Le moyen le plus simple de configurer votre altimètre est via Altimeter Cloud. Si vous ne l'avez pas déjà fait, vous pouvez utiliser le guide WiFi Altimeter Cloud pour connecter votre appareil.
Trouver la page des paramètres de l'appareil
![]()
Cliquez sur l'onglet Mes appareils en haut du site web Altimeter Cloud. Vous verrez une liste des appareils sur votre compte. Cliquez sur le bouton Paramètres de l'appareil que vous souhaitez configurer.
Lorsque vous cliquez sur enregistrer, les paramètres sont transmis à votre altimètre. Cela prend généralement 1 à 4 secondes tant que votre altimètre est allumé et connecté à WiFi.
Les paramètres par défaut sont un excellent point de départ pour la plupart des vols, donc ne soyez pas submergé par le nombre d'options disponibles. Ceux-ci offrent un réglage avancé et des fonctionnalités supplémentaires si vous en avez besoin. Pour la plupart des vols, le Mercury n'a besoin que d'être allumé et il est prêt à fonctionner.
Pression de prévision

La pression de prévision est la pression de prévision météorologique au niveau de la mer pour votre lieu de lancement. La valeur par défaut standard est 1013,25 mBar, qui est la moyenne atmosphérique. Votre altimètre fonctionnera bien avec cette valeur par défaut, cependant pour la plus grande précision, vous devez entrer la pression de prévision pour le jour et l'heure de votre vol. Cela fait plus de différence si vous lancez depuis des sites en altitude ou par des jours avec une pression extrêmement basse ou haute.
Un bon site web au Royaume-Uni pour rechercher ces pressions est xcweather.co.uk.
Détection de lancement

Le paramètre de détection de lancement indique à l'altimètre à quelle altitude il doit atteindre (altitude de pression) avant de déclencher la détection de lancement et de commencer l'enregistrement. Le paramètre par défaut de 25 mètres est parfait pour presque toutes les occasions. Les paramètres plus bas sont pour les vols à très basse altitude qui ne peuvent pas atteindre 10 à 20 mètres, ou pour tester votre appareil en le jetant en l'air.
Remarque : Les capteurs de pression sont sensibles à la lumière, donc si vous montez votre altimètre directement dans votre baie électronique ou n'utilisez pas le boîtier Mercury par défaut, vous devez vous assurer que la lumière ne puisse pas pénétrer dans le capteur. Cela augmentera considérablement le bruit dans vos lectures d'altitude.
Remarque : Tirer votre cône de nez ou tube de fuselage peut créer une pression de vide qui pourrait déclencher la détection de lancement de l'altimètre. Nous avons un système pour nous protéger contre cela qui est activé par défaut, veuillez également lire à propos de Launch ALP plus loin sur la page.
Votre altimètre n'utilise pas une pression fixe d'avant l'activation de l'appareil comme référence pour l'altitude du pas de tir. Au lieu de cela, il met constamment à jour une moyenne provenant d'environ 5 à 10 secondes de données à 50 fois par seconde. Cela signifie que si vous l'allumez plus bas ou plus haut que votre pas de tir, ou qu'il reste un certain temps sur votre pad, les changements de pression atmosphérique n'affecteront pas la précision de vos données de vol.
Vitesse des capteurs

Le Mercury exécute ses capteurs à 100 Hz par défaut. Nous vous suggérons de vous y tenir par défaut. Vous pouvez réduire cela à 50 Hz si vous le souhaitez, mais cela a très peu d'avantages à part quelques pour cent de plus d'autonomie de batterie.
Rapport d'échantillonnage

Le Mercury s'exécute à un cycle de 50 Hz ou 100 Hz en prenant des lectures des capteurs et en effectuant des calculs. Vous pouvez choisir la fréquence à laquelle enregistrer ces échantillons dans le journal de vol.
Par défaut, le Mercury enregistrera chaque cycle, ce qui vous donne un maximum de détails. Vous pouvez utiliser ce paramètre pour enregistrer tous les 1, 2, 3 ou 4 échantillons à la place. Cela vous permet d'enregistrer plus longtemps dans la limite de 12 000 échantillons par vol.
Les modes hybrides commencent à pleine résolution 1:1 puis basculent à un ratio réduit dix secondes après l'apogée. Cela vous donne un maximum de détails pendant les phases alimentée et de planage, tout en étendant considérablement le temps d'enregistrement total. Par exemple, le mode hybride peut étendre l'enregistrement d'environ 4 minutes à plus de 8 minutes.
Ils reviennent également à un rapport d'échantillonnage 1:1 lorsque l'altitude descend en dessous de 20 m en descente pour capturer aussi l'atterrissage à vitesse maximale.
Il est également possible d'utiliser le système de règles pour modifier le taux d'enregistrement après des événements spécifiques ou une heure. Par exemple, vous pouvez configurer une règle pour réduire le rapport d'échantillonnage après l'apogée.
Échantillons max

