La forma más fácil de configurar tu altímetro es a través de Altimeter Cloud. Si aún no lo has hecho, puedes usar la guía de WiFi de Altimeter Cloud para conectar tu dispositivo.
Encontrar la página de configuración del dispositivo
![]()
Haz clic en la pestaña Mis Dispositivos en la parte superior del sitio web de Altimeter Cloud. Verás una lista de dispositivos en tu cuenta. Haz clic en el botón Configuración en el dispositivo que deseas configurar.
Cuando hagas clic en guardar, la configuración se transmite a tu altímetro. Esto típicamente toma de 1 a 4 segundos mientras tu altímetro esté encendido y conectado a WiFi.
La configuración predeterminada es un excelente punto de partida para la mayoría de los vuelos, así que no te abrumes por la cantidad de opciones disponibles. Estas ofrecen ajustes avanzados y características adicionales si las necesitas. Para la mayoría de los vuelos, el Mercury solo necesita estar encendido y está listo para funcionar.
Presión del pronóstico

La presión del pronóstico es la presión del pronóstico meteorológico a nivel del mar para la ubicación de tu sitio de lanzamiento. El estándar predeterminado es 1013.25 mBar, que es el promedio atmosférico. Tu altímetro funcionará bien con este valor predeterminado, sin embargo, para la máxima precisión deberías ingresar la presión del pronóstico para el día y la hora en que vuelas. Hace más diferencia si estás lanzando desde sitios de alta altitud o en días con presión extremadamente baja o alta.
Un buen sitio web en el Reino Unido para buscar estas presiones es xcweather.co.uk.
Detección de lanzamiento

La configuración de detección de lanzamiento le indica al altímetro qué altura debe alcanzar (altitud de presión) antes de activar la detección de lanzamiento y comenzar a grabar. La configuración predeterminada de 25 metros es perfecta para casi todas las ocasiones. Las configuraciones más bajas son para vuelos de muy baja altitud que podrían no alcanzar 10 a 20 metros, o para probar tu dispositivo lanzándolo al aire.
Nota: Los sensores de presión son sensibles a la luz, así que si montas tu altímetro directamente en tu compartimento de electrónica o no usas el estuche Mercury predeterminado, deberías intentar asegurar que la luz no pueda entrar en el sensor. Aumentará dramáticamente el ruido en tus lecturas de altitud.
Nota: Separar tu ojiva o tubo de fuselaje puede causar una presión de vacío que podría activar la detección de lanzamiento del altímetro. Tenemos un sistema para proteger contra esto que está activado por defecto, así que también lee sobre Launch ALP más abajo en la página.
Tu altímetro no usa una presión fija desde cuando se encendió el dispositivo como referencia para la altitud de la plataforma de lanzamiento. En su lugar, actualiza constantemente un promedio de alrededor de 5 a 10 segundos de datos a 50 veces por segundo. Esto significa que si lo enciendes más bajo o más alto que tu plataforma de lanzamiento, o se queda por un tiempo en tu plataforma, los cambios en la presión atmosférica no afectarán la precisión de tus datos de vuelo.
Velocidad del sensor

El Mercury ejecuta sus sensores a 100Hz por defecto. Lo cual sugerimos mantener por defecto. Puedes reducir esto a 50Hz si quieres pero tiene muy pocos beneficios excepto un pequeño porcentaje más de duración de la batería.
Relación de muestreo

El Mercury funciona a una velocidad de ciclo de 50Hz o 100Hz tomando lecturas de los sensores y realizando cálculos. Puedes elegir con qué frecuencia registrar estas muestras en el registro de vuelo.
Por defecto, el Mercury registrará cada ciclo, brindándote el máximo detalle. Puedes usar esta configuración para registrar cada 1, 2, 3 o 4 muestras en su lugar. Esto te permite grabar más tiempo dentro del límite de 12,000 muestras por vuelo.
Los modos híbridos comienzan a resolución completa de 1:1 y luego cambian a una proporción reducida diez segundos después del apogeo. Esto te brinda el máximo detalle durante las fases de motor encendido y planeo mientras extiende significativamente el tiempo total de grabación. Por ejemplo, el modo híbrido puede extender la grabación de alrededor de 4 minutos a más de 8 minutos.
También saltan de vuelta a la relación de muestreo de 1:1 cuando la altitud cae por debajo de 20m en el descenso para capturar el aterrizaje a velocidad completa también.
También es posible usar el sistema de Reglas para cambiar la velocidad de registro después de eventos específicos o tiempo. Por ejemplo, podrías configurar una regla para reducir la relación de muestreo después del apogeo.
Máximo de muestras

