Mercury pozwala skonfigurować sześć niestandardowych reguł, każdą z maksymalnie 4 warunkami. Mogą one kontrolować wyjścia, serwomechanizmy, hamulce powietrzne i zmieniać zmienne konfiguracyjne w razie potrzeby.
Dostępna jest również prosta opcja ustawienia kontroli wyjścia. Możesz używać jednego lub obu systemów, ponieważ działają niezależnie od siebie.
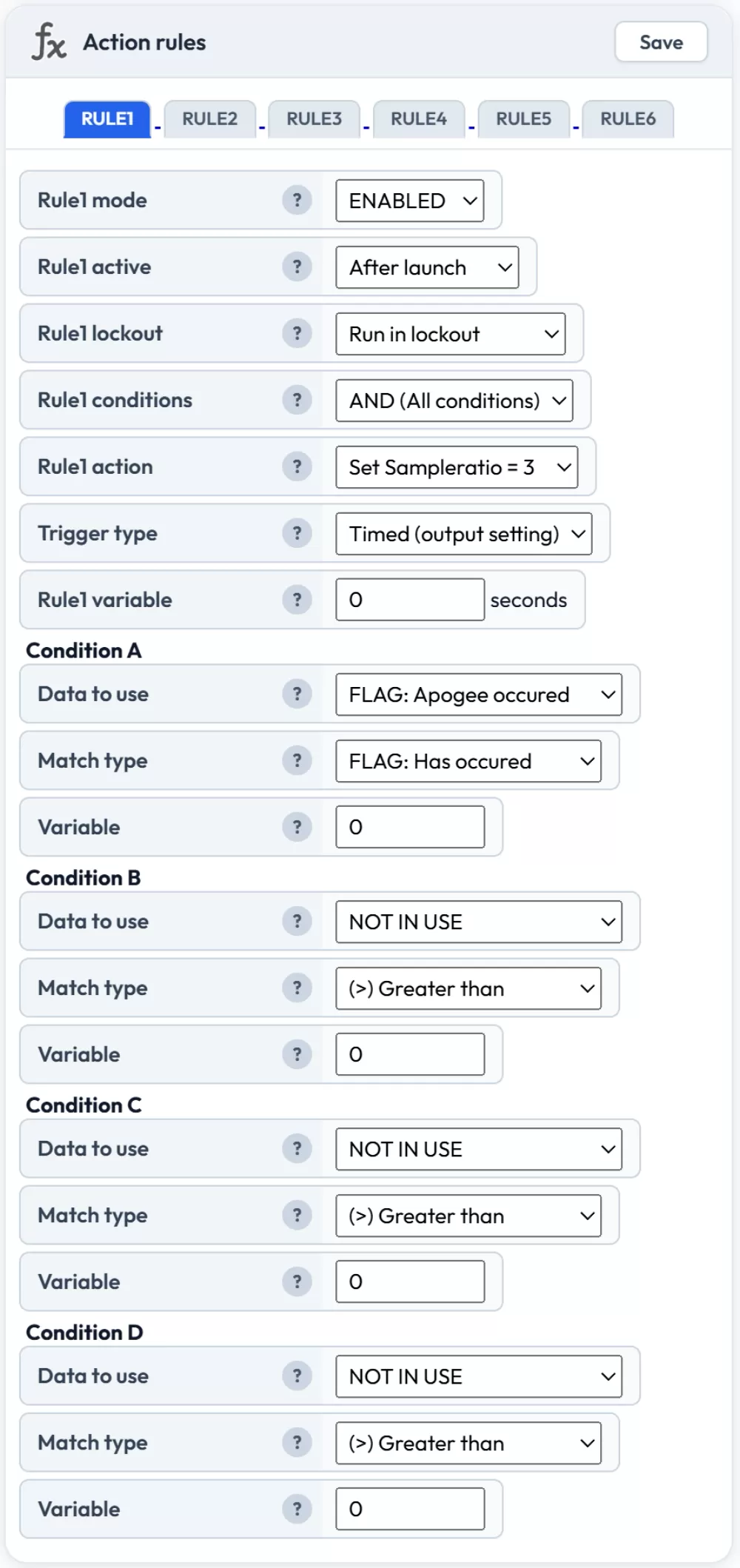
Pole konfiguracji reguły
Podczas wyzwalania wyjść lub serwomechanizmów, muszą być one najpierw skonfigurowane za pośrednictwem ustawień serwomechanizmów lub ustawień Output #1 na stronie ustawień. Reguły mogą następnie wyzwolić te wyjścia zgodnie z ich konfiguracją. Warto zauważyć, że główny czas włączenia wyjścia jest ustawiany w ustawieniach Output #1, nawet jeśli nie używasz prostego wyzwalacza wyjścia (możesz pozostawić go wyłączony, ale ustawić opcję czasu włączenia).
Podczas konfigurowania reguły musisz zmienić tryb z DISABLED na ENABLED i skonfigurować wszystkie ustawienia zgodnie z potrzebami. Możesz ustawić do 4 warunków dla każdej reguły i zdecydować, czy wszystkie warunki muszą być spełnione, czy też jakikolwiek pojedynczy warunek wystarczy do wyzwolenia reguły.