Le paramètre Échantillons max est le nombre de lignes dans votre journal de vol ou le nombre d'échantillons lorsque l'enregistrement s'arrêtera automatiquement. Le maximum est 12 000 échantillons par vol, mais si vous souhaitez fonctionner pendant une durée fixe, vous pouvez désactiver l'arrêt automatique et définir les échantillons maximums selon vos besoins.
Arrêt de l'enregistrement

L'arrêt de l'enregistrement détermine quand terminer un enregistrement de vol. Le paramètre par défaut d'arrêt automatique (450 échantillons stables) sera parfait pour la grande majorité des vols.
L'arrêt automatique analyse les 450 ou 900 derniers échantillons et si 98 % de ceux-ci se trouvent à une petite distance de la moyenne récente, le Mercury est considéré comme n'ayant pas bougé pendant une période significative et l'enregistrement sera arrêté. Il y a aussi un mode d'arrêt manuel, où vous devez appuyer sur le BOUTON (pas le BOUTON D'ALIMENTATION) pour arrêter l'enregistrement.
Une fois que l'enregistrement est terminé, le voyant d'état deviendra ROSE pendant que les journaux de vol sont enregistrés dans la mémoire flash. Une fois cela terminé, l'appareil s'éteindra tout seul, alors ne paniquez pas si vous arrivez à votre fusée et que votre appareil est éteint — il a enregistré et vous n'avez pas oublié de l'allumer.
Suréchantillonnage

Ceci est le paramètre du capteur de pression BMP390 qui lui indique combien d'échantillons internes à prendre pour chaque échantillon qu'il produit. Le BMP390 prend en charge environ 205 Hz d'échantillons. Vous devez laisser ce paramètre sur le réglage par défaut 8X. Le seul avantage à le réduire est quelques pour cent d'autonomie de batterie supplémentaire.
Le suréchantillonnage permet au capteur de pression d'augmenter sa précision. Chaque incrément de suréchantillonnage augmente la précision de sortie de 1 bit. Par exemple, le suréchantillonnage 1x offre une résolution de pression de 16 bits avec une résolution d'altitude d'environ 20 cm, tandis que le suréchantillonnage 4x offre 18 bits et une résolution d'environ 5 cm.
Les révisions ultérieures à partir de la révision 3 utilisent un capteur de pression BMP581 qui fonctionne encore plus vite et a un taux de suréchantillonnage par défaut de 16X. Il y a vraiment peu de raisons de réduire cela.
Filtre IIR

Le filtre IIR est le deuxième filtre interne du capteur de pression BMP390 ou BMP581. IIR signifie Infinite Impulse Response, et en pratique c'est un filtre efficace qui lisse plusieurs échantillons. Cela aide à éliminer les pics soudains et le bruit comme le vent soufflant dans le capteur.
Pour la plupart des utilisations, vous souhaiterez le régler sur 1, 3 ou 7, mais n'hésitez pas à expérimenter. S'il est réglé trop haut, il peut causer des problèmes de précision aux pics et lors des changements d'altitude rapides. Les paramètres élevés causeront un léger délai pour que la sortie atteigne l'altitude réelle, mais peuvent offrir d'excellents résultats pour les éléments à mouvement lent comme les ballons météorologiques.

Filtre de pression (Kalman)

Le filtre de pression est un filtre de Kalman qui s'exécute sur le processeur plutôt que sur le capteur. Vous pouvez choisir parmi 4 paramètres : ARRÊT ou trois niveaux de filtrage. C'est un filtre avancé qui estime la pression réelle en fonction des échantillons actuels et historiques.
Le paramètre du milieu fonctionne parfaitement pour la plupart des vols. Vous pouvez demander au filtre de faire plus ou moins de filtrage avec les autres options. Les filtres de Kalman sont extrêmement bons pour éliminer le bruit des données des capteurs, laissant un chemin d'altitude très amélioré et plus réaliste.
Temps de verrouillage

Le filtre de verrouillage détecte les événements qui font lire une mauvaise altitude au capteur de pression. Cela peut être une charge d'éjection qui explose, ce qui augmente la pression à l'intérieur de la fusée et fait penser au capteur qu'il y a eu une soudaine chute d'altitude. Une autre cause courante est que les fusées entrent à des vitesses supersoniques, ce qui provoque également une perturbation de la pression.
Ce paramètre contrôle la durée pendant laquelle l'appareil doit se verrouiller avant de prendre des décisions sur les sorties et autres calculs lorsqu'il détecte l'un de ces événements. La valeur par défaut de 500 ms fonctionne bien pour la plupart des situations.
Changement de verrouillage

