Das Mercury ermöglicht es dir, sechs benutzerdefinierte Regeln zu konfigurieren, von denen jede bis zu 4 Bedingungen haben kann. Diese können Ausgänge, Servos, Luftbremsen steuern und bei Bedarf Konfigurationsvariablen ändern.
Es gibt auch eine einfache Ausgangskontroll-Einstellung. Du kannst beide Systeme verwenden oder auch nur eines, da sie unabhängig voneinander funktionieren.
Das Regelkonfigurationsfeld
Beim Auslösen von Ausgängen oder Servos müssen diese zunächst über die Servo-Einstellungen oder die Output #1-Einstellungen auf der Einstellungsseite konfiguriert werden. Die Regeln können diese Ausgänge dann entsprechend ihrer Konfiguration auslösen. Es ist zu beachten, dass die Einschaltdauer des Hauptausgangs in den Output #1-Einstellungen festgelegt ist, auch wenn du den einfachen Ausgansauslöser nicht verwendest (du kannst ihn deaktiviert lassen, aber nur die ON-Zeit-Option setzen).
Beim Konfigurieren einer Regel musst du den Modus von DISABLED zu ENABLED ändern und alle Einstellungen wie erforderlich konfigurieren. Du kannst bis zu 4 Bedingungen für jede Regel einrichten und entscheiden, ob alle Bedingungen erfüllt sein müssen oder ob eine einzelne Bedingung ausreicht, um die Regel auszulösen.
Regeleinstellungen
Modus
Aktiviert oder deaktiviert die Regel. Um eine Regel zu verwenden, ändere dies auf aktiviert.
Aktiv
Steuert, wann die Regel ausgeführt werden kann. Wähle, ob die Regel immer aktiv ist (auch während des Wartens auf der Startrampe vor dem Start) oder nur nach dem erkannten Start aktiv ist. Für die meisten Bereitstellungsregeln möchtest du „nur nach dem Start".
Sperrung
Wenn das Höhenmesser einen schnellen Druckanstieg erkennt (z. B. durch eine Auswurfladung oder Überschallübergang), wechselt es in den Sperrmodus. Während der Sperrung wird die Höhe als unzuverlässig erachtet und das Höhenmesser verschiebt Entscheidungen, die es möglicherweise falsch trifft. Dies kann in den Flugeinstellungen konfiguriert werden.
Verwende diese Einstellung, um zu entscheiden, ob deine Regel während einer Sperrung ausgeführt werden soll (nützlich für Funktionen, die nicht vom Druck beeinflusst werden, wie z. B. zeitbasierte Auslöser) oder ob sie nur außerhalb von Sperren ausgeführt werden soll.
Bedingungen (AND / OR / Grouped)
Steuert, wie mehrere Bedingungen bewertet werden:
AND (Alle Bedingungen) — Die Regel wird nur ausgelöst, wenn alle Bedingungen (A, B, C, D) gleichzeitig während desselben Zyklus erfüllt sind.
OR (Eine beliebige Bedingung) — Die Regel wird ausgelöst, wenn eine beliebige Bedingung erfüllt ist.
(A+B) OR (C+D) — Die Bedingungen A und B müssen beide wahr sein, ODER die Bedingungen C und D müssen beide wahr sein. Dies gibt dir zwei unabhängige Bedingungspaare in einer einzigen Regel. Du könntest z. B. einen Ausgang auslösen, wenn (der Apogäum aufgetreten ist UND die Höhe unter 100 m liegt) ODER (die Zeit nach dem Start 60 Sekunden überschreitet UND die Geschwindigkeit unter 5 m/s liegt) — wodurch sowohl ein normales Dual-Deploy als auch ein Failsafe-Timeout in einer Regel abgedeckt werden. Erfordert Firmware 2.3 oder später.
Aktion
Dies teilt der Regel mit, was zu tun ist, wenn ihre Bedingungen erfüllt sind. Die verfügbaren Aktionen sind:
- OUTPUT #1 — feuert den integrierten Hochstrom-Ausgang
- GP6 — aktiviert den GP6-Lötpad-Ausgang oder Servo
- GP7 — aktiviert den GP7-Lötpad-Ausgang oder Servo
- BLOCK (perm) — blockiert dauerhaft alle anderen Regeln für den Rest des Fluges
- BLOCK (v secs) — blockiert alle anderen Regeln für die im Variablenfeld angegebene Anzahl von Sekunden
- End recording — beendet die Flugaufzeichnung sofort
- Set Sample ratio = 1, 2, 3, 5, 10 — ändert die Logging-Rate während des Fluges, um die Aufzeichnungszeit zu verlängern
- I2C Servo #1 bis #6 — löst einen der 6 Kanäle auf der Erweiterungsservo-Platine PCA9685 aus
- Airbrake OFF — deaktiviert das Luftbremsen-System
- Airbrake ON — aktiviert das Luftbremsen-System
- ROC2 OUT1 — feuert Kanal 1 auf der ROC2-Hochstrom-Ausgangs-Erweiterungsplatine
- ROC2 OUT2 — feuert Kanal 2 auf der ROC2-Hochstrom-Ausgangs-Erweiterungsplatine
Auslösetyp
Steuert, wie sich die Aktion verhält, wenn sie ausgelöst wird. Dies ist eine neuere Ergänzung, die dir viel mehr Flexibilität bietet:
- Timed (output setting) — feuert für die Dauer, die in der Ausgabe- oder Servo-Einstellungsbox konfiguriert ist. Dies ist das klassische Verhalten.
