De Mercury stelt u in staat om zes aangepaste regels in te stellen, elk met maximaal 4 voorwaarden. Deze kunnen outputs, servo's, airbrakes bedienen en configuratievariabelen naar behoefte wijzigen.
Er is ook een eenvoudige optie voor output-besturing beschikbaar. U kunt beide systemen gebruiken, aangezien zij onafhankelijk van elkaar werken.
Het regelconfiguratievak
Bij het activeren van outputs of servo's moeten deze eerst worden ingesteld via de servo-instellingen of de Output #1-instellingen op de instellingenpagina. De regels kunnen deze outputs vervolgens activeren zoals zij zijn ingesteld. Het is belangrijk op te merken dat de aan-tijd van de hoofdoutput is ingesteld in de Output #1-instellingen, zelfs als u niet de eenvoudige output-trigger gebruikt (u kunt deze uitgeschakeld laten, maar stelt eenvoudig de optie AAN-tijd in).
Bij het configureren van een regel moet u de modus wijzigen van UITGESCHAKELD naar INGESCHAKELD en alle instellingen naar wens configureren. U kunt maximaal 4 voorwaarden voor elke regel instellen en bepalen of alle voorwaarden moeten worden gehaald, of of één enkele voorwaarde voldoende is om de regel te activeren.
Regelinstellingen
Modus
Schakelt de regel in of uit. Wijzig dit in ingeschakeld om een regel te gebruiken.
Actief
Bepaalt wanneer de regel kan worden uitgevoerd. Kies of de regel altijd actief is (zelfs terwijl u op het lunchplatform wacht vóór de lancering) of alleen actief nadat de lancering is gedetecteerd. Voor de meeste inzamelingregels wilt u "alleen na lancering".
Sluiting
Als de altimeter een snelle druktoename detecteert (bijvoorbeeld van een ejectielading of een supersonische overgang), schakelt deze over naar de sluitingsmodus. Tijdens sluiting wordt de hoogte als onbetrouwbaar beschouwd en stelt de altimeter besluiten uit die het fout zou kunnen doen. Dit kan worden ingesteld in de vluchtinstellingen.
Gebruik deze instelling om te bepalen of uw regel moet worden uitgevoerd tijdens sluiting (handig voor functies die niet door druk worden beïnvloed, zoals op tijd gebaseerde triggers) of of deze alleen buiten sluitingen moet worden uitgevoerd.
Voorwaarden (EN / OF / Gegroepeerd)
Bepaalt hoe meerdere voorwaarden worden geëvalueerd:
EN (Alle voorwaarden) — de regel wordt alleen geactiveerd als elke voorwaarde (A, B, C, D) gelijktijdig in dezelfde cyclus wordt gehaald.
OF (Elke voorwaarde) — de regel wordt geactiveerd als een enkele voorwaarde wordt gehaald.
(A+B) OF (C+D) — voorwaarden A en B moeten beide waar zijn, OF voorwaarden C en D moeten beide waar zijn. Dit geeft u twee onafhankelijke voorwaardenparen in één regel. Bijvoorbeeld, u zou een output kunnen activeren als (apogeum heeft plaatsgevonden EN hoogte onder 100 m) OF (tijd na lancering overschrijdt 60 seconden EN snelheid is onder 5 m/s) — waarbij zowel een normale dubbele inzameling als een failsafe-timeout in één regel zijn opgenomen. Vereist firmware 2.3 of hoger.
Actie
Dit vertelt de regel wat te doen wanneer aan de voorwaarden is voldaan. De beschikbare acties zijn:
- OUTPUT #1 — activeert de ingebouwde hoogstroomoutput
- GP6 — activeert de GP6-soldeerpadoutput of servo
- GP7 — activeert de GP7-soldeerpadoutput of servo
- BLOK (perm) — blokkeert permanent alle andere regels van de rest van de vlucht
- BLOK (v seconden) — blokkeert alle andere regels voor het aantal seconden dat is opgegeven in het variabelveld
- Opname beëindigen — stopt de vluchopname onmiddellijk
- Bemonsteringsverhoudingsset = 1, 2, 3, 5, 10 — wijzigt het logboekregistratiepercentage tijdens de vlucht om de opnametijd te verlengen
- I2C Servo #1 tot #6 — activeert een van de 6 kanalen op de PCA9685-expansieservokaart
- Airbrake UIT — schakelt het airbrakesysteem uit
- Airbrake AAN — schakelt het airbrakesysteem in
- ROC2 OUT1 — activeert kanaal 1 op de ROC2-expansiekaart met hoge stroomoutput
- ROC2 OUT2 — activeert kanaal 2 op de ROC2-expansiekaart met hoge stroomoutput
Activeringstype
Bepaalt hoe de actie zich gedraagt wanneer deze wordt geactiveerd. Dit is een nieuwere toevoeging die u veel meer flexibiliteit geeft:
- Getimed (output-instelling) — activeert voor de duur die is ingesteld in de output- of servo-instellingenvak. Dit is het klassieke gedrag.
- Getimed (V1 seconden) — activeert voor het aantal seconden dat is opgegeven in het variabelveld van de regel hieronder. Dit stelt elke regel in staat om een eigen onafhankelijke aan-tijd te hebben zonder de output-instellingen te wijzigen.