La détection de verrouillage fonctionne en détectant si l'altitude a chuté si rapidement qu'elle dépasse ce montant entre un seul échantillon. Bien que ces valeurs semblent petites, rappelez-vous qu'elle fonctionne à 50 échantillons par seconde (la valeur est doublée automatiquement en mode 16 échantillons par seconde).
Une chute de 1,5 m entre les échantillons équivaut à une chute de 48 mètres par seconde ou environ 107 mph — ce que votre fusée ne devrait normalement pas atteindre dans une direction descendante.
Synchroniser les capteurs

Les différents capteurs ont des filtres différents et cela peut causer un léger délai dans les données d'un capteur par rapport à un autre. Le résultat est que différents capteurs seront légèrement désynchronisés les uns avec les autres.
Ce paramètre active l'algorithme de re-synchronisation. Il regarde en arrière lorsque le lancement est détecté pour l'événement de lancement probable dans chaque capteur. Il décale ensuite les données de chaque capteur dans le tampon par rapport au capteur de pression pour les re-synchroniser. Recommandé de rester activé.
Filtre IMU

Le filtre IMU fusionne les données à 6 axes du gyroscope et de l'accéléromètre pour calculer des angles tels que le tangage, le roulis, le lacet et l'angle d'inclinaison par rapport à la verticale. Le filtre Madgwick utilise un peu plus de puissance de traitement mais est plus précis que le filtre Mahony.
Le Mercury n'a pas de magnétomètre pour la fusion à 9 axes, donc de petites erreurs s'accumuleront au fil du temps. D'après nos tests, celles-ci sont très petites et le filtre offre d'excellentes données pendant la durée d'un vol de fusée standard.
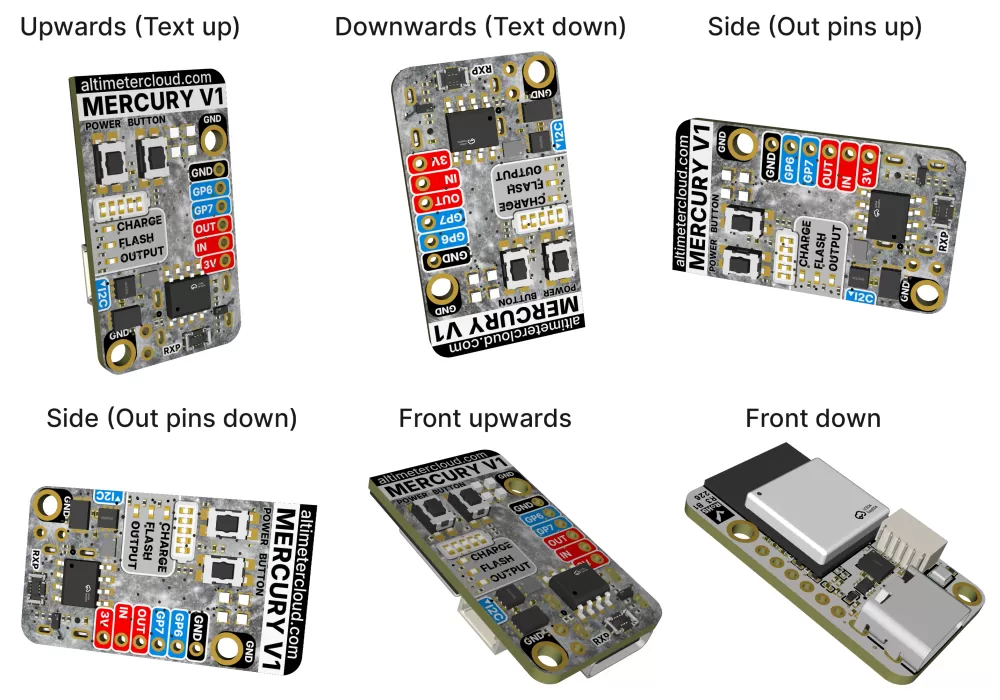
Pour obtenir les meilleurs résultats, vous devez calibrer vos capteurs et monter votre altimètre dans l'une des orientations prises en charge.
Orientation

Le paramètre d'orientation indique à l'altimètre comment vous envisagez de l'installer. Bien qu'il puisse le déterminer lui-même, ce paramètre garantit que le filtre IMU reçoit les données d'axe correctes dans le bon ordre pour des calculs d'angle précis. La valeur par défaut est verticale avec le port USB pointant vers le bas.
Launch ALP (Prévention du lancement accidentel)