- Timed (V1 seconds) — feuert für die Anzahl der Sekunden, die im Variablenfeld der Regel unten angegeben ist. Dies ermöglicht jeder Regel eine eigene unabhängige Einschaltzeit, ohne die Ausgangseinstellungen zu ändern.
- Latch ON — schaltet den Ausgang ein und hält ihn eingeschaltet, bis eine separate Regel mit Latch OFF feuert. Nützlich für Dinge, die eine unvorhersehbare Dauer lang aktiv sein müssen.
- Latch OFF — schaltet den Ausgang sofort aus. Verwende dies in Kombination mit einer Latch ON-Regel, um Ein-/Aus-Paare zu erstellen, die von verschiedenen Bedingungen gesteuert werden.
Variable
Wenn deine Regel eine Variable erfordert, gib sie hier ein. Für „BLOCK (v secs)" ist dies die Anzahl der Sekunden zum Blockieren. Für „Timed (V1 seconds)" ist dies die Einschaltdauer in Sekunden. Ausgänge und Servos, die eine eigene konfigurierte Einschaltzeit verwenden, benötigen dieses Feld nicht.
Bedingungen
Jede Regel hat bis zu 4 Bedingungen. Du musst mindestens 1 Bedingung angeben, damit eine Regel funktioniert. Jede Bedingung hat 3 Optionen zum Einstellen.
Zu verwendende Daten
Dies gibt an, gegen welche Flugdaten die Bedingung geprüft wird. Die verfügbaren Optionen sind:
Sensor- und Flugdaten:
- Altitude above pad (m) — aktuelle Höhe relativ zur Startrampe
- Acc magnitude (G) — Gesamtbeschleunigungsgröße über alle Achsen
- Acc X / Y / Z (G) — Beschleunigung auf einzelnen Achsen
- Highest Gyro axis (dps) — die höchste Rotationsgeschwindigkeit über alle Gyroskopachsen
- Gyro X / Y / Z (dps) — Rotationsgeschwindigkeit auf einzelnen Achsen
- Tilt angle (degrees) — Winkel zur Vertikalen
- Roll / Pitch / Yaw angle (degrees) — einzelne Ausrichtungswinkel
- Velocity (m/s) — aktuelle Aufstiegs- oder Abstiegsgeschwindigkeit
- Battery (%) — aktueller Batterieladezustand
- Board temperature (°C) — Temperatur vom Drucksensor
- MT1 temperature (°C) — Temperatur vom externen MT1-Sensor (falls angeschlossen)
Zeitbasiert:
- Time after launch (s) — Sekunden seit Startdetektion
- Time after apogee (s) — Sekunden seit Apogäum
- Time after landing (s) — Sekunden seit Landungserkennung
- Time after burnout (s) — Sekunden seit Motorabbrand
Vorhersage und Luftbremsen:
- Predicted apogee (m) — die aktuelle geschätzte Apogäum-Höhe während der Kühlphase
- Air brake on percent (%) — wie weit die Luftbremsen derzeit ausgefahren sind (0–100%)
Mehrstufig (Firmware 2.3+):
- Time after burnout 2 / 3 / 4 (s) — Sekunden seit dem Abbrand der 2., 3. oder 4. Stufe
- Time after ignition 2 / 3 / 4 (s) — Sekunden seit der Zündung der 2., 3. oder 4. Stufe
- Stage count — die Anzahl der bisher erkannten Stufen
Ereignisflags:
- FLAG: Launch occurred
- FLAG: Apogee occurred
- FLAG: Burnout occurred
- FLAG: Landing occurred
- FLAG: Burnout 2 / 3 / 4 occurred (mehrstufig)
- FLAG: Ignition 2 / 3 / 4 occurred (mehrstufig)
Übereinstimmungstyp
Dies teilt der Regel mit, wie sie die gewählten Daten gegen deinen Variablenwert vergleichen soll:
- (>) Greater than
- (>=) Greater or equal
- (=) Equal
- (!=) Not equal
- (<) Less than
- (<=) Less or equal
- FLAG: Has occurred — verwende mit FLAG-Datenoptionen
- FLAG: Has not occurred — verwende mit FLAG-Datenoptionen
Bedingungsvariable
Der Schwellenwert zum Vergleichen. Wenn du z. B. entsprechend auslösen möchtest, wenn die Höhe unter 80 Metern fällt, gib hier 80 ein. Nicht erforderlich für FLAG-Bedingungen.
Beispiel: Den Ausgang nach Apogäum und unter 100 Metern auslösen
Dieses Beispiel könnte für ein Dual-Deploy verwendet werden, bei dem dein Motor den ersten kleinen Fallschirm ausgeworfen hat und du den Ausgang verwendest, um einen sekundären Fallschirm auszulösen, wenn die Rakete unter 100 Meter fällt.
Stelle die erste Bedingung auf „FLAG: Apogee occurred" mit dem Übereinstimmungstyp „FLAG: Has occurred". Stelle die zweite Bedingung auf „Altitude above pad (m)" kleiner als 100.