- Vergrendel AAN — schakelt de output in en houdt deze ingeschakeld totdat een aparte regel met Vergrendel UIT wordt geactiveerd. Handig voor dingen die voor een onvoorspelbare duur actief moeten blijven.
- Vergrendel UIT — schakelt de output onmiddellijk uit. Gebruik dit in combinatie met een Vergrendel AAN-regel om AAN/UIT-paren te maken die door verschillende voorwaarden worden beheerd.
Variabele
Als uw regel een variabele vereist, voert u deze hier in. Voor "BLOK (v seconden)" is dit het aantal seconden voor blokkering. Voor "Getimed (V1 seconden)" is dit de aan-tijd in seconden. Outputs en servo's die hun eigen geconfigureerde aan-tijd gebruiken, hebben dit veld niet nodig.
Voorwaarden
Elke regel heeft maximaal 4 voorwaarden. U moet minstens 1 voorwaarde voor een regel opgeven om deze te laten werken. Elke voorwaarde heeft 3 opties om in te stellen.
Gegevens die moeten worden gebruikt
Dit specificeert welke vluchgegevens de voorwaarde controleert. De beschikbare opties zijn:
Sensor- en vluchgegevens:
- Hoogte boven lunchplatform (m) — huidige hoogte ten opzichte van het lunchplatform
- Acc-magnitude (G) — totale versnellingsmagnitude over alle assen
- Acc X / Y / Z (G) — versnelling op individuele assen
- Hoogste gyro-as (dps) — de hoogste rotatiesnelheid over alle gyroscoopassen
- Gyro X / Y / Z (dps) — rotatiesnelheid op individuele assen
- Kanthoek (graden) — hoek van verticaal
- Rol- / dunk- / yaw-hoek (graden) — individuele oriëntatiepunten
- Snelheid (m/s) — huidige klim- of daalsnelheid
- Accu (%) — huiding batterijlaadniveau
- Bordtemperatuur (°C) — temperatuur van de druicsensor
- MT1-temperatuur (°C) — temperatuur van de externe MT1-sensor (indien aangesloten)
Op tijd gebaseerd:
- Tijd na lancering (s) — seconden sinds lancering werd gedetecteerd
- Tijd na apogeum (s) — seconden sinds apogeum
- Tijd na landing (s) — seconden sinds landing werd gedetecteerd
- Tijd na uitbrand (s) — seconden sinds motoruitbrand
Voorspelling en airbrakes:
- Voorspelde apogeum (m) — de huiding geschatte apogeum-hoogte tijdens de kusttase
- Airbrake aan procent (%) — hoe ver de airbrakes momenteel zijn uitgezet (0–100%)
Meervoudig-fase (firmware 2.3+):
- Tijd na uitbrand 2 / 3 / 4 (s) — seconden sinds 2e, 3e of 4e fase-uitbrand
- Tijd na ontsteking 2 / 3 / 4 (s) — seconden sinds 2e, 3e of 4e fase-ontsteking
- Fasennummer — het aantal fasen tot nu toe gedetecteerd
Eventmarkeringen:
- MARKERING: Lancering vond plaats
- MARKERING: Apogeum vond plaats
- MARKERING: Uitbrand vond plaats
- MARKERING: Landing vond plaats
- MARKERING: Uitbrand 2 / 3 / 4 vond plaats (meervoudig-fase)
- MARKERING: Ontsteking 2 / 3 / 4 vond plaats (meervoudig-fase)
Overeenkomsttype
Dit vertelt de regel hoe de gekozen gegevens tegen uw variabelewaarde moeten worden vergeleken:
- (>) Groter dan
- (>=) Groter of gelijk
- (=) Gelijk
- (!=) Niet gelijk
- (<) Kleiner dan
- (<=) Kleiner of gelijk
- MARKERING: Heeft plaatsgevonden — gebruik met MARKERING-gegevensopties
- MARKERING: Heeft niet plaatsgevonden — gebruik met MARKERING-gegevensopties
Voorwaardenvariabele
De drempelwaarde om tegen te vergelijken. Bijvoorbeeld, als u aanpast wanneer hoogte onder 80 meter daalt, voert u hier 80 in. Niet nodig voor MARKERING-voorwaarden.
Voorbeeld: De output activeren na apogeum en onder 100 meter
Dit voorbeeld zou kunnen worden gebruikt voor een dubbele inzameling waarbij uw motor het eerste kleine parachute heeft uitgeworpen en u de output wilt gebruiken om een secundair parachute te activeren wanneer de raket onder 100 meter valt.
Stel de eerste voorwaarde in op "MARKERING: Apogeum vond plaats" met overeenkomsttype "MARKERING: Heeft plaatsgevonden". Stel de tweede voorwaarde in op "Hoogte boven lunchplatform (m)" kleiner dan 100.
