A maneira mais fácil de configurar seu altímetro é através do Altimeter Cloud. Se ainda não o fez, você pode usar o guia WiFi do Altimeter Cloud para conectar seu dispositivo.
Encontrando a página de configurações do dispositivo
![]()
Clique na aba Meus Dispositivos no topo do site do Altimeter Cloud. Você verá uma lista de dispositivos em sua conta. Clique no botão Configurações no dispositivo que deseja configurar.
Quando você clicar em salvar, as configurações são transmitidas para seu altímetro. Isso normalmente leva de 1 a 4 segundos, desde que seu altímetro esteja ligado e conectado ao WiFi.
As configurações padrão são um ótimo ponto de partida para a maioria dos voos, então não se sinta sobrecarregado pelo número de opções disponíveis. Estas oferecem ajuste avançado e recursos adicionais caso você precise deles. Para a maioria dos voos, o Mercury só precisa ser ligado e está pronto para ir.
Pressão de previsão

A pressão de previsão é a pressão da previsão do tempo ao nível do mar para a localização do seu local de lançamento. O padrão 1013.25 mBar é a média atmosférica. Seu altímetro funcionará bem com esse padrão, porém para maior precisão você deve inserir a pressão de previsão para o dia e hora em que está voando. Faz mais diferença se você está lançando de locais em alta altitude ou em dias com pressão extremamente baixa ou alta.
Um bom site no Reino Unido para procurar essas pressões é xcweather.co.uk.
Detecção de lançamento

A configuração de detecção de lançamento diz ao altímetro até que altura ele deve chegar (altitude de pressão) antes de acionar a detecção de lançamento e começar a registrar. A configuração padrão de 25 metros é perfeita para quase todas as ocasiões. As configurações mais baixas são para voos de muito baixa altitude que podem não alcançar 10 a 20 metros, ou para testar seu dispositivo jogando-o para o ar.
Observação: Os sensores de pressão são sensíveis à luz, então se você montar seu altímetro diretamente em sua baía de eletrônicos ou não usar o case Mercury padrão, você deve tentar garantir que a luz não entre no sensor. Isso aumentará dramaticamente o ruído em suas leituras de altitude.
Observação: Separar seu cone de nariz ou tubo de corpo pode causar uma pressão de vácuo que pode acionar a detecção de lançamento do altímetro. Temos um sistema para proteger contra isso que está ativado por padrão, então também leia sobre o ALP de Lançamento mais adiante na página.
Seu altímetro não usa uma pressão fixa de quando o dispositivo foi ligado como referência para a altitude do pad de lançamento. Em vez disso, ele atualiza constantemente uma média de cerca de 5 a 10 segundos de dados a 50 vezes por segundo. Isso significa que se você ligá-lo mais baixo ou mais alto do que seu pad de lançamento, ou ele ficar por um tempo no seu pad, mudanças na pressão atmosférica não afetarão a precisão dos dados do seu voo.
Velocidade do sensor

O Mercury executa seus sensores a 100Hz por padrão. O que sugerimos seguir por padrão. Você pode reduzir isso para 50Hz se desejar, mas tem muito poucos benefícios além de alguns por cento de mais vida útil da bateria.
Proporção de amostra

O Mercury executa em uma taxa de ciclo de 50Hz ou 100Hz, fazendo leituras dos sensores e fazendo cálculos. Você pode escolher com que frequência registrar essas amostras no registro de voo.
Por padrão, o Mercury registrará cada ciclo, dando a você o máximo de detalhes. Você pode usar essa configuração para registrar a cada 1, 2, 3 ou 4 amostras. Isso permite que você registre por mais tempo dentro do limite de 12.000 amostras por voo.
Os modos híbridos começam com resolução completa 1:1 e depois mudam para uma proporção reduzida dez segundos após apogeu. Isso oferece o máximo de detalhes durante as fases propulsadas e de planejamento, enquanto estende significativamente o tempo de gravação total. Por exemplo, o modo híbrido pode estender a gravação de cerca de 4 minutos para mais de 8 minutos.
Eles também saltam de volta para proporção de amostra 1:1 quando a altitude cai abaixo de 20m na descida para capturar o pouso em velocidade máxima também.
Também é possível usar o sistema de Regras para alterar a taxa de registro após eventos específicos ou tempo. Por exemplo, você poderia configurar uma regra para reduzir a proporção de amostra após apogeu.
Máximo de amostras