La configuración de máximo de muestras es el número de líneas en tu registro de vuelo o conteo de muestras cuando la grabación se detendrá automáticamente. El máximo es 12000 muestras por vuelo, pero si deseas ejecutar durante un tiempo fijo puedes desactivar la parada automática y configurar el máximo de muestras según sea necesario.
Parada de grabación

La parada de grabación determina cuándo finalizar un registro de vuelo. La configuración predeterminada de auto (450 muestras estables) será perfecta para la gran mayoría de vuelos.
La parada automática analiza las últimas 450 o 900 muestras y si el 98% de estas están dentro de una pequeña distancia del promedio reciente, el Mercury se considera que ha dejado de moverse durante un tiempo significativo y la grabación se detendrá. También hay un modo de parada manual, donde necesitas presionar el BOTÓN (no el BOTÓN DE ENCENDIDO) para detener la grabación.
Una vez que una grabación termina, la luz de estado se pondrá ROSA mientras los registros de vuelo se guardan en la memoria flash. Después de que esto se complete, el dispositivo se apagará automáticamente, así que no entres en pánico si llegas a tu cohete y tu dispositivo está apagado — ha grabado y no olvidaste encenderlo.
Sobremuestreo

Esta es la configuración para el sensor de presión BMP390 que le indica cuántas muestras internas debe tomar para cada muestra que genera. El BMP390 soporta hasta alrededor de 205Hz de muestras. Deberías dejar esto en la configuración predeterminada de 8X. La única ventaja de reducirlo es un pequeño porcentaje adicional de duración de la batería.
El sobremuestreo permite al sensor de presión aumentar su precisión. Cada incremento desde sin sobremuestreo aumenta la precisión de salida en 1 bit. Por ejemplo, el sobremuestreo 1x ofrece resolución de presión de 16 bits con alrededor de 20cm de resolución de altitud, mientras que el sobremuestreo 4x ofrece 18 bits y alrededor de 5cm de resolución.
Las revisiones posteriores desde la revisión 3 usan un sensor de presión BMP581 que funciona aún más rápido y tiene una velocidad de sobremuestreo predeterminada de 16X. Realmente hay pocas razones para disminuir esto.
Filtro IIR

El filtro IIR es el segundo filtro interno en el sensor de presión BMP390 o BMP581. IIR significa Respuesta de Impulso Infinito, y en la práctica es un filtro eficiente que suaviza múltiples muestras. Esto ayuda a eliminar picos repentinos y ruido como viento que sopla en el sensor.
Para la mayoría de usos querrás esto configurado en 1, 3 o 7, pero siéntete libre de experimentar. Si se configura demasiado alto puede causar problemas con precisión en picos y durante cambios de altitud rápidos. Las configuraciones altas causarán un ligero retraso en la salida alcanzando la altitud real, pero pueden ofrecer excelentes resultados para elementos que se mueven lentamente como globos meteorológicos.

Filtro de presión (Kalman)

El filtro de presión es un filtro de Kalman que se ejecuta en el procesador en lugar de en el sensor. Puedes elegir entre 4 configuraciones: APAGADO o tres niveles de filtrado. Este es un filtro avanzado que estima la presión real basándose en muestras actuales e históricas.
La configuración intermedia funciona perfectamente para la mayoría de vuelos. Puedes indicarle al filtro que haga más o menos filtrado con las otras opciones. Los filtros de Kalman son extremadamente buenos para eliminar ruido de datos del sensor, dejando una trayectoria de altitud mucho más mejorada y realista.
Tiempo de bloqueo

El filtro de bloqueo detecta eventos que hacen que el sensor de presión lea la altitud incorrecta. Esto podría ser una carga de expulsión que se dispara, lo cual aumenta la presión dentro del cohete y hace que el sensor piense que ha habido una caída repentina en la altitud. Otra causa común es que los cohetes entren en velocidades supersónicas, lo cual también causa disrupción de presión.
Esta configuración controla cuánto tiempo el dispositivo debe bloquearse a sí mismo de tomar decisiones en salidas y otros cálculos cuando detecta uno de estos eventos. El valor predeterminado de 500ms funciona bien para la mayoría de situaciones.
Cambio de bloqueo