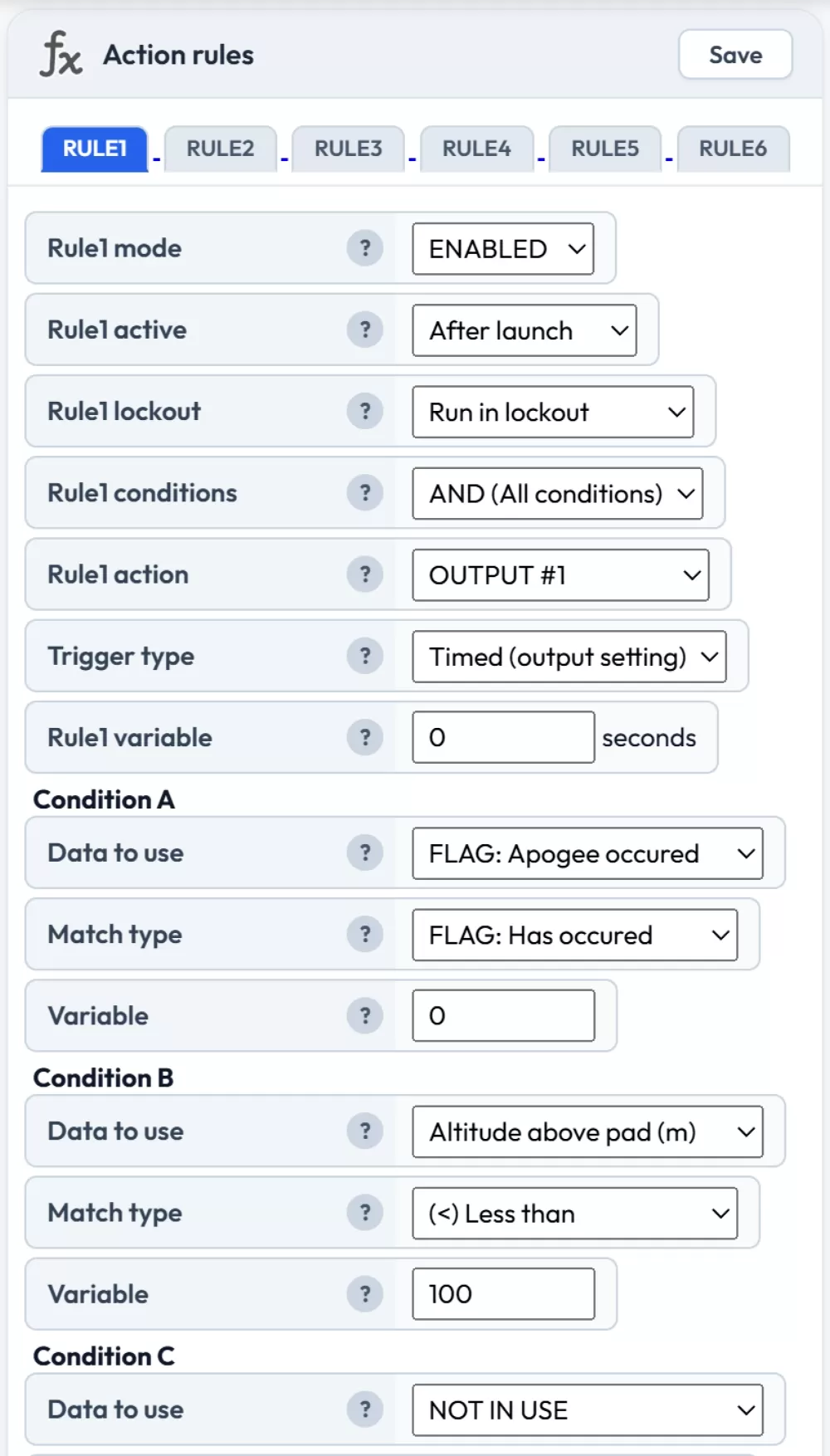
Dual-Deploy bei 100 Metern nach Apogäum
Beispiel: Air-Start der zweiten Stufe mit Neigungsschutz
Dieses Beispiel verwendet zwei Regeln, um den Motor der zweiten Stufe über die OUTPUT 1 Sekunde nach dem Abbrand zu zünden, solange die Rakete innerhalb von 35 Grad zur Vertikalen liegt. Die zweite Regel löst ein Failsafe-Bergungssystem über den GP6-Lötpad aus, unabhängig davon, ob die zweite Stufe gezündet wurde.