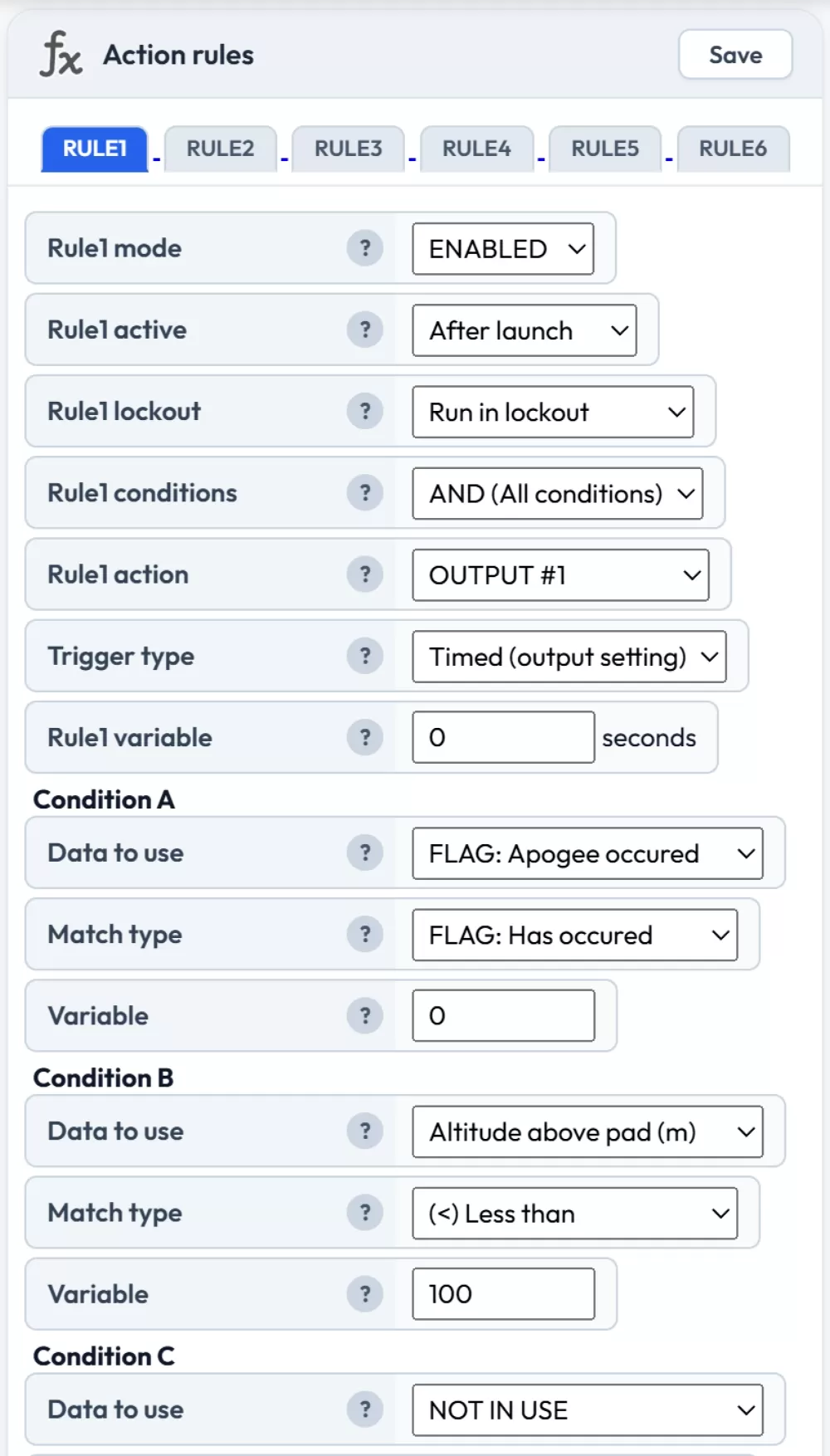
Dubbele inzameling op 100 meter na apogeum
Voorbeeld: Luchtstart van de tweede fase met kantelbeveiliging
Dit voorbeeld gebruikt twee regels om de tweede fase-motor te ontsteken met behulp van OUTPUT, 1 seconde na uitbrand, zolang de raket zich binnen 35 graden van verticaal bevindt. De tweede regel activeert een failsafe-hersteelsysteem met behulp van de GP6-soldeerbad ongeacht of de tweede fase werd ontstoken.