Ustawienia reguły
Tryb
Włącza lub wyłącza regułę. Aby użyć reguły, zmień to na włączone.
Aktywny
Kontroluje, kiedy reguła może się uruchomić. Wybierz, czy reguła jest zawsze aktywna (nawet czekając na wyrzutni przed startem) czy tylko aktywna po wykryciu startu. W przypadku większości reguł wdrażania będziesz chcieć "tylko po starcie".
Blokada
Jeśli altimetr wykryje szybki wzrost ciśnienia (na przykład z ładunku wyrzutowego lub przejścia naddźwiękowego), przechodzi w tryb blokady. Podczas blokady wysokość jest uważana za zawodną i altimetr odkłada podejmowanie decyzji, które mogą być błędne. Można to skonfigurować w ustawieniach lotu.
Użyj tego ustawienia, aby zdecydować, czy twoja reguła powinna uruchamiać się podczas blokady (przydatne dla funkcji niezatknięte przez ciśnienie, takich jak wyzwalacze czasowe) czy tylko poza blokadami.
Warunki (AND / OR / Pogrupowane)
Kontroluje sposób oceny wielu warunków:
AND (Wszystkie warunki) — reguła będzie wyzwolona tylko wtedy, gdy każdy warunek (A, B, C, D) jest spełniony jednocześnie podczas tego samego cyklu.
OR (Dowolny warunek) — reguła będzie wyzwolona, jeśli spełniony jest jakikolwiek pojedynczy warunek.
(A+B) OR (C+D) — warunki A i B muszą być oba prawdziwe, LUB warunki C i D muszą być oba prawdziwe. To daje ci dwie niezależne pary warunków w jednej regule. Na przykład, można wyzwolić wyjście jeśli (apogeum miało miejsce I wysokość jest poniżej 100m) LUB (czas od startu przekracza 60 sekund I prędkość jest poniżej 5 m/s) — obejmując zarówno normalne podwójne wdrażanie jak i failsafe timeout w jednej regule. Wymaga firmware'u 2.3 lub nowszego.
Działanie
To mówi regule, co zrobić, gdy spełnione są jej warunki. Dostępne działania to:
- OUTPUT #1 — uruchamia wbudowane wyjście wysokoprądowe
- GP6 — aktywuje wyjście padów lutowniczych GP6 lub serwomechanizm
- GP7 — aktywuje wyjście padów lutowniczych GP7 lub serwomechanizm
- BLOCK (perm) — na stałe blokuje wszystkie inne reguły przed uruchomieniem przez resztę lotu
- BLOCK (v secs) — blokuje wszystkie inne reguły na liczbę sekund określoną w polu zmiennej
- End recording — natychmiast zatrzymuje rejestrowanie lotu
- Set Sample ratio = 1, 2, 3, 5, 10 — zmienia szybkość rejestrowania w trakcie lotu, aby przedłużyć czas nagrywania
- I2C Servo #1 do #6 — wyzwala jeden z 6 kanałów na rozszerzającej karcie serwomechanizmów PCA9685
- Airbrake OFF — wyłącza system hamulca powietrznego
- Airbrake ON — włącza system hamulca powietrznego
- ROC2 OUT1 — uruchamia kanał 1 na rozszerzającej karcie wyjścia wysokoprądowego ROC2
- ROC2 OUT2 — uruchamia kanał 2 na rozszerzającej karcie wyjścia wysokoprądowego ROC2
Typ wyzwalacza
Kontroluje sposób zachowania się działania po wyzwoleniu. To jest nowsze dodanie, które daje ci znacznie większą elastyczność:
- Timed (output setting) — uruchamia się na czas określony w polu ustawień wyjścia lub serwomechanizmu. To jest klasyczne zachowanie.
- Timed (V1 seconds) — uruchamia się na liczbę sekund określoną w polu zmiennej reguły poniżej. To pozwala każdej regule mieć jej własny niezależny czas włączenia bez zmiany ustawień wyjścia.
- Latch ON — włącza wyjście i utrzymuje je włączone, aż oddzielna reguła z Latch OFF się uruchomi. Przydatne dla rzeczy, które muszą pozostać aktywne na nieprzewidywalny czas.
- Latch OFF — natychmiast wyłącza wyjście. Użyj tego w połączeniu z regułą Latch ON, aby utworzyć pary włączenia/wyłączenia kontrolowane przez różne warunki.
Zmienna
Jeśli twoja reguła wymaga zmiennej, wprowadź ją tutaj. Dla "BLOCK (v secs)" to jest liczba sekund do zablokowania. Dla "Timed (V1 seconds)" to jest czas włączenia w sekundach. Wyjścia i serwomechanizmy, które używają własnego skonfigurowanego czasu włączenia, nie potrzebują tego pola.
Warunki
Każda reguła ma do 4 warunków. Musisz określić co najmniej 1 warunek, aby reguła działała. Każdy warunek ma 3 opcje do ustawienia.