Ce paramètre aide à prévenir la détection de lancement accidentel. Sans ALP, l'altimètre ne compte que sur le capteur de pression et l'altitude qu'il indique. Cela signifie que de fortes rafales de vent, ou même l'enlèvement de votre cône de nez, pourraient causer un changement de pression suffisant pour déclencher la détection de lancement.
Avec ALP activé, l'altimètre utilise à la fois le capteur de pression et l'accéléromètre pour vérifier le lancement. Pour se déclencher, l'altimètre doit voir 8 échantillons au cours des 3 dernières secondes au-dessus du niveau d'accélération en G défini ainsi que l'altitude dépassant le seuil de détection de lancement.
Il y a aussi un déclencheur de secours : une fois que l'altimètre a été au-dessus du seuil de lancement pendant 1,05 seconde, il déclenchera la détection de lancement indépendamment. Cela garantit que les lancements véritablement lents sont toujours détectés.
Verrouillage de lancement

Ce paramètre empêche l'altimètre de détecter un lancement sous quelque circonstance que ce soit jusqu'à ce que le temps spécifié se soit écoulé depuis l'activation du Mercury. Par exemple, si vous définissez ceci sur 180 secondes (3 minutes), votre altimètre attendra que ce temps s'écoule avant de chercher la détection de lancement. Pour la plupart des utilisations, il est préférable de laisser ceci réglé sur 0.
Température statique

Lors du calcul de l'altitude à partir de la pression, l'équation utilise à la fois le paramètre de pression de prévision et ce paramètre de température statique. Les paramètres par défaut sont respectivement 1013,25 mBar et 15,0 °C.
Si vous modifiez ces valeurs avec les valeurs réelles le jour de votre vol, vous obtiendrez les calculs d'altitude les plus précis.
Capteur de température

Le capteur de température à bord sera affecté par la chaleur de la carte elle-même et par le fait que l'intérieur de votre fusée est peu susceptible de refléter la température externe. Vous pouvez connecter l'un de nos petits capteurs de température MT1 au port d'expansion I2C sur votre Mercury pour une lecture beaucoup plus précise (précision de 0,1 °C).
Une fois connecté, vous pouvez choisir d'enregistrer uniquement la température MT1 dans votre journal de vol, ou à la fois l'enregistrer et l'utiliser comme température statique au lancement pour les calculs d'altitude.
Si vous envisagez de l'utiliser comme votre température statique, prenez soin d'installer le capteur pour qu'il puisse échantillonner la température en dehors de votre fusée du côté ombragé tout en restant sur le pas de tir, et idéalement isolez-le de toute chaleur interne.
Sortie #1