La detección de bloqueo funciona detectando si la altitud ha caído tan rápidamente que excede esta cantidad entre una sola muestra. Aunque estos valores parecen pequeños, recuerda que está funcionando a 50 muestras por segundo (el valor se duplica automáticamente en modo de 16 muestras por segundo).
Una caída de 1.5m entre muestras es equivalente a caer a 48 metros por segundo o alrededor de 107 mph — lo cual bajo operación normal tu cohete no debería estar logrando en dirección descendente.
Sincronizar sensores

Los diferentes sensores tienen diferentes filtros y esto puede causar una pequeña cantidad de retraso en los datos de un sensor versus otro. El resultado es que diferentes sensores estarán ligeramente fuera de sincronización el uno con el otro.
Esta configuración habilita el algoritmo de re-sincronización. Mira hacia atrás cuando se detecta el lanzamiento el evento de lanzamiento probable en cada sensor. Luego desplaza los datos de cada sensor en el búfer relativo al sensor de presión para resincronizarlos. Se recomienda dejar habilitado.
Filtro IMU

El filtro IMU fusiona los datos de 6 ejes del giroscopio y acelerómetro para calcular ángulos como cabeceo, alabeo, guiñada y el ángulo de inclinación desde la vertical. El filtro Madgwick usa ligeramente más potencia de procesamiento pero es más preciso que el filtro Mahony.
El Mercury no tiene un magnetómetro para fusión de 9 ejes, así que pequeños errores se acumularán con el tiempo. De nuestras pruebas estos son muy pequeños y el filtro ofrece excelentes datos durante la duración de un vuelo de cohete estándar.
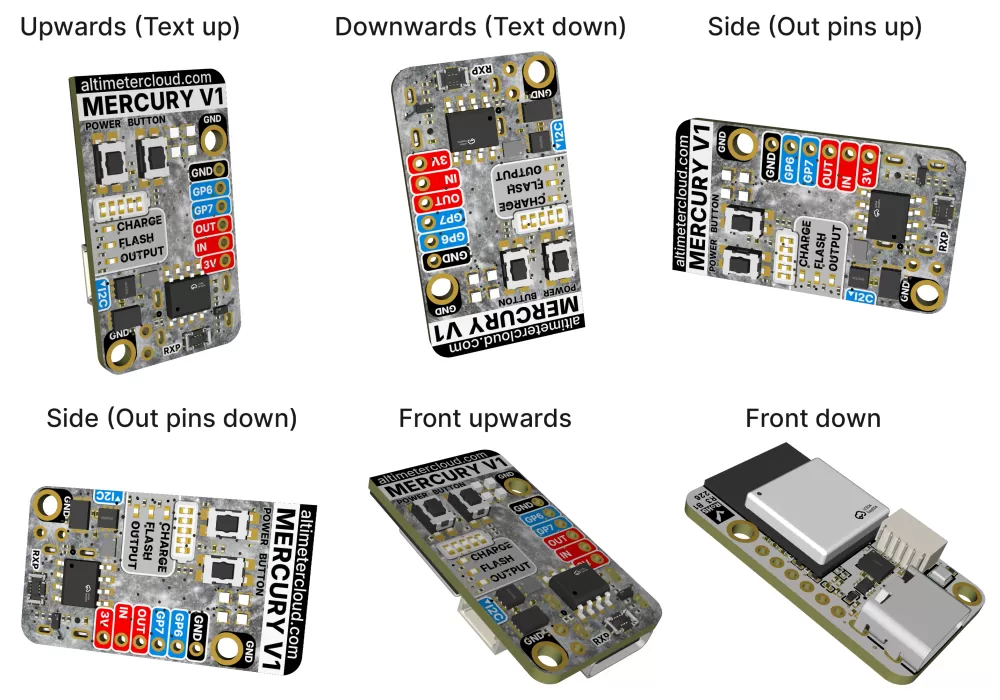
Para obtener los mejores resultados deberías calibrar tus sensores y montar tu altímetro en una de las orientaciones soportadas.
Orientación

La configuración de orientación le indica al altímetro de qué manera planeas instalarlo. Aunque puede averiguarlo por sí mismo, esta configuración asegura que el filtro IMU reciba los datos del eje correcto en el orden correcto para cálculos de ángulo precisos. El valor predeterminado es erguido con el puerto USB apuntando hacia abajo.
Launch ALP (Prevención de Lanzamiento Accidental)