Dane do użycia
To określa, jakie dane lotu warunek sprawdza. Dostępne opcje to:
Dane sensora i lotu:
- Altitude above pad (m) — bieżąca wysokość względem wyrzutni
- Acc magnitude (G) — całkowita wielkość przyspieszenia na wszystkich osiach
- Acc X / Y / Z (G) — przyspieszenie na poszczególnych osiach
- Highest Gyro axis (dps) — najwyższa szybkość rotacji na wszystkich osiach żyroskopu
- Gyro X / Y / Z (dps) — szybkość rotacji na poszczególnych osiach
- Tilt angle (degrees) — kąt od pionu
- Roll / Pitch / Yaw angle (degrees) — poszczególne kąty orientacji
- Velocity (m/s) — bieżąca prędkość wznoszenia lub opadania
- Battery (%) — bieżący poziom naładowania baterii
- Board temperature (°C) — temperatura z czujnika ciśnienia
- MT1 temperature (°C) — temperatura z zewnętrznego czujnika MT1 (jeśli podłączony)
Oparte na czasie:
- Time after launch (s) — sekundy od wykrycia startu
- Time after apogee (s) — sekundy od apogeum
- Time after landing (s) — sekundy od wykrycia lądowania
- Time after burnout (s) — sekundy od wypalenia silnika
Prognoza i hamulce powietrzne:
- Predicted apogee (m) — bieżąca oszacowana wysokość apogeum podczas fazy szybowu