Le Mercury possède une sortie à courant élevé intégrée qui peut être utilisée pour déclencher des charges de déploiement pyrotechniques, activer un buzzer ou entraîner d'autres charges. La sortie doit être alimentée par une batterie externe avec une plage de tension de 4 V à 22 V et est limitée en courant à un maximum de 10 à 12 ampères.
Les points de connexion sur le PCB du Mercury sont un pas de 2 mm, vous pourriez donc potentiellement souder des broches d'en-tête ou un bloc de bornes PCB ainsi que des fils directs.
Remarque : Si vous soudez sur la carte, vous ne pourrez pas retourner l'appareil dans le délai de rétractation de 14 jours, bien que cela n'affecte pas votre garantie pour les défauts.
Sortie activée
Utilisez cette option pour activer ou désactiver la sortie. Si désactivée, la sortie ne s'activera sous aucune circonstance. C'est une fonction de sécurité — laissez-la toujours désactivée à moins que vous n'ayez un besoin spécifique et que vous ayez testé votre configuration.
Déclencheur de sortie
Ce paramètre contrôle quel événement déclenche la sortie. Les options disponibles sont :
- Après l'apogée (altitude) — se déclenche lorsque l'altitude chute en dessous d'une valeur spécifiée après l'apogée. Par exemple, si vous définissez 200 mètres, la sortie se déclenche lorsque la fusée descend à 200 mètres en dessous de l'apogée.
- Après l'apogée (temps) — se déclenche un nombre de secondes spécifié après la détection de l'apogée.
- Après le lancement (altitude) — se déclenche lorsque la fusée atteint une altitude spécifiée lors de la montée.
- Après le lancement (temps) — se déclenche un nombre de secondes spécifié après la détection du lancement.
- Après le burnout du moteur (temps) — se déclenche un nombre de secondes spécifié après la détection du burnout du moteur.
- Atterrissage — se déclenche lors de la détection de l'atterrissage.
Durée d'activation
Ce paramètre contrôle la durée pendant laquelle la sortie reste active une fois déclenchée, en secondes. Pour les charges de déploiement, ceci est généralement maintenu court (0,5 à 2 secondes). Si vous avez besoin que la sortie reste allumée pendant tout le vol (par exemple pour entraîner un buzzer), définissez ceci sur une valeur élevée.
Altitude (mètres)
Cette valeur est utilisée si vous choisissez un déclencheur qui fonctionne sur l'altitude. Si vous sélectionnez « Après l'apogée (altitude) », il se déclenche après l'apogée lorsque l'altitude chute en dessous du nombre que vous choisissez. Si vous sélectionnez « Après le lancement (altitude) », la sortie se déclenche une fois que l'altitude atteint la valeur que vous définissez lors de la montée.
Temps (secondes)
C'est le délai d'attente pour votre option de déclenchement choisie. Si vous sélectionnez « Après l'apogée (temps) », la sortie se déclenche ce nombre de secondes après l'apogée. Si vous sélectionnez « Après le lancement (temps) », elle se déclenche ce nombre de secondes après la détection du lancement. Il en va de même pour l'option burnout.
Verrouillage d'altitude
Ce paramètre de sécurité empêche la sortie d'être activée si la fusée est à cette altitude du pas de tir. Cela protège contre l'activation de la sortie alors que la fusée est toujours sur ou près du sol, par exemple lors d'un lancement avorté ou d'un vol très court.
Verrouillage d'angle d'inclinaison
Ce paramètre de sécurité empêche la sortie de se déclencher si l'angle d'inclinaison est en dehors de ce montant par rapport à la verticale. Ceci est particulièrement important pour les charges de déploiement — si votre fusée s'est penchée de manière significative, vous ne voudrez peut-être pas qu'elle déclenche une charge de déploiement de parachute pointée sur le côté ou vers le bas.
TAG d'appareil

Le TAG d'appareil se trouve sous l'onglet des paramètres généraux. Cela vous permet de configurer un nom ou un tag pour votre appareil. Tous les vols téléchargés seront assignés au tag que vous avez défini, vous pouvez donc le modifier selon les besoins. Vous pouvez ensuite rechercher sur Altimeter Cloud votre tag pour trouver des vols spécifiques. Utile si vous avez plusieurs altimètres Mercury ou si vous souhaitez taguer les vols pour des fusées spécifiques.
Groupe

L'option Groupe vous permet de sélectionner des groupes standard pour ajouter votre vol dedans si applicable et vous souhaitez garder une trace parmi d'autres vols.
Luminosité du LED

Les LED intégrées sont brillantes et si vous n'en avez pas besoin à pleine luminosité, vous pouvez économiser de l'énergie et réduire la chaleur dissipée en les atténuant. Notre paramètre par défaut est 20 % et nous pensons que c'est amplement suffisant pour la plupart des utilisations.
Barre de batterie

À partir de la révision matérielle 2, il y a une barre de batterie à 5 LED sur la carte. Elle est constamment allumée en mode USB pour afficher l'état de la charge.
En mode vol, pour minimiser la consommation d'énergie, il y a 3 options :
Clignotement 1 LED (défaut) — clignote uniquement le LED de l'état actuel toutes les quelques secondes.
Clignotement 5 LED — clignote l'état de la batterie sous forme d'une barre classique avec tous les LED jusqu'à l'état actuel illuminés toutes les quelques secondes.
Bouton uniquement — affiche uniquement l'état de la batterie en mode vol lorsque vous appuyez sur le bouton, pendant une courte période.
Mode d'alimentation intelligent (eMode)
Mode d'économie d'énergie en attendant sur le pas de tir. Il y a deux options :
eMode 1 — exécute les capteurs à 50 Hz et bascule à vitesse maximale à la détection de mouvement. Un bon équilibre entre réactivité et économie d'énergie.
eMode 2 — le CPU s'éveille à 25 Hz et lit par lots les données IMU du FIFO du capteur. Les capteurs restent à 52 Hz en mode basse puissance. Cela réduit de moitié le cycle de travail du CPU pour une consommation d'énergie inférieure au pad. La barre de batterie est désactivée et le LED d'état clignote toutes les 8 secondes au lieu d'être constamment allumé. Bascule à vitesse maximale à la détection de mouvement.
Nécessite le firmware 2.3 ou ultérieur.
eNOW
eNOW permet à votre Mercury de transmettre des pings à courte portée après l'enregistrement d'un vol, diffusant des informations telles que votre altitude d'apogée et le niveau de batterie. La portée est d'environ 80 à 300 mètres selon les conditions et l'orientation de l'atterrissage. Nécessite le firmware 2.2 ou ultérieur.
eNOW : Activer — active ou désactive l'émetteur eNOW.
eNOW : Intervalle — contrôle la fréquence à laquelle les pings sont transmis.
eNOW : Démarrage — (à venir) cette fonction diffusera un résumé de votre vol le plus récent lors de la mise en marche, permettant aux autres appareils de recevoir les données de vol.
Extinction WiFi