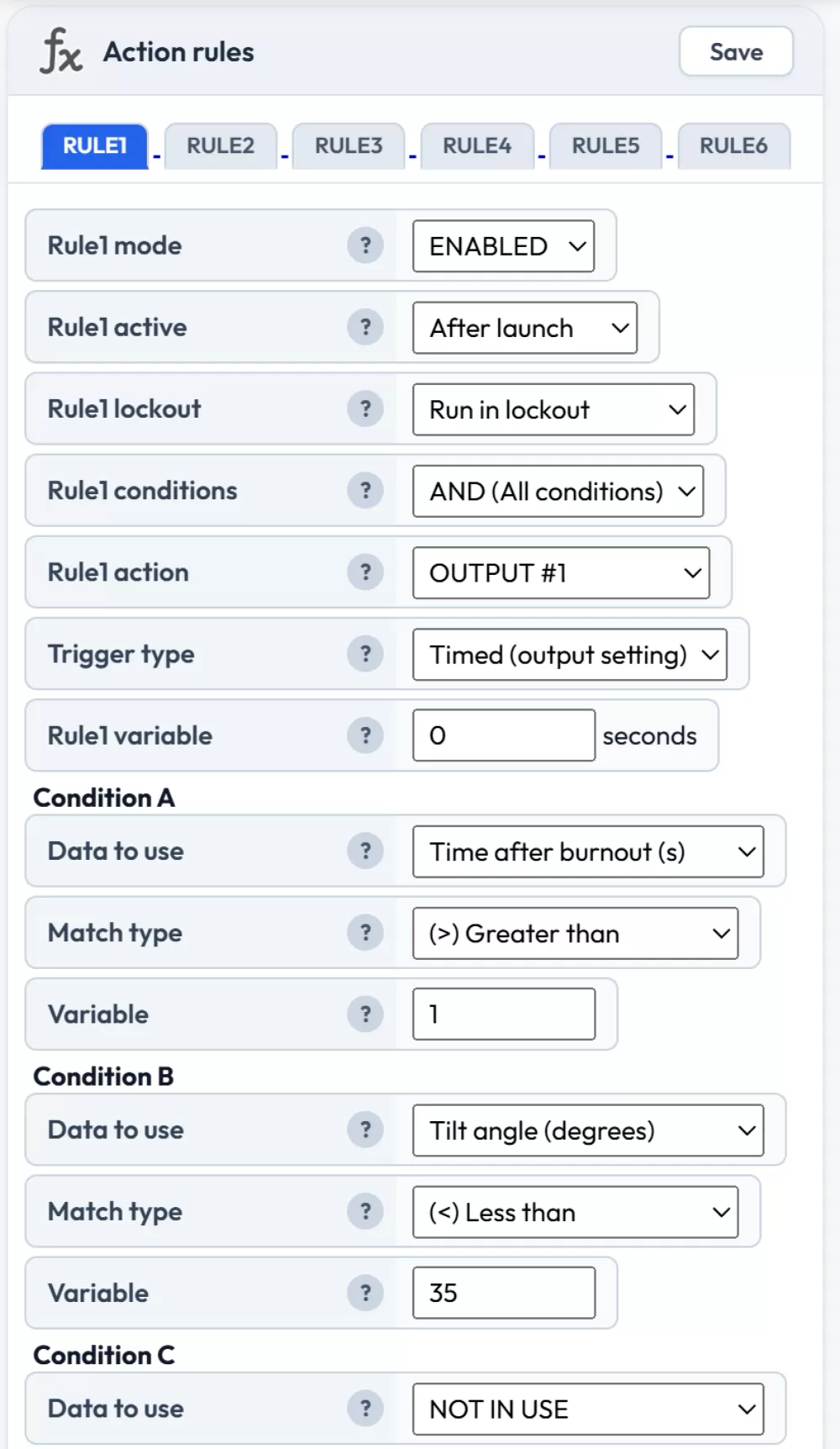
Regel 1: geschützter Air-Start — feuert Ausgang 1 Sekunde nach Abbrand, wenn die Neigung unter 35° liegt
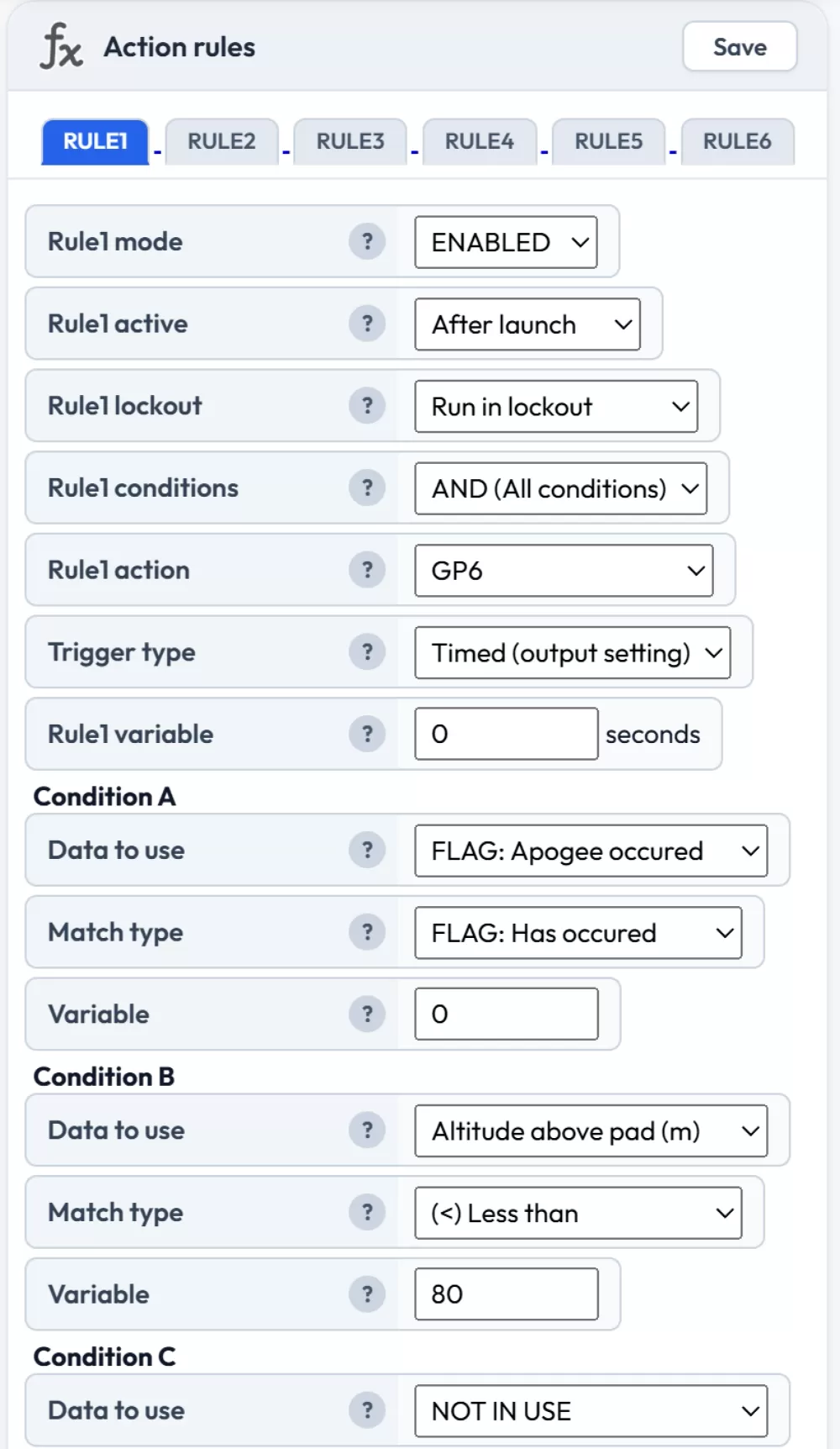
Regel 2: Failsafe-Bergung bei 80 Metern über GP6
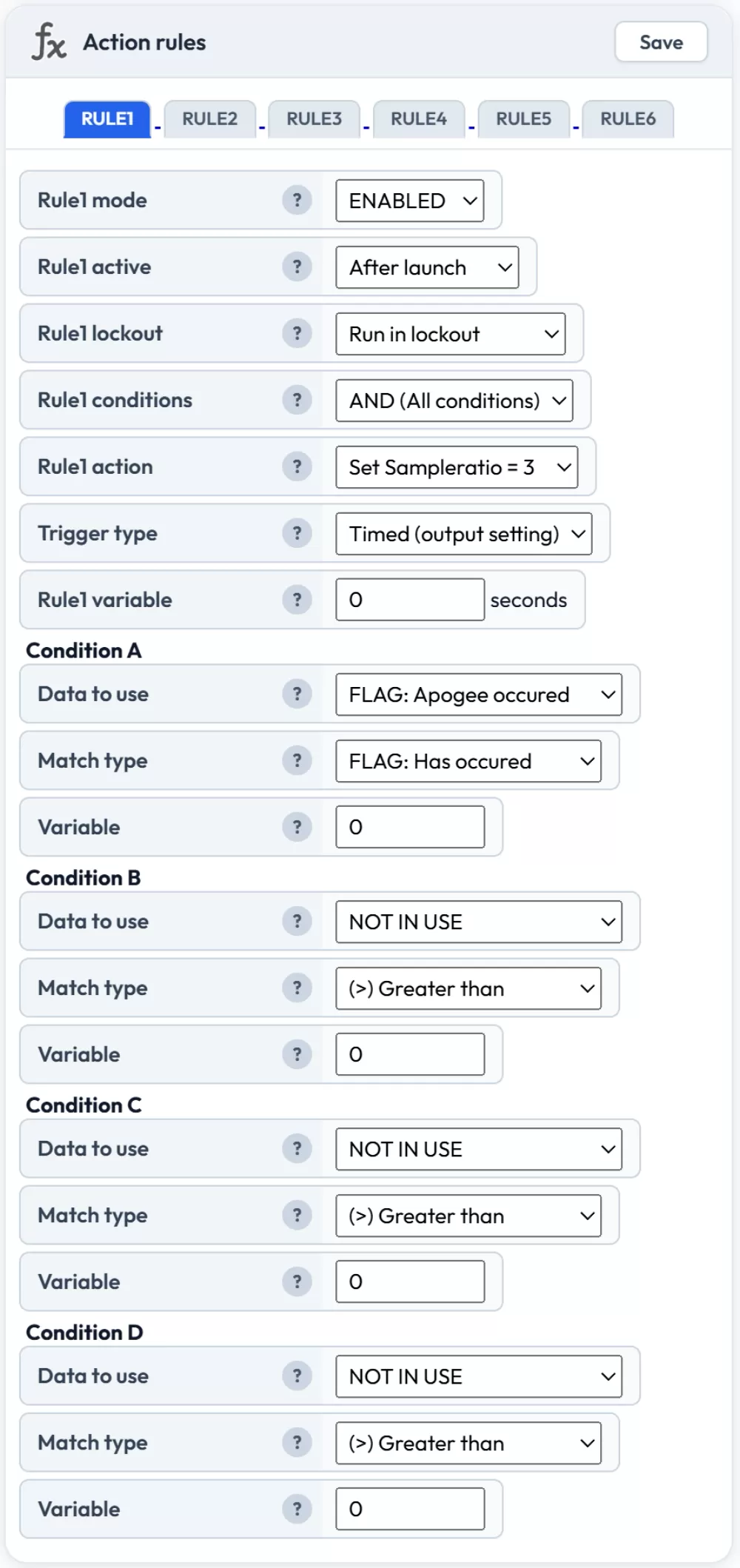
Beispiel: Sample-Ratio 20 Sekunden nach Apogäum erhöhen
Dieses Beispiel senkt die Logging-Rate nach der aktiven Flugphase, um die Gesamtaufzeichnungszeit zu verlängern. Das Sample-Ratio wird auf 2 (Logging jede zweite Probe) eingestellt, wenn 20 Sekunden seit dem Apogäum vergangen sind.