A configuração de máximo de amostras é o número de linhas em seu registro de voo ou contagem de amostras quando a gravação parará automaticamente. O máximo é 12.000 amostras por voo, mas se você deseja executar por um tempo fixo, você pode desabilitar a parada automática e definir o máximo de amostras conforme necessário.
Parada de gravação

A parada de gravação determina quando encerrar um registro de voo. A configuração padrão de automático (450 amostras estáveis) será perfeita para a vasta maioria dos voos.
A parada automática analisa as últimas 450 ou 900 amostras e se 98% delas estiverem dentro de uma pequena distância da média recente, o Mercury é considerado imóvel por um tempo significativo e a gravação será interrompida. Há também um modo de parada manual, onde você precisa pressionar o BOTÃO (não o BOTÃO DE ENERGIA) para interromper a gravação.
Uma vez que a gravação é concluída, a luz de status ficará ROSA enquanto os registros de voo são salvos na memória flash. Após isso estar completo, o dispositivo se desligará, então não se preocupe se chegar ao seu foguete e seu dispositivo estiver desligado — ele foi registrado e você não esqueceu de ligá-lo.
Superamostragem

Esta é a configuração para o sensor de pressão BMP390 que diz a ele quantas amostras internas tirar para cada amostra que produz. O BMP390 suporta cerca de 205Hz de amostras. Você deve deixar isso na configuração padrão de 8X. A única vantagem de reduzi-lo é alguns por cento de vida útil adicional da bateria.
A superamostragem permite que o sensor de pressão aumente sua precisão. Cada incremento sem superamostragem aumenta a precisão de saída em 1 bit. Por exemplo, a superamostragem 1x oferece resolução de pressão de 16 bits com cerca de 20cm de resolução de altitude, enquanto a superamostragem 4x oferece 18 bits e cerca de 5cm de resolução.
Versões posteriores da revisão 3 usam um sensor de pressão BMP581 que opera ainda mais rápido e tem uma taxa de superamostragem padrão de 16X. Há muito poucas razões para reduzir isso.
Filtro IIR

O filtro IIR é o segundo filtro interno no sensor de pressão BMP390 ou BMP581. IIR significa Resposta ao Impulso Infinito, e na prática é um filtro eficiente que suaviza múltiplas amostras. Isso ajuda a remover picos repentinos e ruído, como vento entrando no sensor.
Para a maioria dos usos você vai querer que isso seja definido como 1, 3 ou 7, mas sinta-se à vontade para experimentar. Se definido muito alto pode causar problemas com precisão em picos e durante mudanças rápidas de altitude. Configurações altas causarão um pequeno atraso na saída atingindo a altitude real, mas podem oferecer ótimos resultados para itens de movimento lento como balões meteorológicos.

Filtro de pressão (Kalman)

O filtro de pressão é um filtro Kalman que executa no processador em vez do sensor. Você pode escolher entre 4 configurações: DESATIVADO ou três níveis de filtragem. Este é um filtro avançado que estima a pressão real com base em amostras atuais e históricas.
A configuração do meio funciona perfeitamente para a maioria dos voos. Você pode dizer ao filtro para fazer mais ou menos filtragem com as outras opções. Os filtros Kalman são extremamente bons em remover ruído dos dados do sensor, deixando um caminho de altitude muito melhorado e mais realista.
Tempo de bloqueio

O filtro de bloqueio detecta eventos que causam o sensor de pressão ler a altitude errada. Isso pode ser uma carga de ejeção disparando, o que aumenta a pressão dentro do foguete e faz o sensor pensar que houve uma queda repentina de altitude. Outra causa comum é foguetes entrando em velocidades supersônicas, que também causa interrupção de pressão.
Esta configuração controla por quanto tempo o dispositivo deve se bloquear de tomar decisões sobre saídas e outros cálculos quando detecta um desses eventos. O padrão de 500ms funciona bem para a maioria das situações.
Alteração de bloqueio