Cela indique à l'altimètre de ne pas rester allumé indéfiniment lorsqu'il est en mode WiFi / Paramètres. Après le délai défini, votre appareil s'éteindra. C'est facile à rallumer et rapide de se reconnecter à Altimeter Cloud si vous avez besoin de mettre à jour des paramètres à nouveau ultérieurement.
UART

Ce paramètre active un UART série qui diffuse les données des capteurs et les informations à 50 Hz sur les pads de soudure GP6 et GP7. Lorsqu'activé, vous ne pourrez pas utiliser ces pads pour des servos ou d'autres sorties.
L'UART fonctionne à 921600 baud, 8 bits avec 1 bit d'arrêt pour maximiser l'autonomie de la batterie. GP6 est la broche TX (connecter à votre RX) et GP7 est la broche RX (connecter à votre TX). Vous verrez une chute d'environ 5 % de l'autonomie de la batterie lors de l'utilisation du mode UART.
Avertissement : L'UART fonctionne en mode 3,3V. Veuillez ne pas transmettre à l'appareil car cela ne sert à aucune fonction, et en particulier n'envoyez pas un signal 5V car cela pourrait endommager votre Mercury.
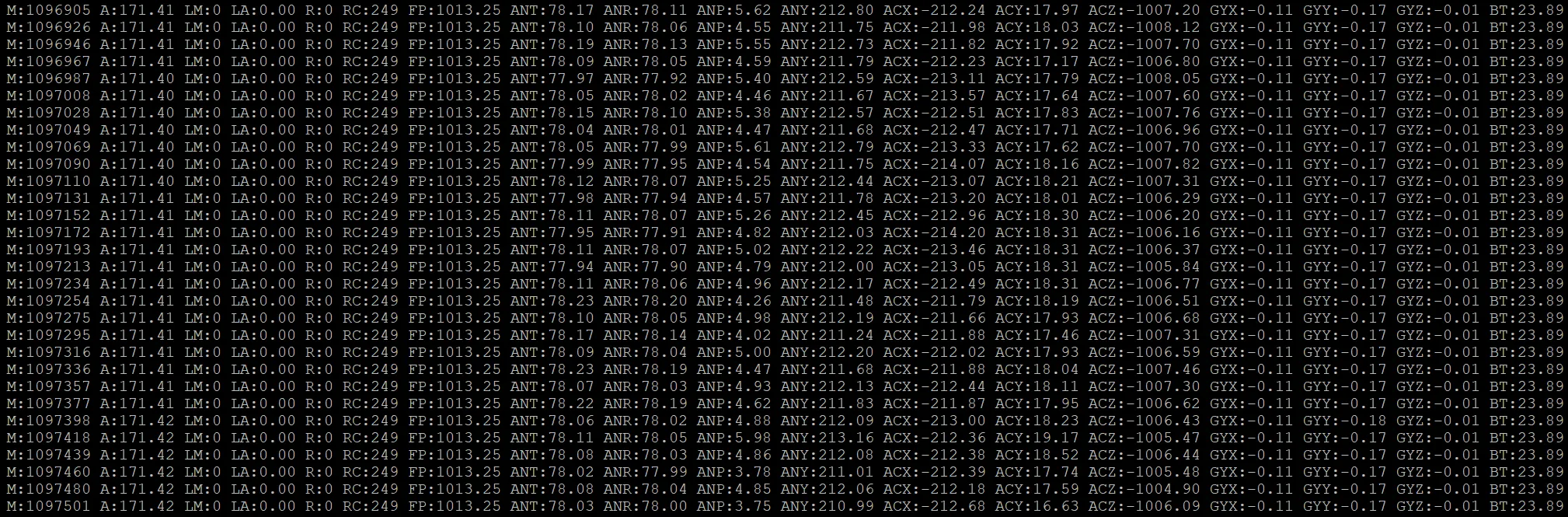
Les variables de sortie en continu sont :
M : Millisecondes depuis l'activation du Mercury.
A : Altitude actuelle en mètres.
LM : Millisecondes lorsque la fusée a quitté le pad (si lancement détecté).
LA : Altitude du pad au lancement. Soustrayez de l'altitude actuelle pour la hauteur du vol en direct.
R : 1 si l'appareil enregistre.
RC : Nombre d'échantillons dans le journal de vol (affiche 249 quand pas d'enregistrement — c'est le tampon roulant de pré-vol).
FP : Pression de prévision utilisée.
ANT : Angle d'inclinaison par rapport à la verticale (degrés).
ANR : Angle de roulis (degrés).
ANP : Angle de tangage (degrés).
ANY : Angle de lacet (degrés).
ACX/ACY/ACZ : Accélération pour chaque axe (-32000 à +32000 mG).
GYX/GYY/GYZ : Gyroscope pour chaque axe (-2000 à +2000 dps).
BT : Température de la carte à partir du capteur de pression.
MT1 : Lecture du capteur de température MT1 (si connecté).
Langue de l'appareil