- Air brake on percent (%) — jak daleko są aktualnie rozłożone hamulce powietrzne (0–100%)
Wieloetapowe (firmware 2.3+):
- Time after burnout 2 / 3 / 4 (s) — sekundy od wypalenia 2., 3. lub 4. etapu
- Time after ignition 2 / 3 / 4 (s) — sekundy od zapłonu 2., 3. lub 4. etapu
- Stage count — liczba dotychczas wykrytych etapów
Flagi zdarzeń:
- FLAG: Launch occurred
- FLAG: Apogee occurred
- FLAG: Burnout occurred
- FLAG: Landing occurred
- FLAG: Burnout 2 / 3 / 4 occurred (wieloetapowe)
- FLAG: Ignition 2 / 3 / 4 occurred (wieloetapowe)
Typ dopasowania
To mówi regule, jak porównać wybrane dane względem wartości zmiennej:
- (>) Greater than
- (>=) Greater or equal
- (=) Equal
- (!=) Not equal
- (<) Less than
- (<=) Less or equal
- FLAG: Has occurred — używaj z opcjami danych FLAG
- FLAG: Has not occurred — używaj z opcjami danych FLAG
Zmienna warunku
Wartość progowa do porównania. Na przykład, jeśli dopasowujesz, gdy wysokość spada poniżej 80 metrów, wprowadź tutaj 80. Nie jest potrzebne dla warunków FLAG.
Przykład: Wyzwolić wyjście po apogeum i poniżej 100 metrów
Ten przykład można użyć do podwójnego wdrażania, gdzie twój silnik wyrzucił pierwszą małą spadochron i chcesz użyć wyjścia do wyzwolenia drugiej spadochronu, gdy rakieta spada poniżej 100 metrów.