A detecção de bloqueio funciona detectando se a altitude caiu tão rapidamente que excede esse valor entre uma amostra única. Embora esses valores pareçam pequenos, lembre-se de que está funcionando a 50 amostras por segundo (o valor é duplicado automaticamente no modo 16 amostras por segundo).
Uma queda de 1,5m entre amostras é o equivalente a cair a 48 metros por segundo ou cerca de 107 mph — que sob operação normal seu foguete não deve estar alcançando em uma direção descendente.
Sincronizar sensores

Diferentes sensores têm filtros diferentes e isso pode causar uma pequena quantidade de atraso nos dados de um sensor versus outro. O resultado é que diferentes sensores estarão levemente fora de sincronismo um com o outro.
Esta configuração habilita o algoritmo de re-sincronização. Ele procura para trás quando o lançamento é detectado no evento de lançamento provável em cada sensor. Ele então desloca os dados de cada sensor no buffer em relação ao sensor de pressão para ressincronizá-los. Recomenda-se deixar habilitado.
Filtro IMU

O filtro IMU funde os dados de 6 eixos do giroscópio e acelerômetro para calcular ângulos como pitch, roll, yaw e ângulo de inclinação a partir da vertical. O filtro Madgwick usa um pouco mais de poder de processamento, mas é mais preciso do que o filtro Mahony.
O Mercury não possui um magnetômetro para fusão de 9 eixos, então pequenos erros se acumularão ao longo do tempo. De nossos testes, estes são muito pequenos e o filtro oferece ótimos dados durante a duração de um voo de foguete padrão.
Para obter os melhores resultados, você deve calibrar seus sensores e montar seu altímetro em uma das orientações suportadas.
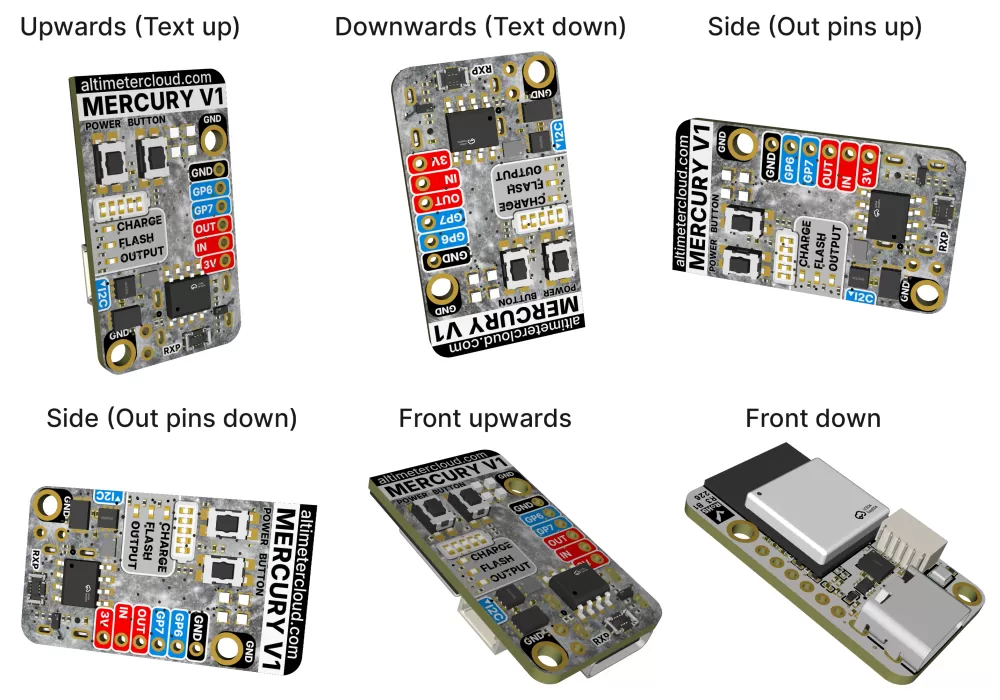
Orientação

A configuração de orientação diz ao altímetro de qual forma você planeja instalá-lo. Embora ele possa descobrir isso por si mesmo, essa configuração garante que o filtro IMU receba os dados corretos do eixo na ordem correta para cálculos de ângulo precisos. O padrão é vertical com a porta USB apontando para baixo.
ALP de Lançamento (Prevenção de Lançamento Acidental)