Cela définit la langue native de l'interface de l'appareil, utilisée pour le serveur web de l'appareil et la connexion du point d'accès. Plusieurs langues sont proposées et d'autres peuvent être ajoutées dans les firmware futurs.
Étalonnage des capteurs

Pour les données les plus précises, nous recommandons d'étalonner vos capteurs. Cochez la case d'étalonnage et enregistrez — l'étalonnage s'exécutera la prochaine fois que l'appareil entrera en mode vol.
Il y a une page dédiée couvrant le processus d'étalonnage : Voir le guide d'étalonnage
Support des servos (GP6 & GP7)

Le Mercury a deux pads à usage général de soudure (GP6 et GP7) qui peuvent chacun être configurés soit comme une sortie HIGH/LOW standard soit comme une sortie de signal servo. Lorsqu'ils sont configurés comme servo, vous pouvez définir les largeurs d'impulsion min/max, la fréquence, les angles ON/OFF et le temps de maintien. Ces sorties sont contrôlées via le système de règles d'action. Nécessite le firmware 2.0 ou ultérieur.
Il y a une page dédiée couvrant la configuration des servos : Voir le guide de configuration des servos
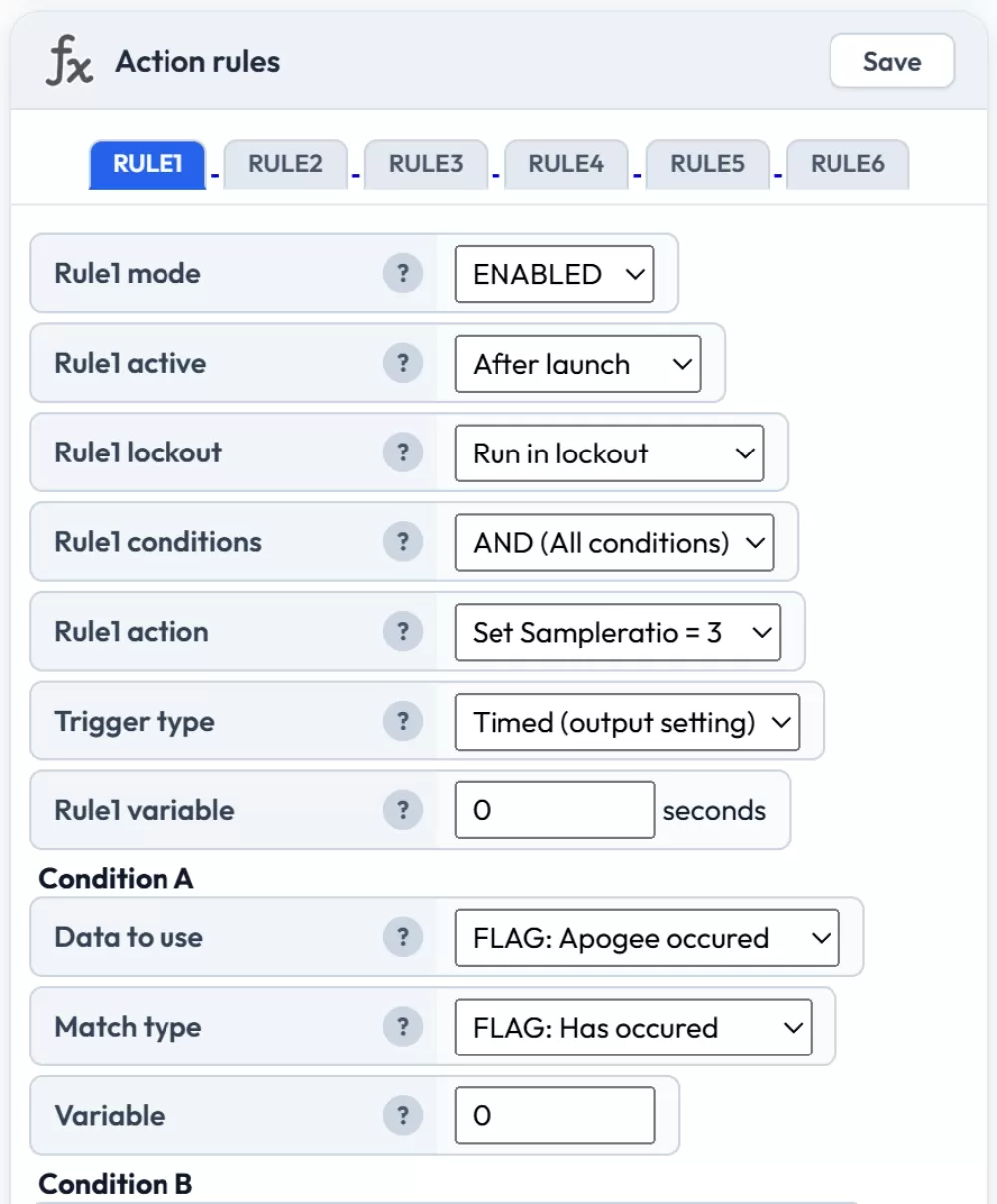
Règles d'action