Esta configuración ayuda a prevenir la detección de lanzamiento accidental. Sin ALP, el altímetro se basa únicamente en el sensor de presión y la altitud que indica. Esto significa que fuertes ráfagas de viento, o incluso tirar de tu ojiva, podrían causar un cambio de presión lo suficientemente grande como para activar la detección de lanzamiento.
Con ALP habilitado, el altímetro usa tanto el sensor de presión como el acelerómetro para verificar el lanzamiento. Para activarse, el altímetro necesita ver 8 muestras en los últimos 3 segundos por encima del nivel de aceleración G establecido además de que la altitud exceda el umbral de detección de lanzamiento.
También hay un disparador de respaldo: una vez que el altímetro ha estado por encima del umbral de lanzamiento durante 1.05 segundos activará la detección de lanzamiento independientemente. Esto asegura que los lanzamientos genuinamente lentos aún sean detectados.
Bloqueo de lanzamiento

Esta configuración evita que el altímetro detecte un lanzamiento bajo ninguna circunstancia hasta que el tiempo especificado haya pasado desde que encendiste el Mercury. Por ejemplo, si estableces esto en 180 segundos (3 minutos) entonces tu altímetro esperará hasta que este tiempo haya transcurrido antes de buscar detección de lanzamiento. Para la mayoría de usos es mejor dejar esto configurado en 0.
Temperatura estática

Al calcular la altitud a partir de la presión, la ecuación usa tanto la configuración de presión del pronóstico como esta configuración de temperatura estática. Los valores predeterminados son 1013.25 mBar y 15.0°C respectivamente.
Si cambias estos a valores reales en el día de tu vuelo obtendrás los cálculos de altitud más precisos.
Sensor de temperatura

El sensor de temperatura a bordo será afectado por el calor de la placa y el hecho de que el interior de tu cohete es improbable que refleje la temperatura externa. Puedes conectar uno de nuestros pequeños sensores de temperatura MT1 al puerto de expansión I2C en tu Mercury para una lectura mucho más precisa (precisión de 0.1°C).
Una vez conectado, puedes elegir registrar la temperatura MT1 en tu registro de vuelo, o ambos registrarla y usarla como la temperatura estática al lanzamiento para cálculos de altitud.
Si planeas usarlo como tu temperatura estática, ten cuidado de instalar el sensor para que pueda muestrear la temperatura fuera de tu cohete en el lado sombreado mientras está en la plataforma de lanzamiento, e idealmente aislarlo del calor interno.
Salida #1

El Mercury tiene una salida de alta corriente a bordo que puede usarse para activar cargas de despliegue pirotécnico, activar un zumbador u otros circuitos. La salida necesita ser suministrada con una batería externa con un rango de voltaje de 4V a 22V y está limitada en corriente a un máximo de 10–12 Amperios.
Los puntos de conexión en la PCB del Mercury tienen un paso de 2mm, así que potencialmente podrías soldar pines de encabezado o un bloque terminal PCB así como cables directos.
Nota: Si soldas en la placa no podrás devolver el dispositivo dentro del período de devolución de 14 días, aunque esto no afecta tu garantía por defectos.
Salida habilitada
Usa esta opción para habilitar o deshabilitar la salida. Si está deshabilitada, la salida no se activará bajo ninguna circunstancia. Esta es una característica de seguridad — siempre déjala deshabilitada a menos que tengas una necesidad específica y hayas probado tu configuración.
Disparador de salida
Esta configuración controla qué evento activa la salida. Las opciones disponibles son:
- Después del Apogeo (altitud) — se activa cuando la altitud cae por debajo de un valor especificado después del apogeo. Por ejemplo, si estableces 200 metros, la salida se activará cuando el cohete descienda a 200 metros por debajo del apogeo.
- Después del Apogeo (tiempo) — se activa un número especificado de segundos después de que se detecta el apogeo.
- Después del Lanzamiento (altitud) — se activa cuando el cohete alcanza una altitud especificada durante el ascenso.
- Después del Lanzamiento (tiempo) — se activa un número especificado de segundos después de que se detecta el lanzamiento.
- Después del Agotamiento del Motor (tiempo) — se activa un número especificado de segundos después de que se detecta el agotamiento del motor.
- Aterrizaje — se activa cuando se detecta el aterrizaje.
Tiempo activado
Esta configuración controla cuánto tiempo la salida permanece activa una vez activada, en segundos. Para cargas de despliegue esto típicamente se mantiene corto (0.5 a 2 segundos). Si necesitas que la salida permanezca activada durante todo el vuelo (por ejemplo impulsando un zumbador), establece esto en un valor alto.
Altitud (metros)
Este valor se usa si eliges un disparador que funcione con altitud. Si seleccionas "Después del Apogeo (altitud)" se activará después del apogeo cuando la altitud caiga por debajo del número que elijas. Si seleccionas "Después del Lanzamiento (altitud)" entonces la salida se activará una vez que la altitud alcance el valor que estableces durante el ascenso.
Tiempo (segundos)
Este es el retraso de tiempo para tu opción de disparador elegida. Si seleccionas "Después del Apogeo (tiempo)" la salida se activará este número de segundos después del apogeo. Si seleccionas "Después del Lanzamiento (tiempo)" se activará este número de segundos después de que se detecte el lanzamiento. Lo mismo aplica para la opción de agotamiento.
Bloqueo de altitud
Esta configuración de seguridad evita que la salida se active si el cohete está dentro de esta altitud de la plataforma de lanzamiento. Esto protege contra que la salida se active mientras el cohete aún está en o cerca del suelo, por ejemplo durante un lanzamiento abortado o vuelo muy corto.
Bloqueo de ángulo de inclinación
Esta configuración de seguridad evita que la salida se active si el ángulo de inclinación está fuera de esta cantidad desde la vertical. Esto es particularmente importante para cargas de despliegue — si tu cohete se ha inclinado significativamente, es posible que no quieras que active una carga de despliegue de paracaídas apuntando hacia un lado o hacia abajo.
Etiqueta del Dispositivo