Esta configuração ajuda a prevenir detecção de lançamento acidental. Sem ALP, o altímetro depende unicamente do sensor de pressão e da altitude que ele indica. Isso significa que rajadas fortes de vento, ou até mesmo puxar seu cone de nariz, poderiam causar uma mudança de pressão grande o suficiente para acionar a detecção de lançamento.
Com ALP habilitado, o altímetro usa tanto o sensor de pressão quanto o acelerômetro para verificar o lançamento. Para acionar, o altímetro precisa ver 8 amostras nos últimos 3 segundos acima do nível de aceleração G definido, bem como a altitude excedendo o limite de detecção de lançamento.
Há também um gatilho de backup: uma vez que o altímetro esteja acima do limite de lançamento por 1,05 segundos, ele acionará a detecção de lançamento independentemente. Isso garante que lançamentos genuinamente lentos ainda sejam detectados.
Bloqueio de lançamento

Esta configuração impede que o altímetro detecte um lançamento sob qualquer circunstância até que o tempo especificado tenha decorrido desde que você ligou o Mercury. Por exemplo, se você definir isso como 180 segundos (3 minutos), seu altímetro aguardará até que esse tempo tenha decorrido antes de procurar detecção de lançamento. Para a maioria dos usos, é melhor deixar isso definido como 0.
Temperatura estática

Ao calcular altitude a partir da pressão, a equação usa tanto a configuração de pressão de previsão quanto esta configuração de temperatura estática. Os padrões são respectivamente 1013.25 mBar e 15.0°C.
Se você alterar esses valores para valores reais no dia do seu voo, você obterá os cálculos de altitude mais precisos.
Sensor de temperatura

O sensor de temperatura integrado será afetado pelo próprio calor da placa e pelo fato de que o interior do seu foguete provavelmente não reflete a temperatura externa. Você pode conectar um de nossos pequenos sensores de temperatura MT1 à porta de expansão I2C em seu Mercury para uma leitura muito mais precisa (precisão de 0,1°C).
Uma vez conectado, você pode escolher registrar a temperatura do MT1 em seu registro de voo, ou registrá-la e usá-la como a temperatura estática no lançamento para cálculos de altitude.
Se você planeja usá-lo como sua temperatura estática, tome cuidado para instalar o sensor de forma que ele possa amostrar a temperatura fora do seu foguete no lado sombreado enquanto está no pad de lançamento, e idealmente isolá-lo de qualquer calor interno.
Saída #1

O Mercury tem uma saída de alta corrente integrada que pode ser usada para disparar cargas de deployment pirotécnicas, ativar um buzzer, ou dirigir outras cargas. A saída precisa ser fornecida com uma bateria externa com uma faixa de tensão de 4V a 22V e é limitada em corrente a um máximo de 10–12 Amperes.
Os pontos de conexão no PCB do Mercury são um espaçamento de 2mm, então você poderia potencialmente soldar pinos de cabeçalho ou um bloco de terminal PCB, bem como fios diretos.
Observação: Se você soldar na placa, você não poderá devolver o dispositivo dentro do período de retorno de 14 dias, embora isso não afete sua garantia para defeitos.
Saída habilitada
Use essa opção para habilitar ou desabilitar a saída. Se desabilitada, a saída não será ativada sob qualquer circunstância. Este é um recurso de segurança — sempre deixe desabilitado a menos que você tenha uma necessidade específica e tenha testado sua configuração.
Gatilho de saída
Esta configuração controla qual evento dispara a saída. As opções disponíveis são:
- Após Apogeu (altitude) — dispara quando a altitude cai abaixo de um valor especificado após apogeu. Por exemplo, se você definir 200 metros, a saída disparará quando o foguete descer para 200 metros abaixo de apogeu.
- Após Apogeu (tempo) — dispara um número especificado de segundos após o apogeu ser detectado.
- Após Lançamento (altitude) — dispara quando o foguete atinge uma altitude especificada durante a subida.
- Após Lançamento (tempo) — dispara um número especificado de segundos após a detecção do lançamento.
- Após Queima (tempo) — dispara um número especificado de segundos após a detecção da queima do motor.
- Pouso — dispara quando o pouso é detectado.
Tempo ligado
Esta configuração controla quanto tempo a saída permanece ativa uma vez acionada, em segundos. Para cargas de deployment, isso geralmente é mantido curto (0,5 a 2 segundos). Se você precisar que a saída permaneça ligada durante todo o voo (por exemplo, acionando um buzzer), defina isso para um valor alto.
Altitude (metros)
Este valor é usado se você escolher um gatilho que funcione em altitude. Se você selecionar "Após Apogeu (altitude)", ele disparará após apogeu quando a altitude cair abaixo do número que você escolher. Se você selecionar "Após Lançamento (altitude)", a saída disparará assim que a altitude atingir o valor que você define durante a subida.
Tempo (segundos)
Este é o atraso de tempo para sua opção de gatilho escolhida. Se você selecionar "Após Apogeu (tempo)", a saída disparará muitos segundos após apogeu. Se você selecionar "Após Lançamento (tempo)", ela disparará muitos segundos após a detecção do lançamento. O mesmo se aplica para a opção de queima.
Bloqueio de altitude
Esta configuração de segurança impede que a saída seja ativada se o foguete estiver dentro dessa altitude do pad de lançamento. Isso protege contra a saída disparar enquanto o foguete ainda está no chão ou perto dele, por exemplo durante um lançamento abortado ou um voo muito curto.
Bloqueio de ângulo de inclinação
Esta configuração de segurança impede que a saída dispare se o ângulo de inclinação está fora dessa quantidade a partir da vertical. Isto é particularmente importante para cargas de deployment — se seu foguete virou significativamente, você pode não querer que ele dispare uma carga de deployment de pára-quedas apontando para os lados ou para baixo.
TAG do dispositivo