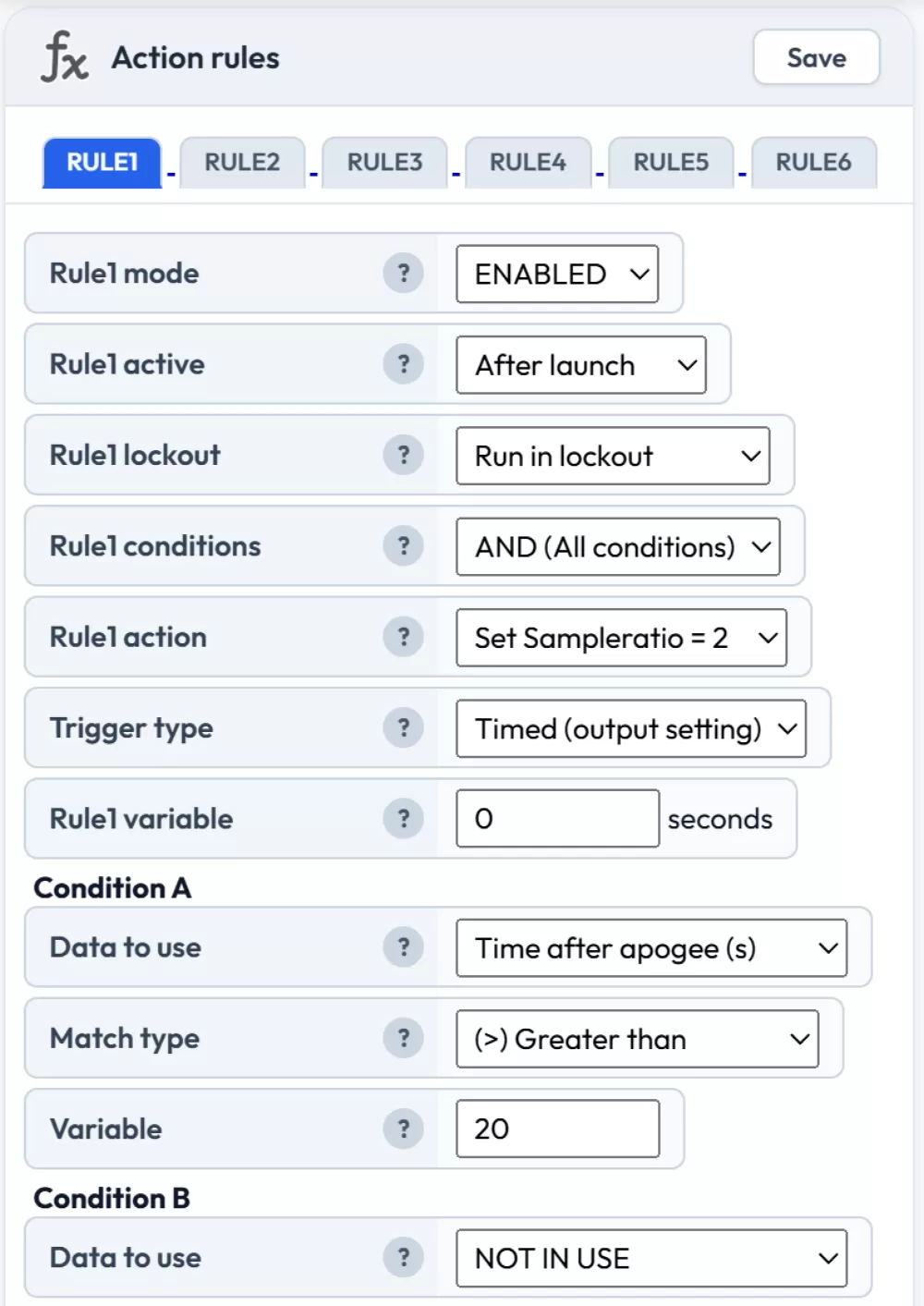
Ein Sample-Ratio von 2 bedeutet, dass wir jede zweite Probe im Flugprotokoll protokollieren
Beispiel: Regeln bis 10 Sekunden nach dem Start blockieren
Dieses Beispiel verhindert, dass alle anderen Regeln ausgeführt werden, bis 10 Sekunden nach dem erkannten Start verstrichen sind. Nützlich als Sicherheitsmaßnahme, um vorzeitige Bereitstellungsauslöser während der Booster-Phase zu vermeiden.