La Etiqueta del Dispositivo se encuentra bajo la pestaña de configuración General. Esto te permite configurar un nombre o etiqueta para tu dispositivo. Todos los vuelos cargados se asignarán a la etiqueta que establezcas, así que puedes cambiarla según sea necesario. Luego puedes buscar en Altimeter Cloud tu etiqueta para encontrar vuelos específicos. Útil si tienes múltiples altímetros Mercury o quieres etiquetar vuelos para cohetes específicos.
Grupo

La opción de Grupo te permite seleccionar grupos estándar para añadir tu vuelo en ellos si es aplicable y quieres mantener un registro entre otros vuelos.
Brillo del LED

Los LEDs a bordo son brillantes y si no los necesitas al brillo máximo puedes ahorrar energía y calor residual atenuándolos. Nuestra configuración predeterminada es 20% y creemos que esto es suficiente para la mayoría de usos.
Barra de batería

Desde la revisión de hardware 2 hay una barra de batería de 5 LEDs en la placa. Esto está permanentemente activado durante el modo USB para mostrar el estado de carga.
Durante el modo de vuelo, para minimizar el uso de energía, hay 3 opciones:
Parpadeo de 1 LED (predeterminado) — solo parpadea el LED individual del estado actual cada pocos segundos.
Parpadeo de 5 LEDs — parpadea el estado de la batería como una barra convencional con todos los LEDs hasta el estado actual iluminados cada pocos segundos.
Solo botón — solo muestra el estado de la batería en modo de vuelo cuando presionas el botón, por un corto período.
Modo de potencia inteligente (eMode)
Modo de ahorro de energía mientras esperas en la plataforma de lanzamiento. Hay dos opciones:
eMode 1 — ejecuta los sensores a 50Hz y se acelera a velocidad completa en la detección de movimiento. Un buen equilibrio de capacidad de respuesta y ahorro de energía.
eMode 2 — la CPU se despierta a 25Hz y lee por lotes datos de IMU del FIFO del sensor. Los sensores permanecen a 52Hz en modo de baja potencia. Esto reduce a la mitad el ciclo de servicio de la CPU para un consumo de energía en la plataforma más bajo. La barra de batería está deshabilitada y el LED de estado parpadea cada 8 segundos en lugar de estar constantemente activado. Se acelera a velocidad completa en la detección de movimiento.
Requiere firmware 2.3 o posterior.
eNOW
eNOW permite que tu Mercury transmita pings de corto alcance después de que se guarde un vuelo, transmitiendo información como tu altitud de apogeo y nivel de batería. El alcance es aproximadamente 80 a 300 metros dependiendo de condiciones y orientación de aterrizaje. Requiere firmware 2.2 o posterior.
eNOW: Habilitar — activa o desactiva el transmisor eNOW.
eNOW: Intervalo — controla con qué frecuencia se transmiten los pings.
eNOW: Inicio — (próximamente) esta característica transmitirá tu resumen de vuelo más reciente cuando se encienda, permitiendo que otros dispositivos reciban datos de vuelo.
Apagado de WiFi