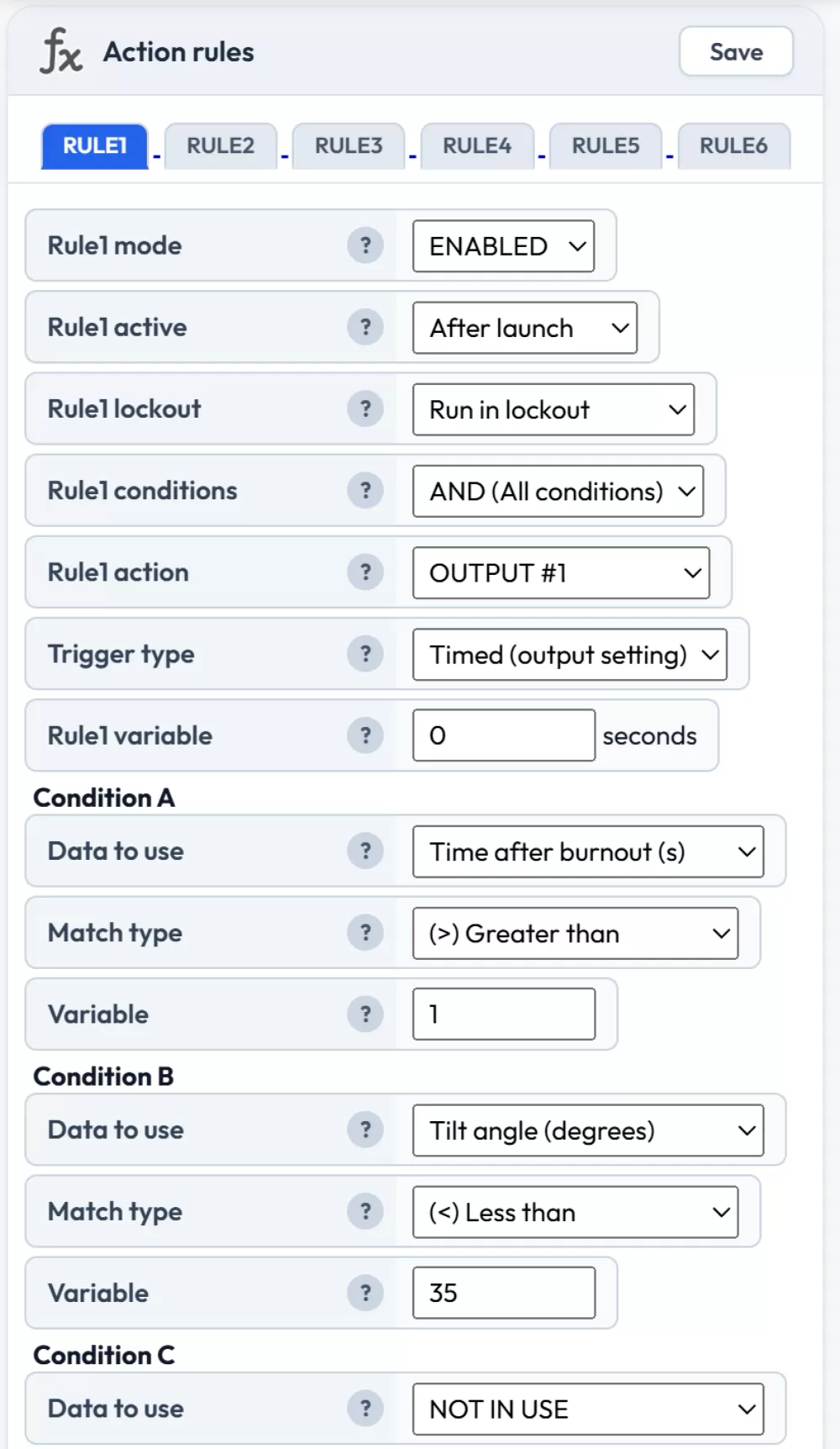
Regel 1: beveiligde luchtstart — activeert output 1 seconde na uitbrand als kanteling onder 35° ligt
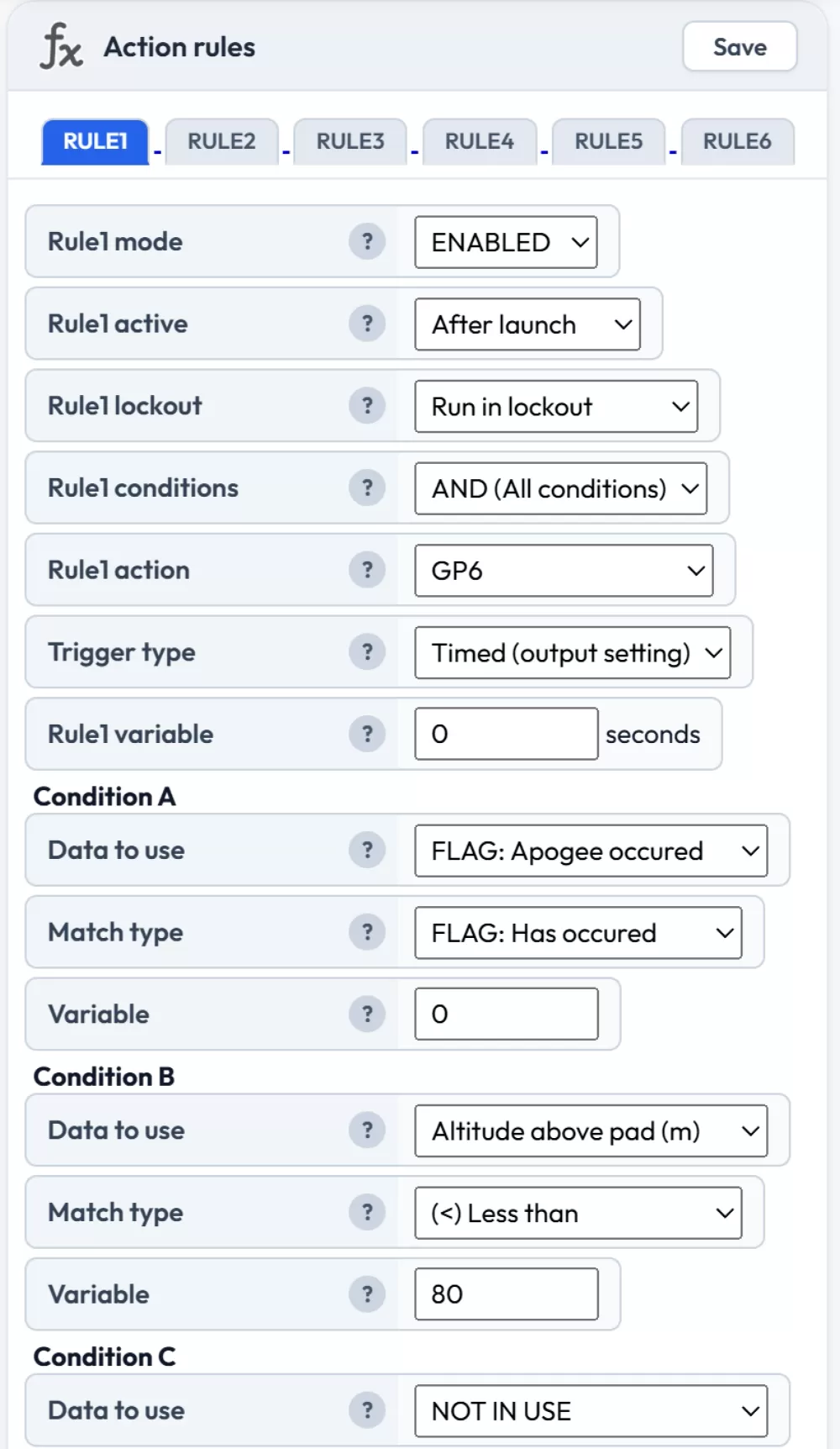
Regel 2: failsafe-herstel op 80 meter via GP6
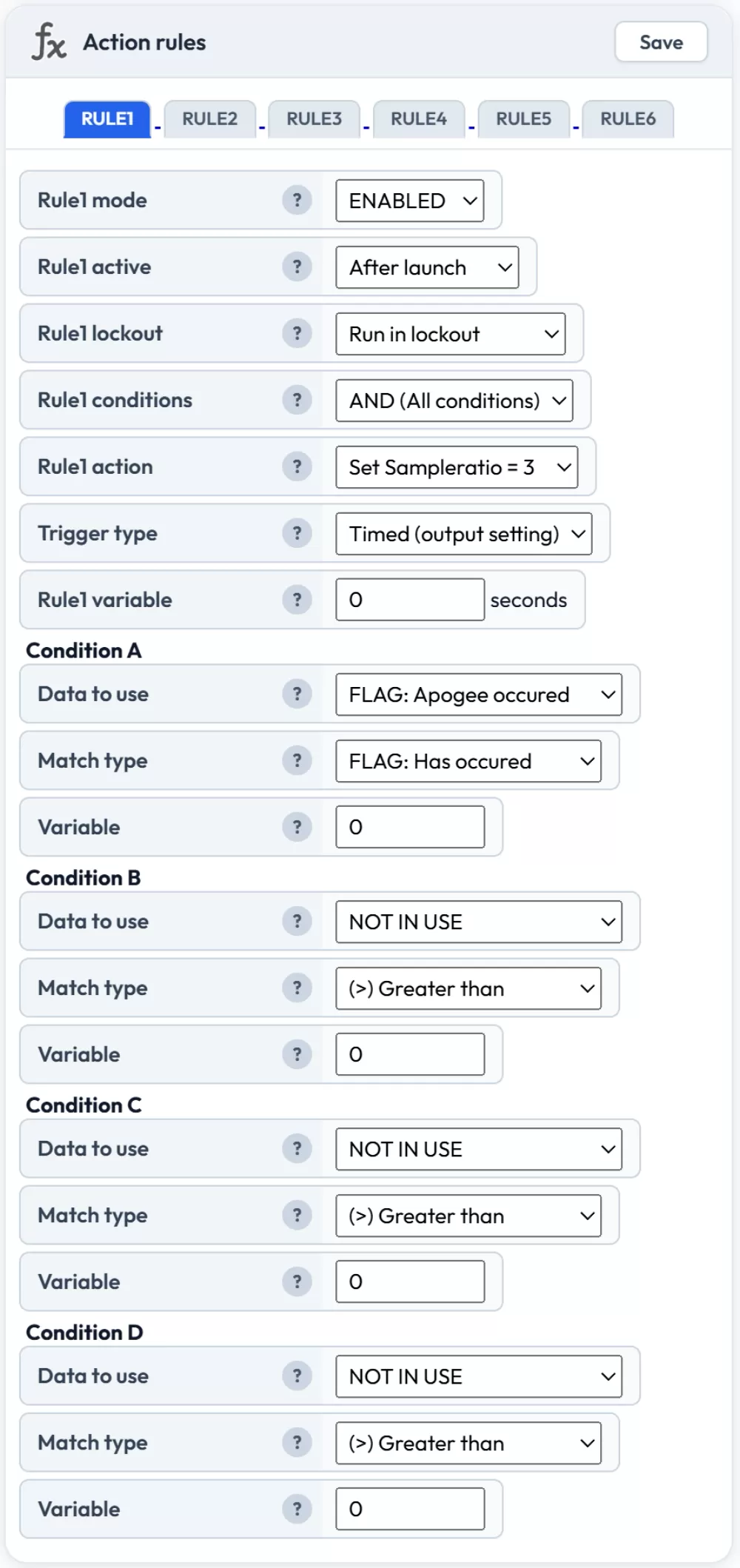
Voorbeeld: Bemonsteringsverhoudingsverhoging 20 seconden na apogeum
Dit voorbeeld verlaagt het logboekregistratiepercentage na de actieve vluchtfase om de totale opnametijd te verlengen. De bemonsteringsverhoudingsverhouding is ingesteld op 2 (elk ander monster loggen) wanneer 20 seconden na apogeum voorbij zijn.