Le système de règles est la fonctionnalité la plus puissante du Mercury. Vous pouvez créer jusqu'à 6 règles indépendantes, chacune avec jusqu'à 4 conditions qui doivent être remplies avant le déclenchement de l'action. Les règles peuvent contrôler les sorties, les servos, les rapports d'échantillonnage et bien plus encore.
Il y a une page dédiée couvrant le système de règles d'action avec des exemples : Voir le guide des règles d'action
Prédiction et freins aérodynamiques

Le Mercury peut prédire l'altitude d'apogée pendant la phase de planage après le burnout du moteur. Ces informations apparaissent sur vos graphiques de vol et peuvent également être utilisées pour entraîner un système actif de freins aérodynamiques. Nécessite le firmware 2.1 ou ultérieur.
Il y a une page dédiée couvrant la prédiction et les freins aérodynamiques : Voir le guide de prédiction et freins aérodynamiques
Carte de sortie haute puissance ROC2
Le ROC2 est une carte d'expansion qui fournit deux sorties supplémentaires à courant élevé. Activez la carte dans les paramètres, puis configurez chaque canal de sortie avec les mêmes options de déclenchement disponibles pour la sortie #1. Les sorties ROC2 peuvent également être contrôlées via le système de règles d'action en utilisant les actions ROC2 OUT1 et ROC2 OUT2.
Si la carte ROC2 est activée dans les paramètres mais n'est pas physiquement détectée lors de l'entrée en mode vol, le LED d'état clignotera en rouge pendant 5 secondes comme avertissement.
Carte d'expansion servo I2C PCA9685
Vous pouvez connecter une carte d'expansion servo I2C basée sur PCA9685 à votre Mercury, fournissant jusqu'à 6 canaux de servo supplémentaires. Ces servos sont contrôlés par le système de règles d'action, permettant des configurations multi-servo complexes pour les freins aérodynamiques, le contrôle des ailerons, le déploiement de charge utile ou d'autres mécanismes. Nécessite le firmware 2.0 ou ultérieur.
Les paramètres incluent le basculement d'activation de la carte, la fréquence de l'oscillateur (25 MHz par défaut — ajustez uniquement si votre carte utilise un cristal différent) et la configuration de servo individuel pour chacun des 6 canaux y compris la largeur d'impulsion min/max et la fréquence.
Paramètres WiFi
Vous pouvez configurer jusqu'à 4 réseaux WiFi. L'appareil se connectera au réseau enregistré qui a le signal le plus fort. Ceci est utile pour avoir votre WiFi domestique, un point d'accès mobile pour le terrain et peut-être le WiFi du site de lancement de votre club, tous enregistrés.
Les paramètres WiFi ne prennent effet que la prochaine fois que WiFi démarre. Vous pouvez déclencher cela en débrancher et en réinsérant le câble USB-C ou en éteignant et rallumant l'appareil.
Avertissement : Si vous entrez des identifiants WiFi incorrects, votre appareil risque de perdre sa connexion à Altimeter Cloud. Vous devrez vous y connecter via son point d'accès WiFi pour corriger les paramètres.
Puissance TX WiFi
La puissance de transmission de la radio WiFi. Les valeurs plus élevées offrent une meilleure portée mais utilisent plus de batterie.