die für Ausgang #1 verfügbar sind. Die ROC2-Ausgänge können auch über das Aktionsregelsystem mit den ROC2 OUT1- und ROC2 OUT2-Aktionen gesteuert werden.
Wenn das ROC2-Board in den Einstellungen aktiviert ist, aber nicht physisch erkannt wird, wenn Sie den Flugmodus betreten, blinkt die Status-LED 5 Sekunden lang rot als Warnung.
I2C PCA9685 Servo-Erweiterungs-Board
Sie können ein PCA9685-basiertes I2C Servo-Erweiterungs-Board an Ihr Mercury anschließen und bis zu 6 zusätzliche Servo-Kanäle bereitstellen. Diese Servos werden über das Aktionsregelsystem gesteuert und ermöglichen komplexe Multi-Servo-Setups für Luftbremsen, Flügelsteuerung, Nutzlastfreigabe oder andere Mechanismen. Erfordert Firmware 2.0 oder später.
Die Einstellungen umfassen den Board-Aktivierungsschalter, die Oszillatorfrequenz (Standard 25 MHz – nur anpassen, wenn Ihr Board einen anderen Quarz verwendet) und die individuelle Servo-Konfiguration für jeden der 6 Kanäle, einschließlich Min./Max.-Impulsbreite und Frequenz.
WiFi-Einstellungen
Sie können bis zu 4 WiFi-Netzwerke konfigurieren. Das Gerät stellt eine Verbindung mit dem gespeicherten Netzwerk her, das das stärkste Signal hat. Dies ist nützlich, wenn Sie Ihr Haus-WiFi, einen mobilen Hotspot zum Einsatz vor Ort und vielleicht auch das WiFi Ihres Clubs auf dem Startplatz alle gespeichert haben.
WiFi-Einstellungen werden erst bei nächster WiFi-Aktivierung wirksam. Sie können dies auslösen, indem Sie das USB-C-Kabel ausstecken und wieder einstecken oder das Gerät ausschalten und wieder einschalten.
Warnung: Wenn Sie falsche WiFi-Anmeldedaten eingeben, kann Ihr Gerät die Verbindung zur Altimeter Cloud verlieren. Sie müssen eine Verbindung über seinen Zugriffspunkt WiFi herstellen, um die Einstellungen zu korrigieren.
WiFi TX-Leistung
Die Sendeleistung des WiFi-Funkgeräts. Höhere Werte bieten eine bessere Reichweite, verbrauchen aber mehr Batterie.