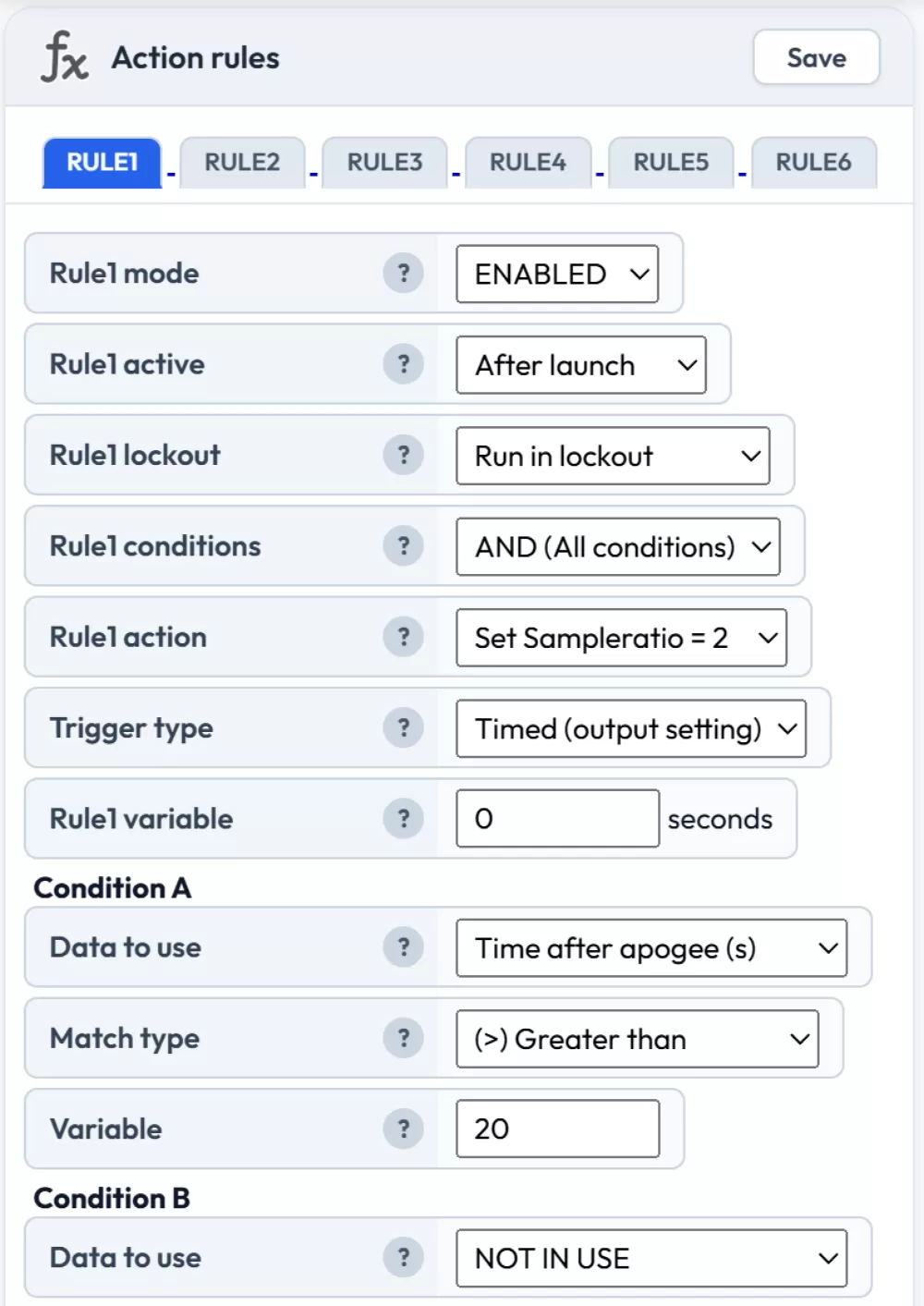
Een bemonsteringsverhoudingsverhouding van 2 betekent dat we elk ander monster in het vluchlogboek registreren
Voorbeeld: Blokkeerregels tot 10 seconden na lancering
Dit voorbeeld voorkomt dat alle andere regels worden uitgevoerd totdat 10 seconden na lancering zijn gedetecteerd. Handig als veiligheidsmaatregel om vervroegde inzamelingstriggering tijdens de versnellingsfase te voorkomen.