O TAG do dispositivo se encontra na aba de configurações Gerais. Isso permite que você configure um nome ou tag para seu dispositivo. Todos os voos carregados receberão o tag que você definir, para que você possa alterá-lo conforme necessário. Você pode então procurar no Altimeter Cloud pelo seu tag para encontrar voos específicos. Útil se você tem vários altímetros Mercury ou quer etiquetar voos para foguetes específicos.
Grupo

A opção Grupo permite que você selecione grupos padrão para adicionar seu voo neles se aplicável e você deseja acompanhar entre outros voos.
Brilho do LED

Os LEDs integrados são brilhantes e se você não precisar deles no brilho máximo, você pode economizar energia e reduzir calor reduzindo o brilho. Nossa configuração padrão é 20% e achamos que é adequado para a maioria dos usos.
Barra de bateria

Da revisão de hardware 2 em diante, há uma barra de bateria com 5 LEDs na placa. Isso permanece constantemente ligado durante o modo USB para mostrar o estado de carga.
Durante o modo de voo, para minimizar o uso de energia, existem 3 opções:
Piscar 1 LED (padrão) — apenas pisca o LED único do estado atual a cada poucos segundos.
Piscar 5 LEDs — pisca o estado da bateria como uma barra convencional com todos os LEDs até o estado atual iluminado a cada poucos segundos.
Apenas botão — mostra apenas o estado da bateria no modo de voo quando você pressiona o botão, por um curto período.
Modo de potência inteligente (eMode)
Modo de economia de energia enquanto aguarda no pad de lançamento. Existem duas opções:
eMode 1 — executa sensores a 50Hz e muda para velocidade máxima na detecção de movimento. Um bom equilíbrio de capacidade de resposta e economia de energia.
eMode 2 — a CPU acorda a 25Hz e lê em lote dados IMU do FIFO do sensor. Os sensores permanecem a 52Hz em modo de baixa potência. Isso reduz pela metade o ciclo de trabalho da CPU para menor consumo de energia no pad. A barra de bateria é desabilitada e o LED de status pisca a cada 8 segundos em vez de estar constantemente ativo. Muda para velocidade máxima na detecção de movimento.
Requer firmware 2.3 ou posterior.
eNOW
O eNOW permite que seu Mercury transmita pings de curto alcance após um voo ser salvo, transmitindo informações como sua altitude de apogeu e nível de bateria. O alcance é aproximadamente 80 a 300 metros dependendo das condições e orientação de pouso. Requer firmware 2.2 ou posterior.
eNOW: Habilitar — liga ou desliga o transmissor eNOW.
eNOW: Intervalo — controla com que frequência os pings são transmitidos.
eNOW: Inicialização — (em breve) este recurso transmitirá o resumo do seu voo mais recente quando ligado, permitindo que outros dispositivos recebam dados de voo.
Desligar WiFi