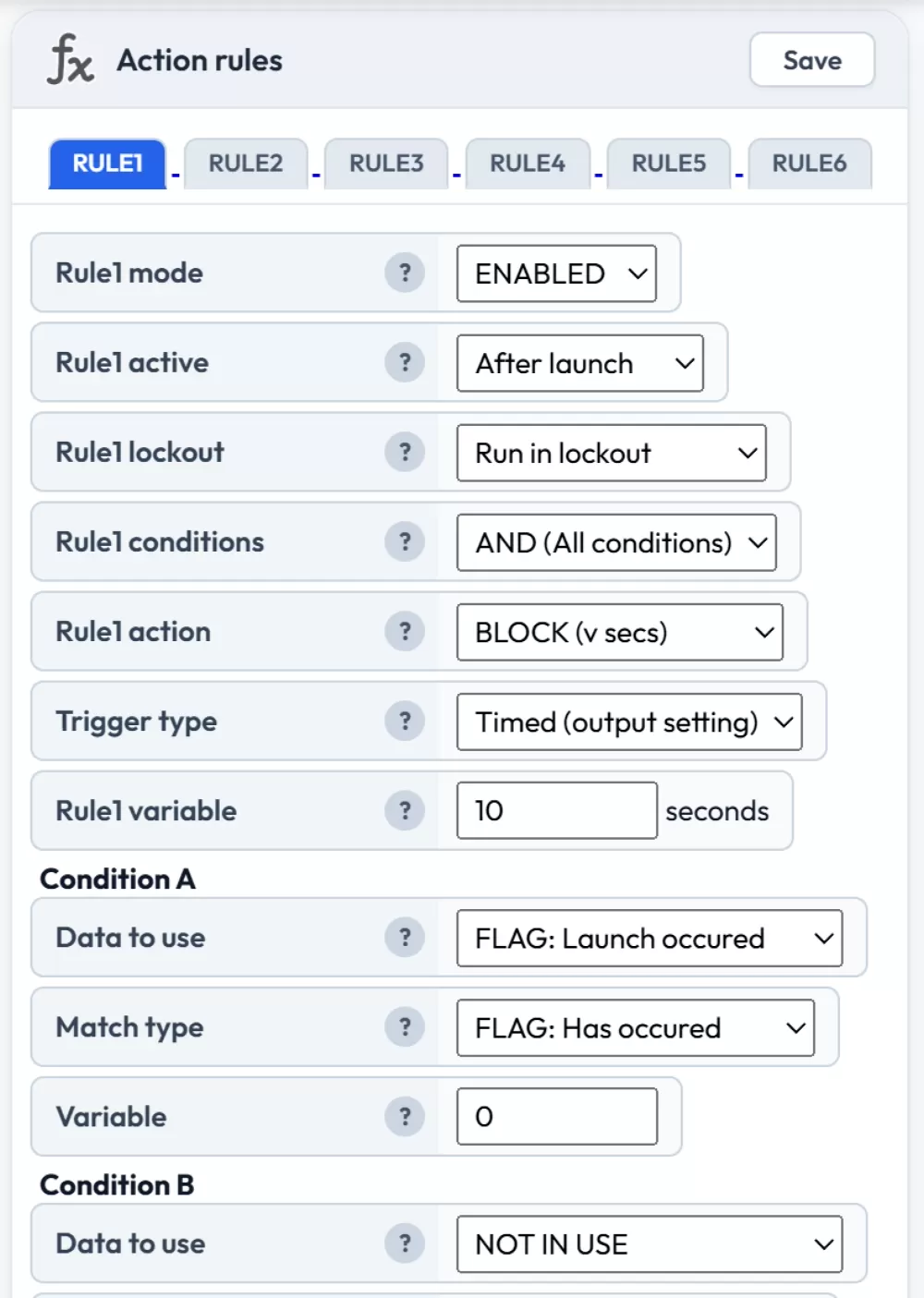
Verwendet BLOCK (v secs) mit der Regelvariablen auf 10 gesetzt
Beispiel: Einen I2C-Servo zum Bereitstellen eines Bergungssystems verwenden
Dieses Beispiel löst einen Servo aus, um ein Bergungssystem bereitzustellen. Es wartet, bis mindestens 4 Sekunden nach der erkannten Startdetektion vergangen sind und bis die Geschwindigkeit unter 20 Meter pro Sekunde gefallen ist.