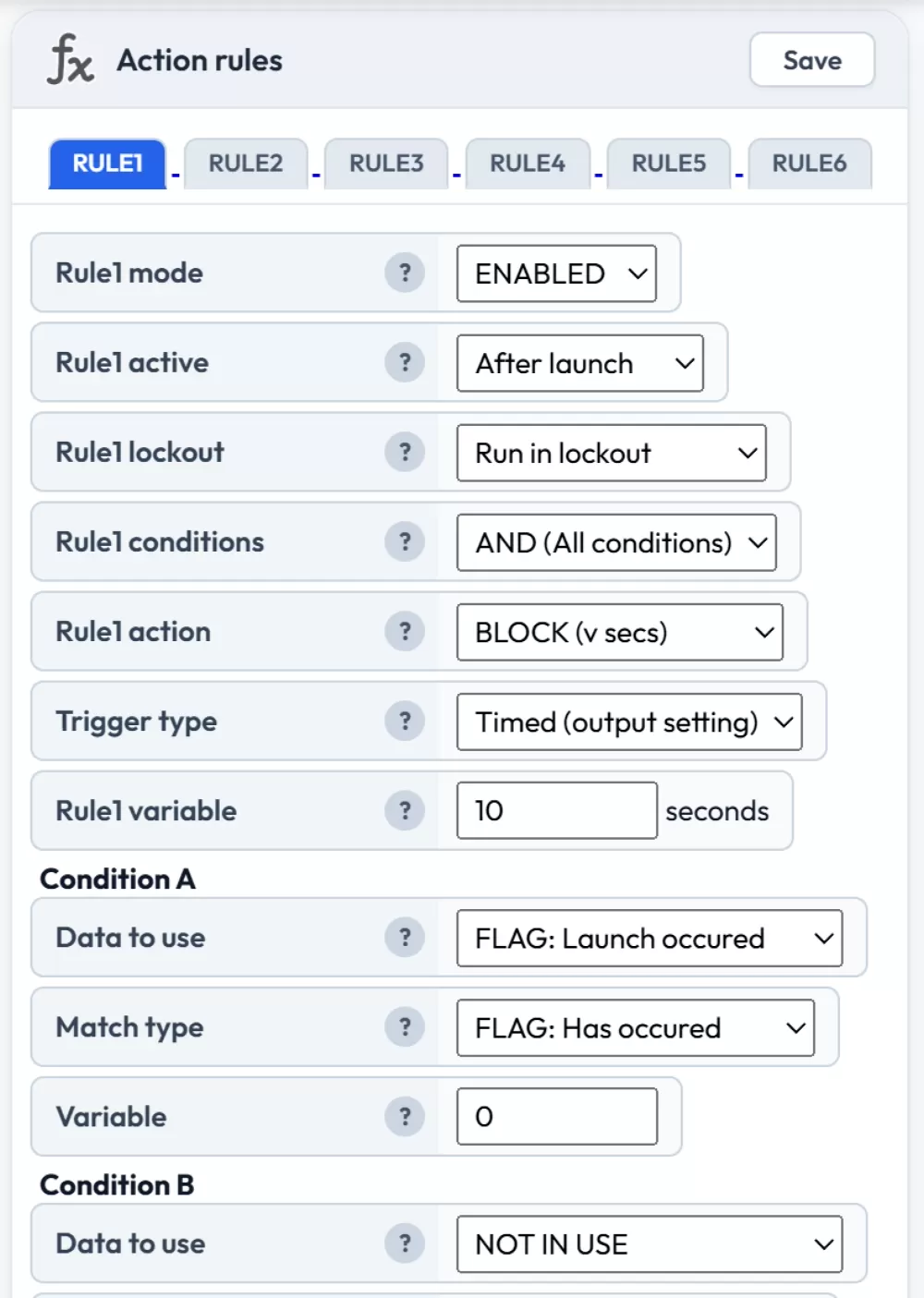
Gebruikt BLOK (v seconden) met de regelvariabele ingesteld op 10
Voorbeeld: Een I2C-servo gebruiken om een hersteelsysteem in te zetten
Dit voorbeeld activeert een servo om een hersteelsysteem in te zetten. Het wacht totdat minstens 4 seconden na lancering zijn gedetecteerd en totdat de snelheid onder 20 meter per seconde is gedaald.