Isso diz ao altímetro para não permanecer ligado indefinidamente quando em modo WiFi / Configurações. Após o tempo definido seu dispositivo será desligado. É fácil ligar novamente e rápido reconectar ao Altimeter Cloud caso você precise atualizar todas as configurações novamente mais tarde.
UART

Esta configuração habilita um UART Serial que transmite dados do sensor e informações a 50Hz nos pads de solda GP6 e GP7. Quando habilitado, você não poderá usar esses pads para servos ou outras saídas.
O UART executa a 921600 baud, 8 bits com 1 bit de parada para maximizar a vida útil da bateria. GP6 é o pino TX (conecte ao seu RX) e GP7 é o pino RX (conecte ao seu TX). Você verá uma queda de cerca de 5% na vida útil da bateria ao usar o modo UART.
Aviso: O UART executa em modo 3.3V. Por favor, não transmita para o dispositivo, pois não serve nenhuma função, e especialmente não envie um sinal de 5V, pois isso pode danificar seu Mercury.
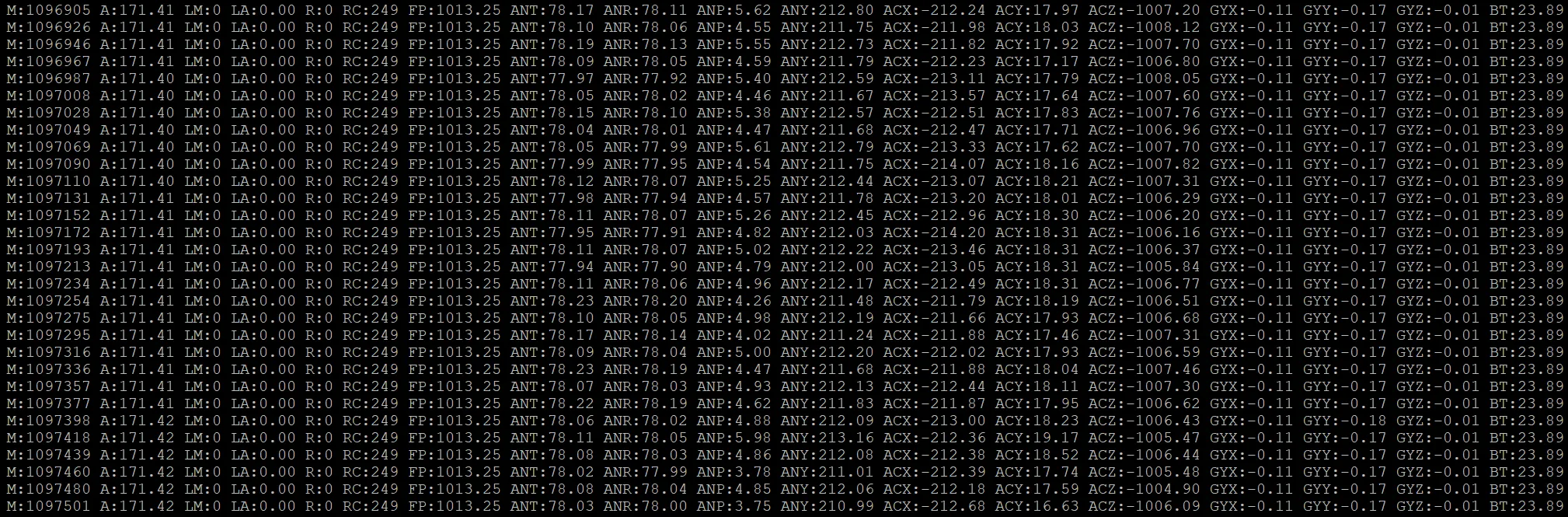
As variáveis de saída de transmissão são:
M: Milissegundos desde que o Mercury foi ligado.
A: Altitude atual em metros.
LM: Milissegundos quando o foguete deixou o pad (se lançamento detectado).
LA: Altitude do pad no lançamento. Subtraia da altitude atual para altura de voo ao vivo.
R: 1 se o dispositivo está gravando.
RC: Número de amostras no registro de voo (mostra 249 quando não está gravando — este é o buffer rolante pré-voo).
FP: Pressão de previsão sendo usada.
ANT: Ângulo de inclinação a partir da vertical (graus).
ANR: Ângulo de roll (graus).
ANP: Ângulo de pitch (graus).
ANY: Ângulo de yaw (graus).
ACX/ACY/ACZ: Aceleração para cada eixo (-32000 a +32000 mG).
GYX/GYY/GYZ: Giroscópio para cada eixo (-2000 a +2000 dps).
BT: Temperatura da placa do sensor de pressão.
MT1: Leitura do sensor de temperatura MT1 (se conectado).
Idioma do dispositivo