Ustaw pierwszy warunek na "FLAG: Apogee occurred" z typem dopasowania "FLAG: Has occurred". Ustaw drugi warunek na "Altitude above pad (m)" mniej niż 100.
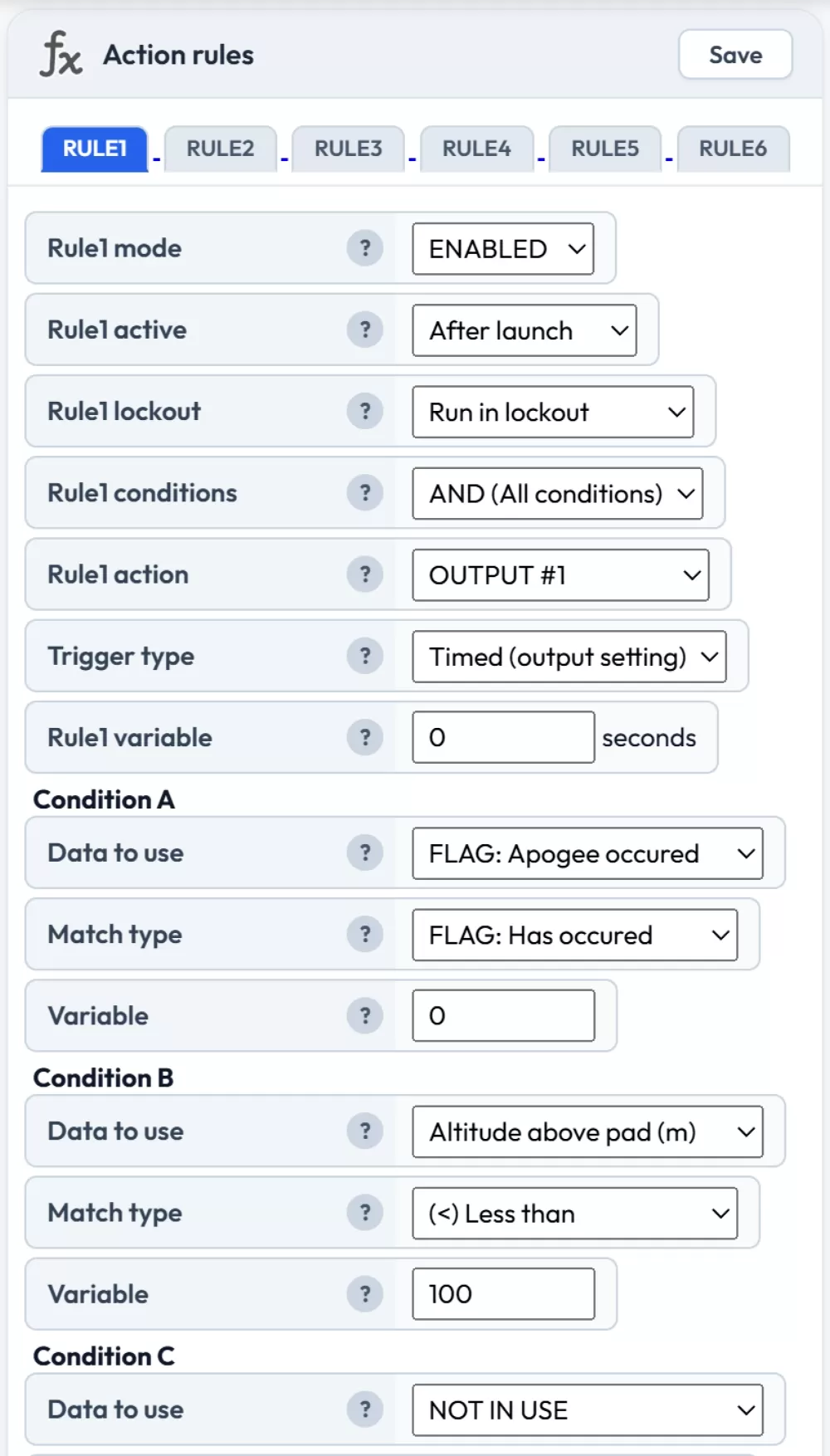
Podwójne wdrażanie na 100 metrach po apogeum
Przykład: Uruchomienie drugiego etapu z ochroną przechyłu
Ten przykład używa dwóch reguł do zapalenia drugiego silnika etapu za pomocą OUTPUT, 1 sekund po wypaleniu, o ile rakieta jest w granicach 35 stopni od pionu. Druga reguła wyzwala failsafe system ratunkowy za pomocą padów lutowniczych GP6 niezależnie od tego, czy drugi etap został zapalony.
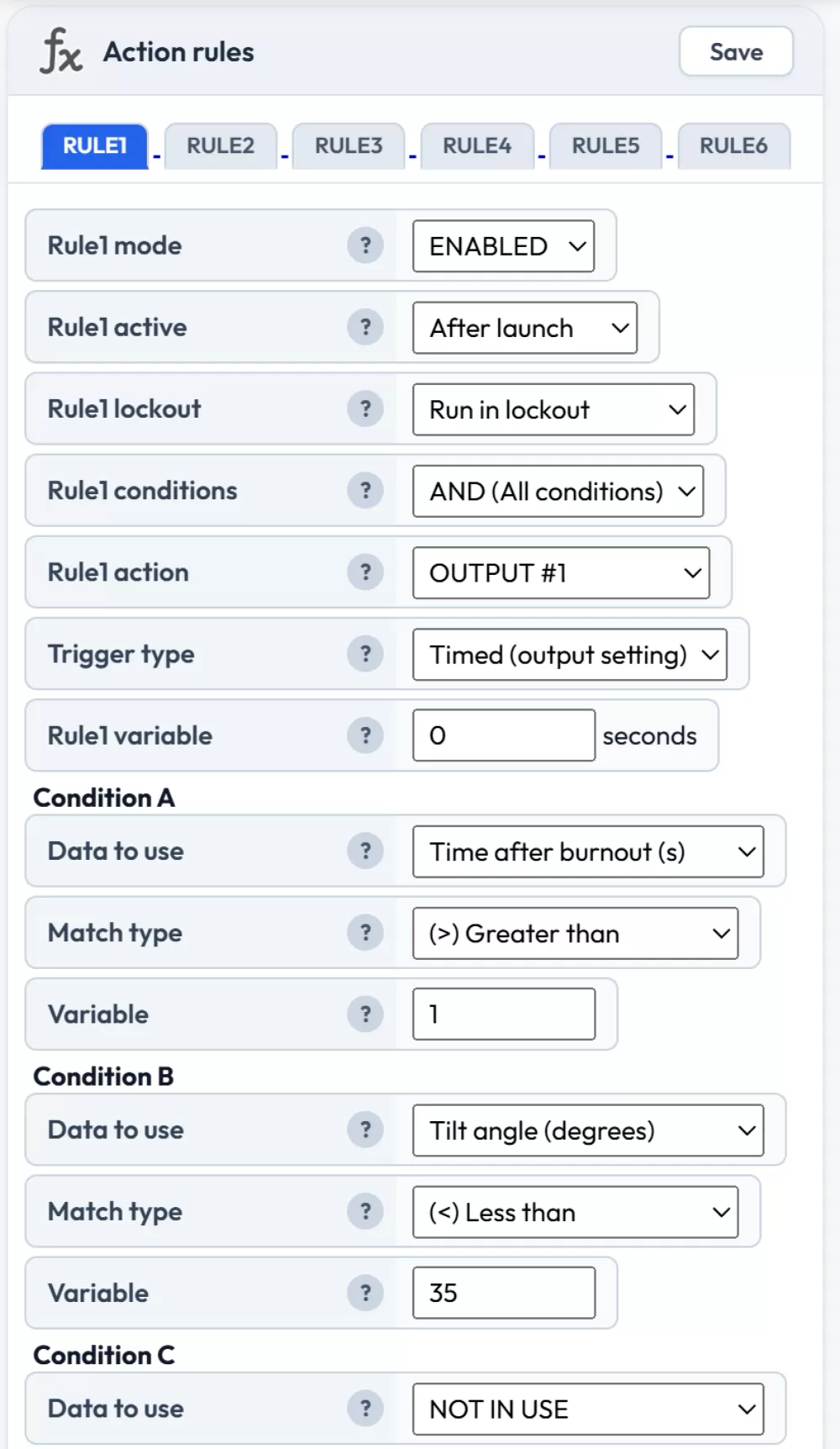
Reguła 1: chroniony start powietrzny — uruchamia output 1 sekund po wypaleniu, jeśli przechył jest poniżej 35°
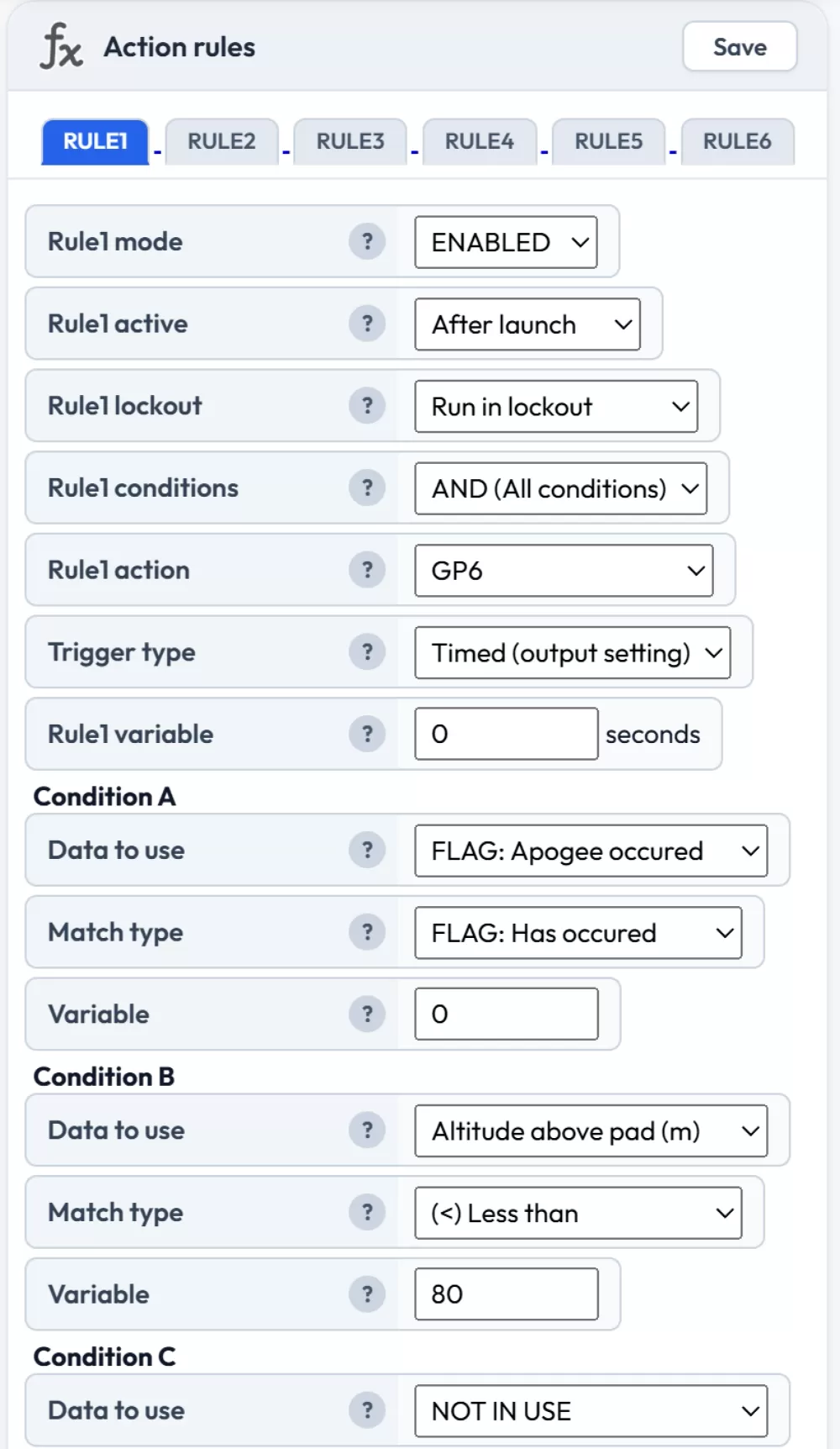
Reguła 2: failsafe ratowanie na 80 metrach za pośrednictwem GP6
Przykład: Zwiększenie współczynnika próbkowania 20 sekund po apogeum
Ten przykład zmniejsza szybkość rejestrowania po aktywnej fazie lotu, aby przedłużyć całkowity czas rejestrowania. Współczynnik próbkowania jest ustawiony na 2 (rejestrowanie każdej drugiej próbki), gdy upłynęło 20 sekund od apogeum.