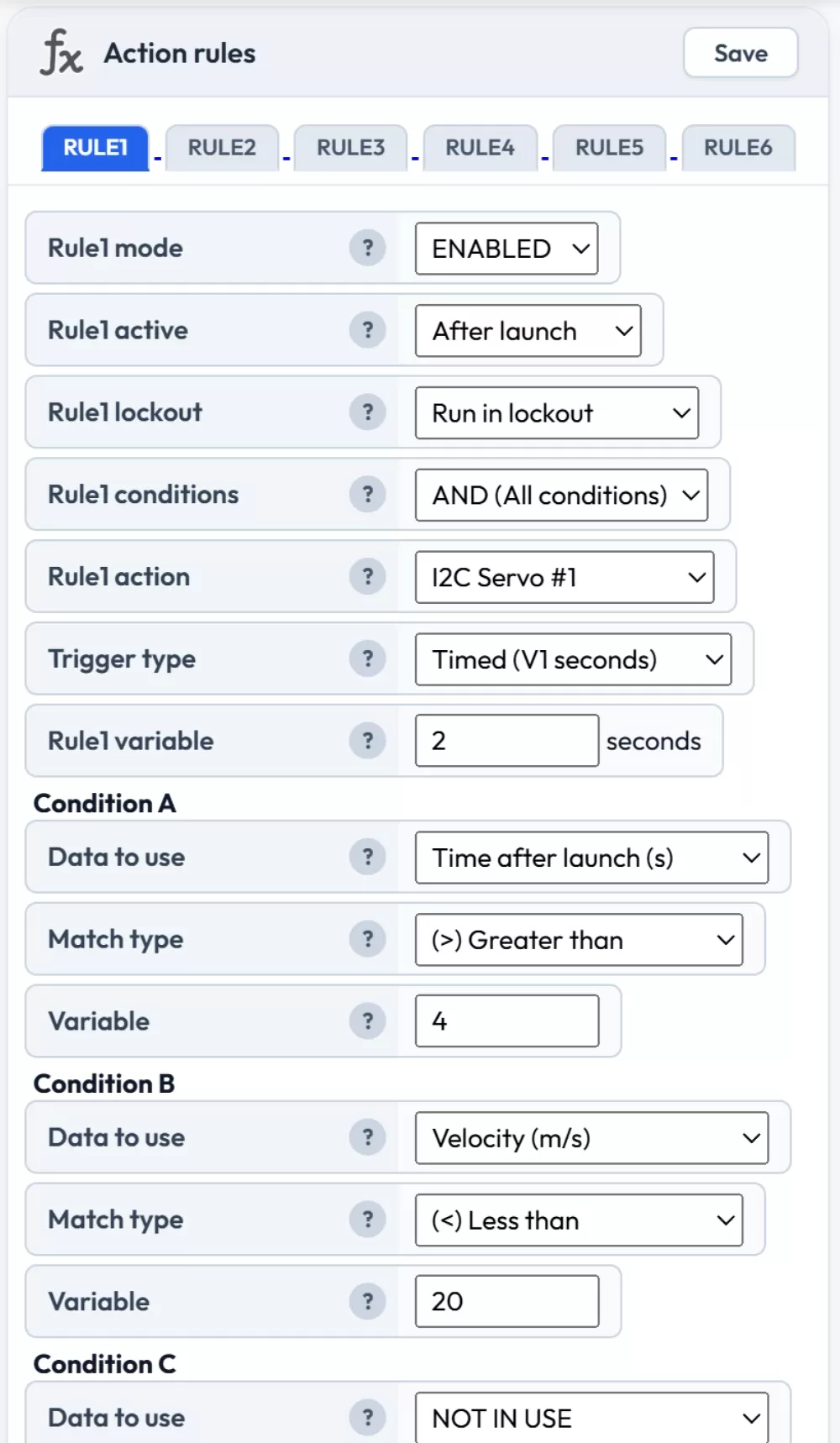
Konfiguriere die Servos in den I2C-Servo-Erweiterungseinstellungen
Beispiel: Latch ON / Latch OFF für kontinuierliche Ausgabe
Der Latch-Auslösetyp ist nützlich, wenn ein Ausgang eine unvorhersehbare Dauer lang eingeschaltet bleiben muss. Du möchtest z. B. einen Summer nach der Landung aktivieren und ihn eingeschaltet lassen, bis die Batterie unter einen Schwellenwert fällt.
Regel 1: Stelle die Aktion auf OUTPUT #1, Auslösetyp auf „Latch ON", mit einer Bedingung von „FLAG: Landing occurred" — „FLAG: Has occurred".
Regel 2: Stelle die Aktion auf OUTPUT #1, Auslösetyp auf „Latch OFF", mit einer Bedingung von „Battery (%)" kleiner als 10.
Der Ausgang wird eingeschaltet, wenn die Landung erkannt wird, und bleibt eingeschaltet, bis die Batterie unter 10% fällt.
Beispiel: Mehrstufiger Air-Start mit Stufenerkennung
Für mehrstufige Raketen kannst du die stufenspezifischen Bedingungen verwenden, um jede Stufe unabhängig zu steuern. Um z. B. einen Motor der zweiten Stufe 0,5 Sekunden nach dem Abbrand der ersten Stufe mit Neigungsschutz zu zünden:
Bedingung A: „FLAG: Burnout occurred" — „FLAG: Has occurred"
Bedingung B: „Time after burnout (s)" größer als 0,5
Bedingung C: „Tilt angle (degrees)" kleiner als 30
Du kannst dann „Time after ignition 2" und „FLAG: Burnout 2 occurred" in nachfolgenden Regeln verwenden, um die Bereitstellungseinsätze relativ zum Flugprofil der zweiten Stufe zu verwalten.
Beispiel: Dual-Deploy mit Failsafe mit (A+B) OR (C+D)
Der gruppierte Bedingungsmodus ermöglicht es dir, einen primären Auslöser und ein Failsafe-Backup in einer einzigen Regel zu kombinieren. Um z. B. einen Hauptfallschirm entweder in der normalen Höhe oder nach einem Timeout bereitzustellen:
Stelle den Bedingungsmodus auf (A+B) OR (C+D), dann:
Bedingung A: „FLAG: Apogee occurred" — „FLAG: Has occurred"
Bedingung B: „Altitude above pad (m)" kleiner als 150
Bedingung C: „Time after launch (s)" größer als 60
Bedingung D: „Velocity (m/s)" kleiner als 5
Dies feuert den Ausgang, wenn (das Apogäum aufgetreten ist UND die Höhe unter 150 m liegt) ODER (mehr als 60 Sekunden seit dem Start vergangen sind UND die Rakete sich kaum bewegt). Das zweite Paar dient als Failsafe für den Fall, dass die Apogäum-Detektion fehlschlägt. Erfordert Firmware 2.3 oder später.