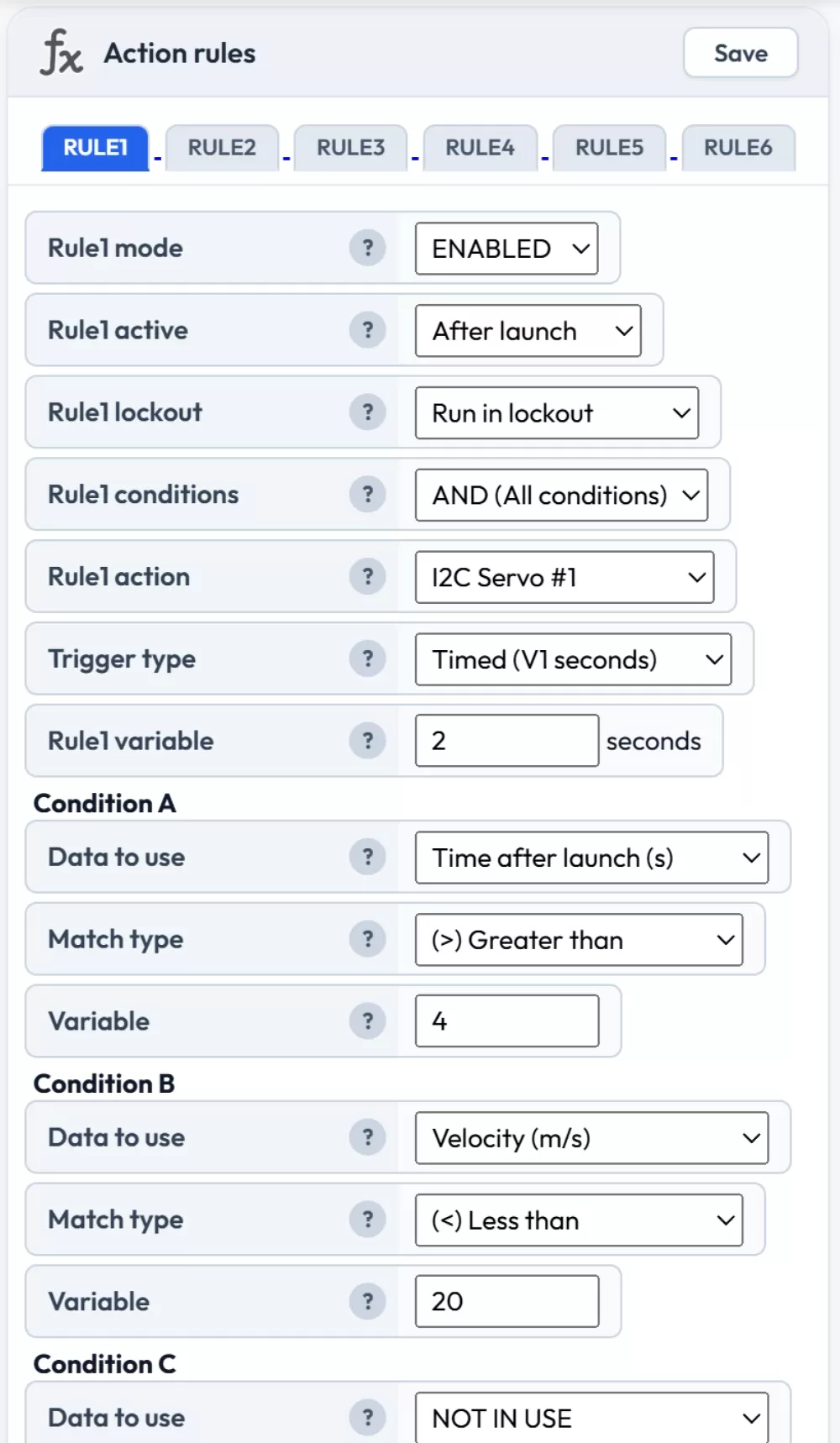
Configureer de servo's in de I2C Servo-expansie-instellingen
Voorbeeld: Vergrendel AAN / Vergrendel UIT voor continue output
Het vergrendelactiveringstype is handig wanneer u een output voor een onvoorspelbare duur ingeschakeld moet houden. U wilt bijvoorbeeld een zoemer activeren na landing en deze ingeschakeld houden totdat de accu onder een drempel daalt.
Regel 1: Stel de actie in op OUTPUT #1, activeringstype tot "Vergrendel AAN", met een voorwaarde van "MARKERING: Landing vond plaats" — "MARKERING: Heeft plaatsgevonden".
Regel 2: Stel de actie in op OUTPUT #1, activeringstype tot "Vergrendel UIT", met een voorwaarde van "Accu (%)" kleiner dan 10.
De output wordt ingeschakeld wanneer landing is gedetecteerd en blijft ingeschakeld totdat de accu onder 10% daalt.
Voorbeeld: Meervoudige fase-luchtstart met fase-detectie
Voor meervoudige raketfasen kunt u de fase-specifieke voorwaarden gebruiken om elke fase onafhankelijk te besturen. Bijvoorbeeld, om een tweede fase-motor 0,5 seconden na eerste fase-uitbrand met kantelbeveiliging te ontsteken:
Voorwaarde A: "MARKERING: Uitbrand vond plaats" — "MARKERING: Heeft plaatsgevonden"
Voorwaarde B: "Tijd na uitbrand (s)" groter dan 0,5
Voorwaarde C: "Kanthoek (graden)" kleiner dan 30
U kunt vervolgens "Tijd na ontsteking 2" en "MARKERING: Uitbrand 2 vond plaats" in latere regels gebruiken om herstelinzameling ten opzichte van het vluchprofiel van de tweede fase te beheren.
Voorbeeld: Dubbele inzameling met failsafe met behulp van (A+B) OF (C+D)
Met de gegroepeerde voorwaardenmodus kunt u een primaire trigger en een failsafe-back-up combineren in één regel. Bijvoorbeeld, om een hoofdparachute in te zetten op de normale hoogte of na een timeout:
Stel de voorwaardemodus in op (A+B) OF (C+D), vervolgens:
Voorwaarde A: "MARKERING: Apogeum vond plaats" — "MARKERING: Heeft plaatsgevonden"
Voorwaarde B: "Hoogte boven lunchplatform (m)" kleiner dan 150
Voorwaarde C: "Tijd na lancering (s)" groter dan 60
Voorwaarde D: "Snelheid (m/s)" kleiner dan 5
Dit activeert de output als (apogeum heeft plaatsgevonden EN hoogte is onder 150 m) OF (meer dan 60 seconden zijn verstreken sinds lancering EN de raket beweegt nauwelijks). Het tweede paar fungeert als failsafe voor het geval apogeum-detectie mislukt. Vereist firmware 2.3 of hoger.