Esto le indica al altímetro que no permanezca encendido indefinidamente cuando está en modo WiFi / Configuración. Después del tiempo establecido tu dispositivo se apagará. Es fácil encenderlo de nuevo y rápido reconectarse a Altimeter Cloud si necesitas actualizar cualquier configuración de nuevo más tarde.
UART

Esta configuración habilita un UART Serial que transmite datos de sensores e información a 50Hz en los pines de soldadura GP6 y GP7. Cuando está habilitado no podrás usar estos pines para servos u otras salidas.
El UART funciona a 921600 baud, 8 bits con 1 bit de parada para maximizar la duración de la batería. GP6 es el pin TX (conecta a tu RX) y GP7 es el pin RX (conecta a tu TX). Verás una caída de alrededor del 5% en la duración de la batería cuando uses modo UART.
Advertencia: El UART funciona en modo 3.3V. Por favor no transmitas al dispositivo ya que no sirve para nada, y especialmente no envíes una señal de 5V ya que esto podría dañar tu Mercury.
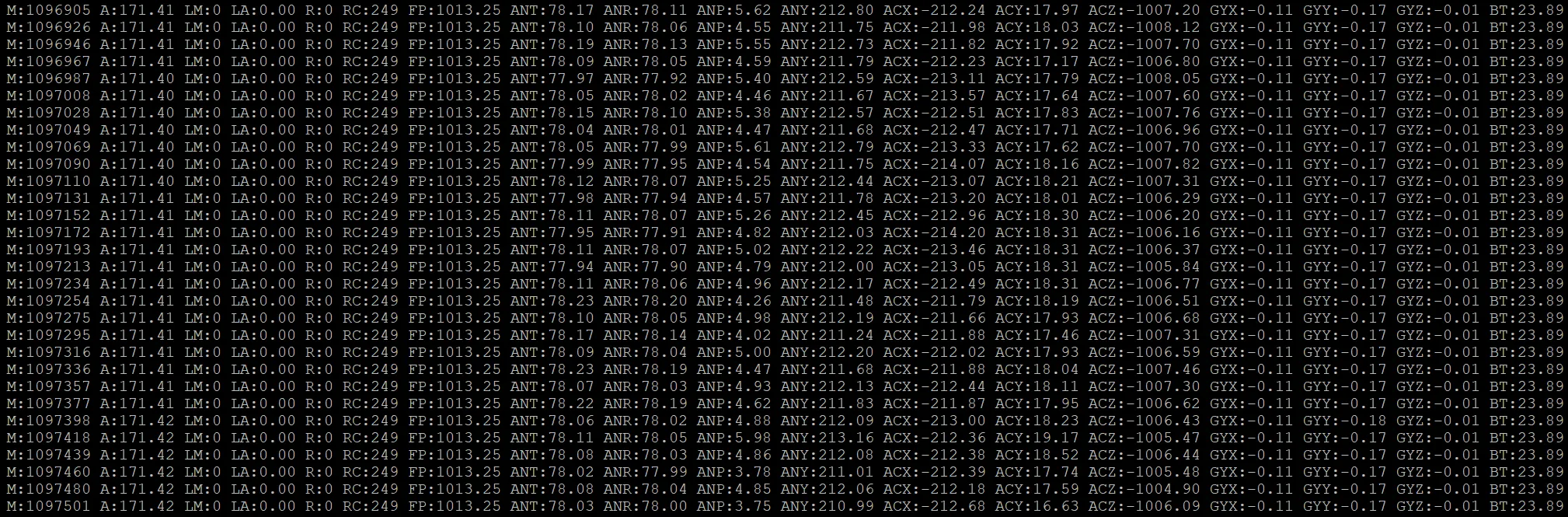
Las variables de salida en transmisión son:
M: Milisegundos desde que se encendió el Mercury.
A: Altitud actual en metros.
LM: Milisegundos cuando el cohete salió de la plataforma (si se detectó lanzamiento).
LA: Altitud de la plataforma al lanzamiento. Resta de la altitud actual para obtener la altura de vuelo en vivo.
R: 1 si el dispositivo está grabando.
RC: Número de muestras en el registro de vuelo (muestra 249 cuando no está grabando — este es el búfer rodante de pre-vuelo).
FP: Presión del pronóstico siendo usada.
ANT: Ángulo de inclinación desde la vertical (grados).
ANR: Ángulo de alabeo (grados).
ANP: Ángulo de cabeceo (grados).
ANY: Ángulo de guiñada (grados).
ACX/ACY/ACZ: Aceleración para cada eje (-32000 a +32000 mG).
GYX/GYY/GYZ: Giroscopio para cada eje (-2000 a +2000 dps).
BT: Temperatura de la placa del sensor de presión.
MT1: Lectura del sensor de temperatura MT1 (si está conectado).
Idioma del dispositivo