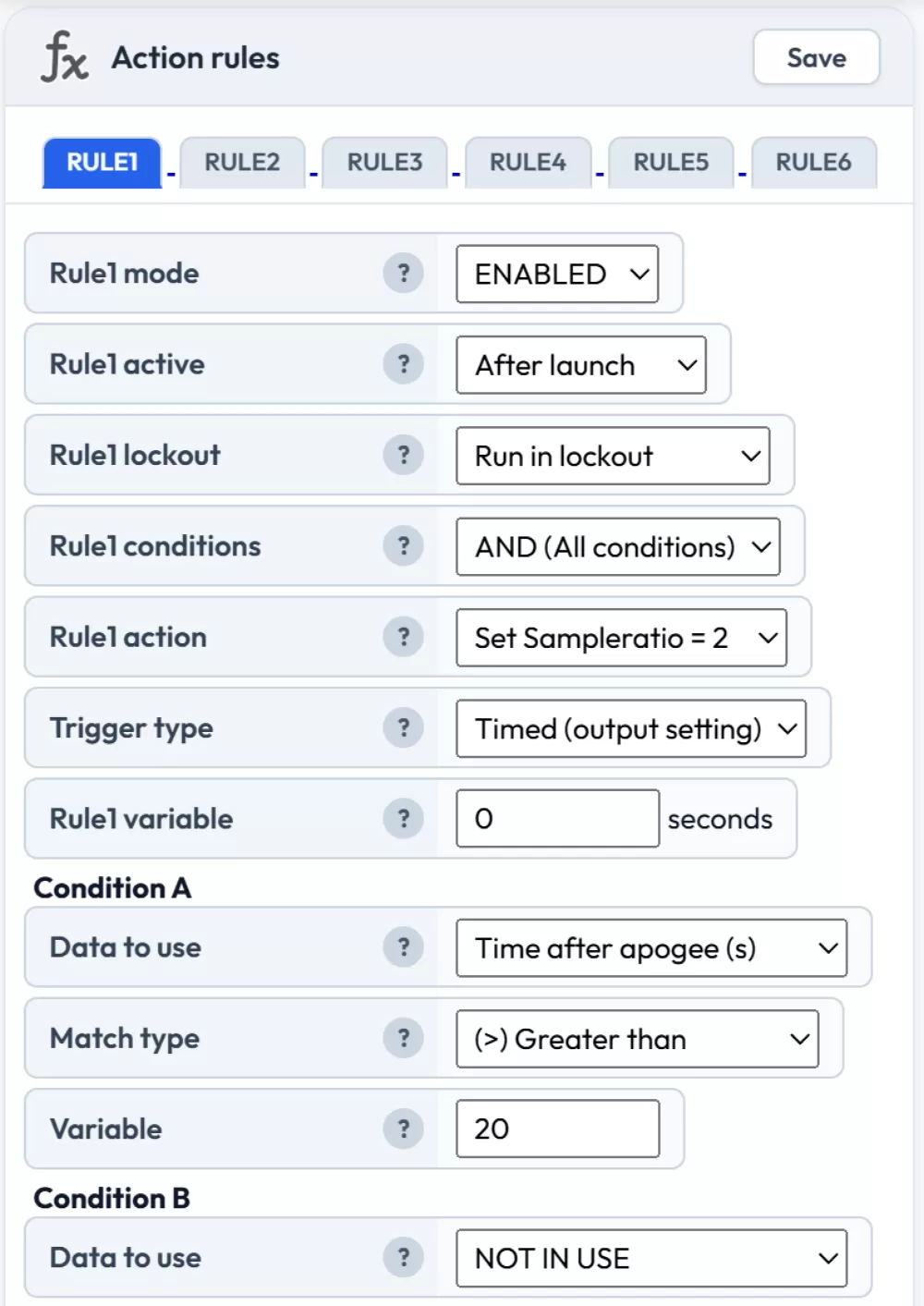
Współczynnik próbkowania 2 oznacza, że rejestrujemy każdą drugą próbkę do dziennika lotu
Przykład: Blokowanie reguł do 10 sekund po starcie
Ten przykład zapobiega uruchamianiu się wszystkich innych reguł aż do 10 sekund po wykryciu startu. Przydatne jako środek bezpieczeństwa, aby uniknąć przedwczesnego wyzwolenia wdrażania podczas fazy wzrostu.