Isso define o idioma nativo da interface do dispositivo, usado para o servidor web do dispositivo e conexão de ponto de acesso. Vários idiomas são oferecidos e mais podem ser adicionados em firmware futuro.
Calibração do sensor

Para os dados mais precisos, recomendamos calibrar seus sensores. Marque a caixa de calibração e salve — a calibração será executada na próxima vez que o dispositivo entrar no modo de voo.
Há uma página dedicada cobrindo o processo de calibração: Ver guia de calibração
Suporte a servo (GP6 & GP7)

O Mercury tem dois pads de solda de propósito geral (GP6 e GP7) que podem ser configurados como uma saída HIGH/LOW padrão ou uma saída de sinal de servo. Quando configurado como servo, você pode definir as larguras de pulso mín/máx, frequência, ângulos ON/OFF e tempo de retenção. Essas saídas são controladas através do sistema de regras de ação. Requer firmware 2.0 ou posterior.
Há uma página dedicada cobrindo a configuração de servo: Ver guia de configuração de servo
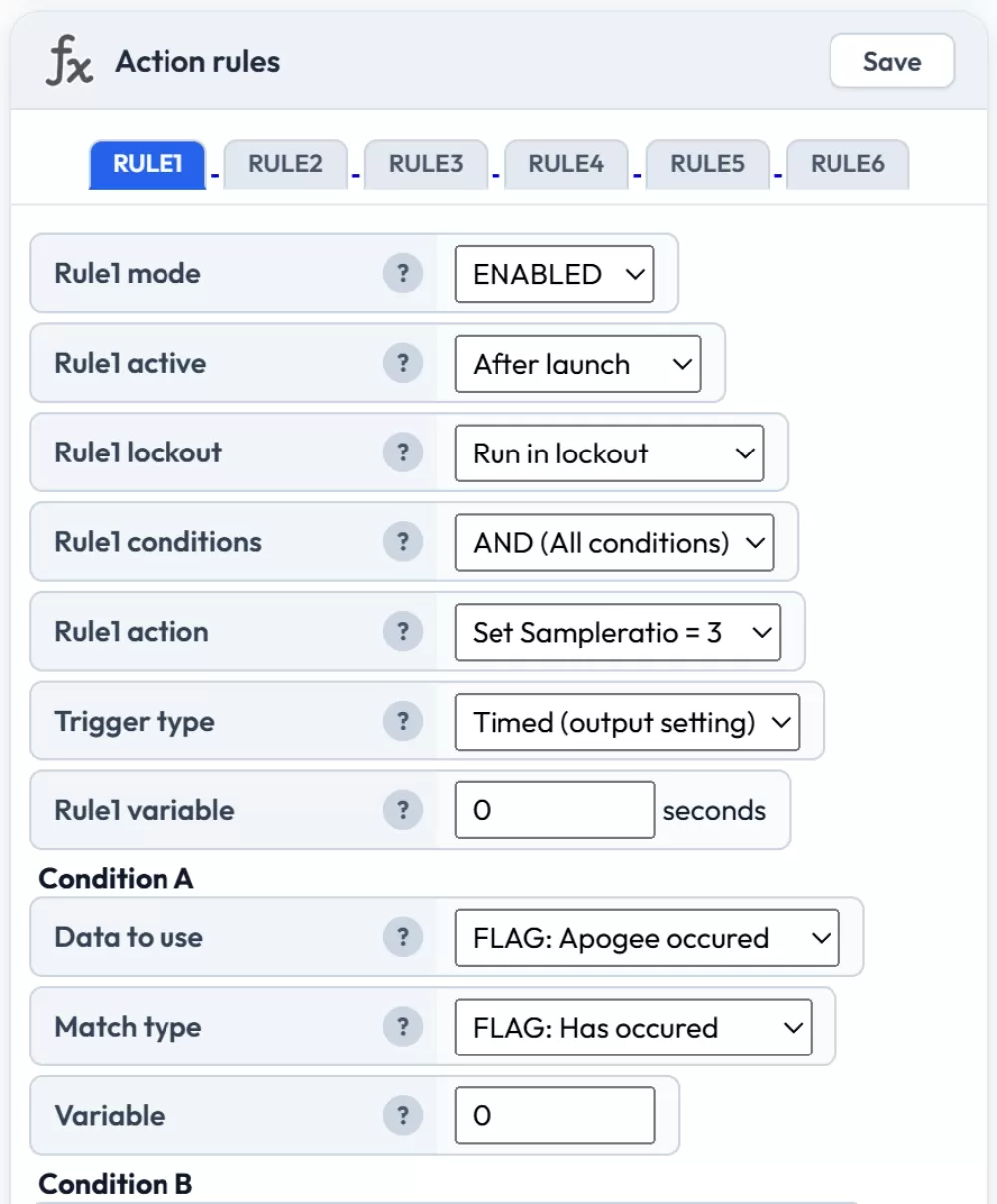
Regras de ação