Esto establece el idioma nativo para la interfaz del dispositivo, utilizado para el servidor web del dispositivo y la conexión del punto de acceso. Se ofrecen varios idiomas y más pueden ser añadidos en firmware futuro.
Calibración de sensores

Para los datos más precisos recomendamos calibrar tus sensores. Marca la casilla de calibración y guarda — la calibración se ejecutará la próxima vez que el dispositivo entre en modo de vuelo.
Hay una página dedicada que cubre el proceso de calibración: Ver guía de calibración
Soporte de servo (GP6 y GP7)

El Mercury tiene dos pines de soldadura de propósito general (GP6 y GP7) que pueden ser configurados cada uno como una salida estándar ALTO/BAJO o una salida de señal servo. Cuando están configurados como servo puedes establecer los anchos de pulso mín/máx, frecuencia, ángulos ENCENDIDO/APAGADO, y tiempo de retención. Estas salidas se controlan a través del sistema de reglas de acción. Requiere firmware 2.0 o posterior.
Hay una página dedicada que cubre la configuración del servo: Ver guía de configuración de servo
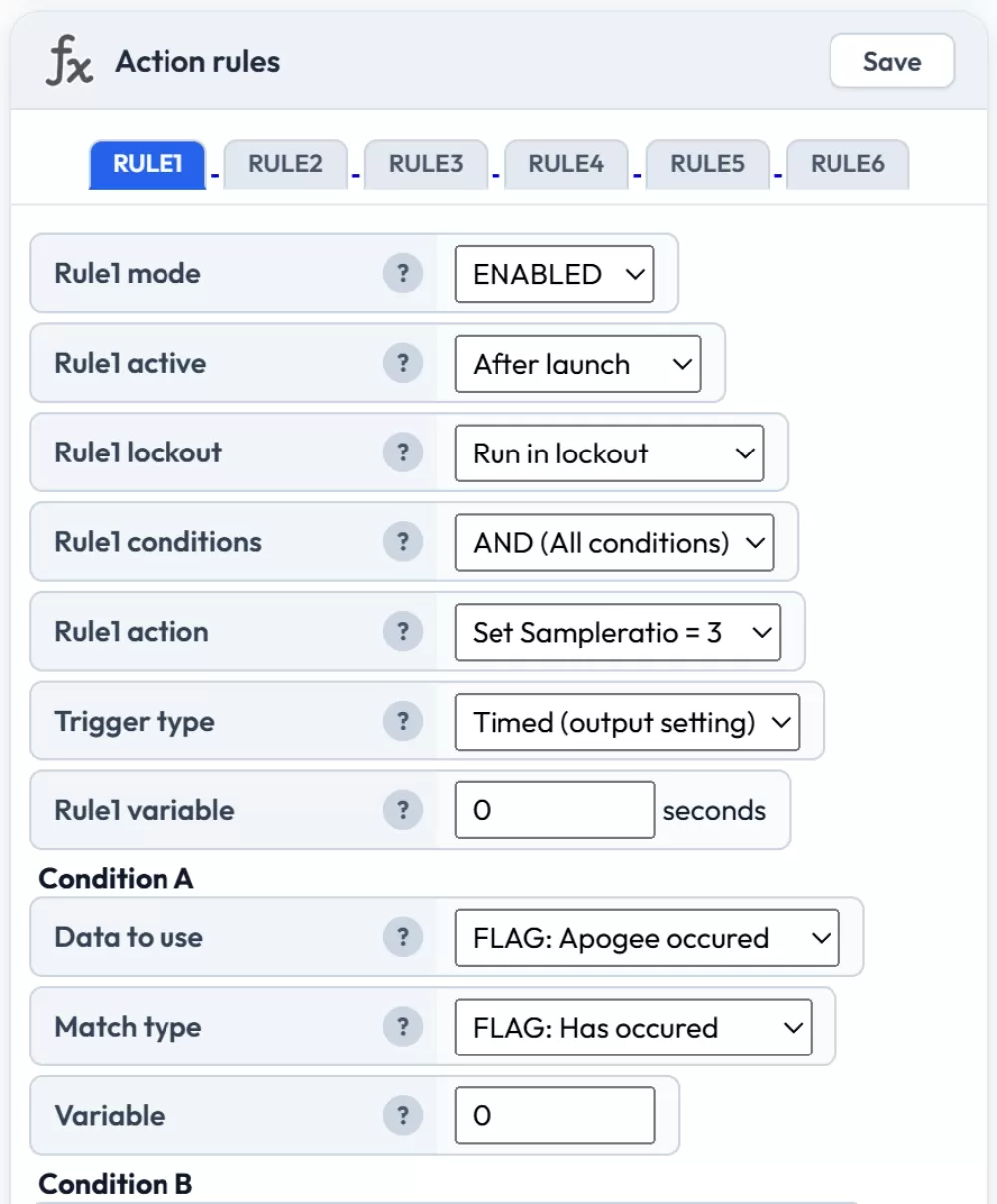
Reglas de acción