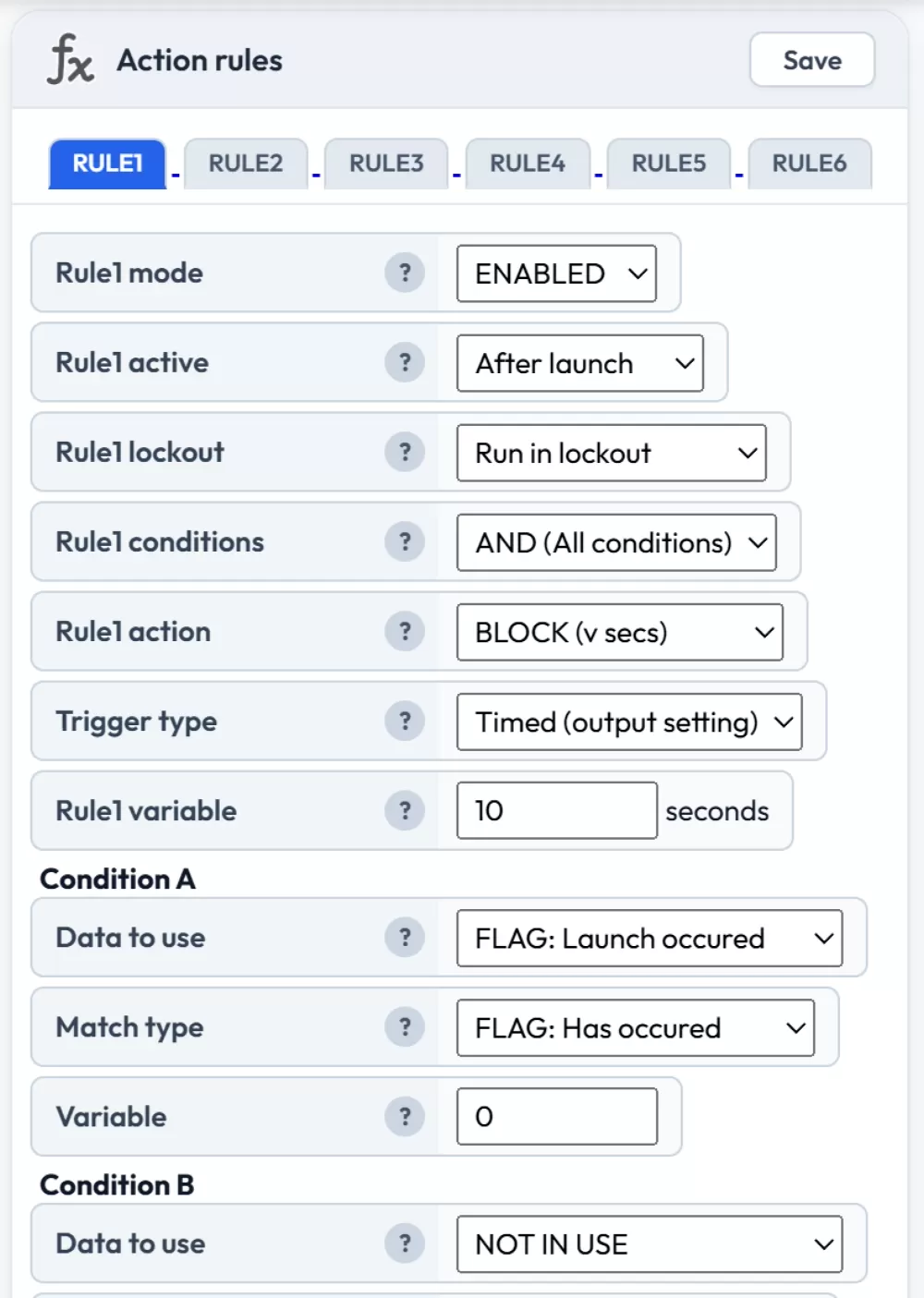
Używa BLOCK (v secs) ze zmienną reguły ustawioną na 10
Przykład: Użyj serwomechanizmu I2C do wdrażania systemu ratunkowego
Ten przykład wyzwala serwomechanizm do wdrażania systemu ratunkowego. Czeka aż co najmniej 4 sekund od wykrycia startu i aż prędkość spadnie poniżej 20 metrów na sekundę.