O sistema de regras é o recurso mais poderoso do Mercury. Você pode criar até 6 regras independentes, cada uma com até 4 condições que devem ser atendidas antes da ação ser acionada. As regras podem controlar saídas, servos, proporções de amostra e muito mais.
Há uma página dedicada cobrindo o sistema de regras de ação com exemplos: Ver guia de regras de ação
Previsão & freios de ar

O Mercury pode prever altitude de apogeu durante a fase de planejamento após a queima do motor. Esta informação aparece em seus gráficos de voo e também pode ser usada para acionar um sistema ativo de freio de ar. Requer firmware 2.1 ou posterior.
Há uma página dedicada cobrindo previsão e freios de ar: Ver guia de previsão e freios de ar
Placa de saída de alta corrente ROC2
O ROC2 é uma placa de expansão que fornece duas saídas de alta corrente adicionais. Habilite a placa nas configurações e configure cada canal de saída com as mesmas opções de gatilho disponíveis para Saída #1. As saídas ROC2 também podem ser controladas através do sistema de regras de ação usando as ações ROC2 OUT1 e ROC2 OUT2.
Se a placa ROC2 estiver habilitada nas configurações, mas não for detectada fisicamente ao entrar no modo de voo, o LED de status piscará em vermelho por 5 segundos como aviso.
Placa de expansão de servo I2C PCA9685
Você pode conectar uma placa de expansão de servo baseada em I2C PCA9685 ao seu Mercury, fornecendo até 6 canais de servo adicionais. Esses servos são controlados através do sistema de regras de ação, permitindo configurações complexas de vários servos para freios de ar, controle de aletas, deployment de carga ou outros mecanismos. Requer firmware 2.0 ou posterior.
As configurações incluem o alternância de habilitação da placa, frequência do oscilador (padrão 25 MHz — ajuste apenas se sua placa usar um cristal diferente) e configuração individual de servo para cada um dos 6 canais, incluindo largura de pulso mín/máx e frequência.
Configurações WiFi
Você pode configurar até 4 redes WiFi. O dispositivo se conectará a qualquer rede salva que tenha o sinal mais forte. Isso é útil para ter seu WiFi doméstico, um hotspot móvel para o campo, e talvez o WiFi do seu local de lançamento do clube, todos salvos.
As configurações de WiFi não entram em vigor até a próxima vez que o WiFi começar. Você pode desencadear isso desconectando e reinserindo o cabo USB-C ou desligando e ligando o dispositivo novamente.
Aviso: Se você inserir credenciais WiFi incorretas, seu dispositivo poderá perder sua conexão com o Altimeter Cloud. Você precisará se conectar a ele através de seu ponto de acesso WiFi para corrigir as configurações.
Potência de transmissão WiFi
A potência de transmissão do rádio WiFi. Valores mais altos fornecem melhor alcance, mas usam mais bateria.