El sistema de reglas es la característica más poderosa del Mercury. Puedes crear hasta 6 reglas independientes, cada una con hasta 4 condiciones que deben cumplirse antes de que la acción se active. Las reglas pueden controlar salidas, servos, relaciones de muestreo, y más.
Hay una página dedicada que cubre el sistema de reglas de acción con ejemplos: Ver guía de reglas de acción
Predicción y frenos aerodinámicos

El Mercury puede predecir la altitud del apogeo durante la fase de planeo después del agotamiento del motor. Esta información aparece en tus gráficos de vuelo y también puede usarse para accionar un sistema de freno aerodinámico activo. Requiere firmware 2.1 o posterior.
Hay una página dedicada que cubre predicción y frenos aerodinámicos: Ver guía de predicción y frenos aerodinámicos
Placa de salida de alta corriente ROC2
El ROC2 es una placa de expansión que proporciona dos salidas adicionales de alta corriente. Habilita la placa en configuración, luego configura cada canal de salida con las mismas opciones de disparador disponibles para Salida #1. Las salidas del ROC2 también pueden ser controladas a través del sistema de reglas de acción usando las acciones ROC2 OUT1 y ROC2 OUT2.
Si la placa ROC2 está habilitada en configuración pero no se detecta físicamente al entrar en modo de vuelo, el LED de estado parpadeará en rojo durante 5 segundos como advertencia.
Placa de expansión de servo I2C PCA9685
Puedes conectar una placa de expansión de servo basada en I2C PCA9685 a tu Mercury, proporcionando hasta 6 canales de servo adicionales. Estos servos se controlan a través del sistema de reglas de acción, permitiendo configuraciones de multi-servo complejas para frenos aerodinámicos, control de aletas, despliegue de carga, u otros mecanismos. Requiere firmware 2.0 o posterior.
Las configuraciones incluyen el interruptor de habilitación de la placa, frecuencia del oscilador (predeterminado 25 MHz — ajusta solo si tu placa usa un cristal diferente), y configuración individual del servo para cada uno de los 6 canales incluyendo ancho de pulso mín/máx y frecuencia.
Configuración de WiFi
Puedes configurar hasta 4 redes WiFi. El dispositivo se conectará a la red guardada que tenga la señal más fuerte. Esto es útil para tener tu WiFi del hogar, una conexión de hotspot móvil para el campo, y quizás el WiFi del sitio de lanzamiento de tu club todos guardados.
Las configuraciones de WiFi no entran en efecto hasta la próxima vez que WiFi comience. Puedes activar esto desconectando e insertando nuevamente el cable USB-C o apagando y encendiendo el dispositivo.
Advertencia: Si ingresas credenciales de WiFi incorrectas, tu dispositivo puede perder su conexión a Altimeter Cloud. Necesitarás conectarte a través de su punto de acceso WiFi para corregir la configuración.
Potencia de transmisión de WiFi
La potencia de transmisión de la radio WiFi. Valores más altos proporcionan mejor alcance pero usan más batería.