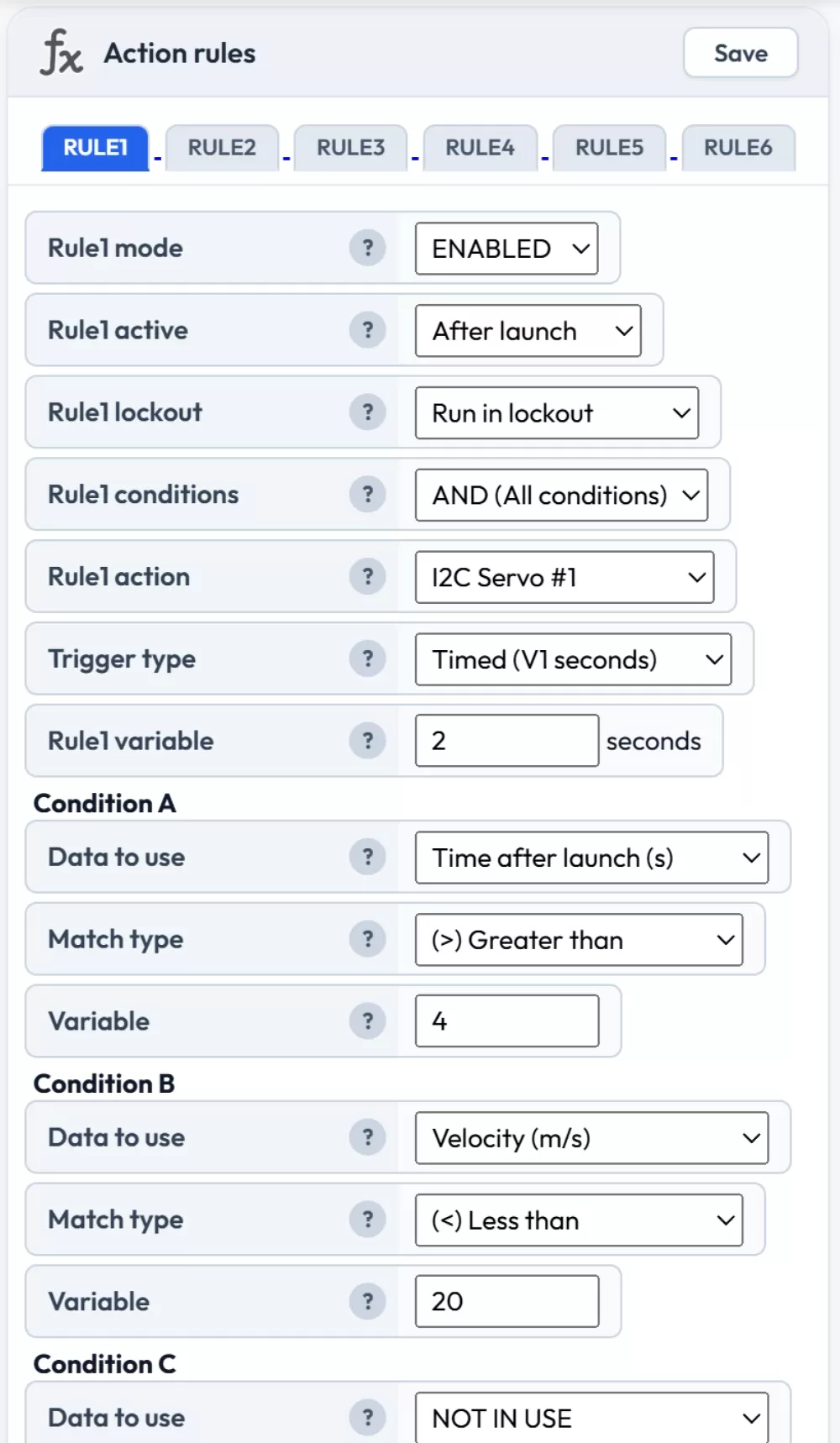
Skonfiguruj serwomechanizmy w ustawieniach rozszerzenia I2C Servo
Przykład: Latch ON / Latch OFF dla stałego wyjścia
Typ wyzwalacza latch jest przydatny, gdy potrzebujesz, aby wyjście pozostało włączone na nieprzewidywalny czas. Na przykład możesz chcieć aktywować brzęczyk po lądowaniu i utrzymać go włączonego, aż bateria spadnie poniżej progu.
Reguła 1: Ustaw działanie na OUTPUT #1, typ wyzwalacza na "Latch ON", z warunkiem "FLAG: Landing occurred" — "FLAG: Has occurred".
Reguła 2: Ustaw działanie na OUTPUT #1, typ wyzwalacza na "Latch OFF", z warunkiem "Battery (%)" mniej niż 10.
Wyjście włączy się po wykryciu lądowania i pozostanie włączone aż bateria spadnie poniżej 10%.
Przykład: Wieloetapowy start powietrzny z detektorem etapów
W przypadku rakiet wieloetapowych możesz użyć warunków specyficznych dla etapu, aby kontrolować każdy etap niezależnie. Na przykład, aby zapalić silnik drugiego etapu 0,5 sekund po wypaleniu pierwszego etapu z ochroną przechyłu:
Warunek A: "FLAG: Burnout occurred" — "FLAG: Has occurred"
Warunek B: "Time after burnout (s)" większe niż 0.5
Warunek C: "Tilt angle (degrees)" mniej niż 30
Następnie możesz użyć "Time after ignition 2" i "FLAG: Burnout 2 occurred" w kolejnych regułach, aby zarządzać wdrażaniem ratunkowym względem profilu lotu drugiego etapu.
Przykład: Podwójne wdrażanie z failsafe przy użyciu (A+B) OR (C+D)
Tryb warunku pogrupowanego pozwala połączyć wyzwalacz pierwotny i failsafe backup w jedną regułę. Na przykład, aby wdrażać główny spadochron na normalnej wysokości lub po timeout:
Ustaw tryb warunków na (A+B) OR (C+D), następnie:
Warunek A: "FLAG: Apogee occurred" — "FLAG: Has occurred"
Warunek B: "Altitude above pad (m)" mniej niż 150
Warunek C: "Time after launch (s)" większe niż 60
Warunek D: "Velocity (m/s)" mniej niż 5
To uruchamia wyjście jeśli (apogeum miało miejsce I wysokość jest poniżej 150m) LUB (upłynęło więcej niż 60 sekund od startu I rakieta prawie się nie porusza). Druga para działa jako failsafe na wypadek, gdyby detektja apogeum zawiodła. Wymaga firmware'u 2.3 lub nowszego.