O Mercury permite configurar seis regras personalizadas, cada uma com até 4 condições. Estas podem controlar saídas, servos, freios aerodinâmicos e alterar variáveis de configuração conforme necessário.
Existe também uma opção de configuração de controle de saída simples. Você pode usar um ou ambos os sistemas, pois funcionam independentemente um do outro.
A caixa de configuração de regras
Ao acionar saídas ou servos, estes precisam ser configurados primeiro através das configurações de servo ou das configurações de Saída #1 na página de configurações. As regras podem então acionar estas saídas conforme configuradas. Vale notar que o tempo de ativação da saída principal é definido nas configurações de Saída #1, mesmo que você não esteja usando o acionador de saída simples (você pode deixá-lo desativado, mas apenas defina a opção de tempo ATIVADO).
Ao configurar uma regra, você precisa alterar o modo de DESATIVADO para ATIVADO e configurar todas as configurações conforme necessário. Você pode definir até 4 condições para cada regra e decidir se todas as condições devem ser atendidas ou se uma única condição é suficiente para acionar a regra.
Configurações de regra
Modo
Ativa ou desativa a regra. Para usar uma regra, altere isso para ativado.
Ativo
Controla quando a regra pode funcionar. Escolha se a regra está sempre ativa (mesmo enquanto aguarda na plataforma antes do lançamento) ou ativa apenas após o lançamento ser detectado. Para a maioria das regras de implantação, você desejará "apenas após o lançamento".
Bloqueio
Se o altímetro detectar um aumento rápido de pressão (como de uma carga de ejeção ou transição supersônica), ele entra em modo de bloqueio. Durante o bloqueio, a altitude é considerada não confiável e o altímetro adia a tomada de decisões que pode cometer erros. Isso pode ser configurado nas configurações de voo.
Use esta configuração para decidir se sua regra deve funcionar durante o bloqueio (útil para funções não afetadas pela pressão, como acionadores baseados em tempo) ou se deve funcionar apenas fora dos bloqueios.
Condições (AND / OR / Agrupadas)
Controla como múltiplas condições são avaliadas:
AND (Todas as condições) — a regra será acionada apenas se todas as condições (A, B, C, D) forem atendidas simultaneamente durante o mesmo ciclo.
OR (Qualquer condição) — a regra será acionada se qualquer condição for atendida.
(A+B) OR (C+D) — as condições A e B devem ser verdadeiras, OU as condições C e D devem ser verdadeiras. Isso oferece dois pares de condições independentes em uma única regra. Por exemplo, você poderia acionar uma saída se (apogeu ocorreu E altitude está abaixo de 100 m) OU (tempo após lançamento excede 60 segundos E velocidade está abaixo de 5 m/s) — cobrindo tanto um duplo enfunelamento normal quanto um failsafe por tempo limite em uma regra. Requer firmware 2.3 ou posterior.
Ação
Isto diz à regra o que fazer quando suas condições forem atendidas. As ações disponíveis são:
- SAÍDA #1 — aciona a saída de alta corrente integrada
- GP6 — ativa a saída ou servo do contato soldado GP6
- GP7 — ativa a saída ou servo do contato soldado GP7
- BLOQUEAR (perm) — bloqueia permanentemente todas as outras regras de funcionarem pelo resto do voo
- BLOQUEAR (v segs) — bloqueia todas as outras regras pelo número de segundos especificado no campo de variável
- Encerrar gravação — interrompe a gravação de voo imediatamente
- Definir taxa de amostragem = 1, 2, 3, 5, 10 — altera a taxa de logging durante o voo para estender o tempo de gravação
- Servo I2C #1 a #6 — aciona um dos 6 canais na placa de expansão de servo PCA9685
- Freio aerodinâmico DESATIVADO — desativa o sistema de freio aerodinâmico
- Freio aerodinâmico ATIVADO — ativa o sistema de freio aerodinâmico
- ROC2 OUT1 — aciona o canal 1 na placa de expansão de saída de alta corrente ROC2
- ROC2 OUT2 — aciona o canal 2 na placa de expansão de saída de alta corrente ROC2
Tipo de acionador
Controla como a ação se comporta quando acionada. Esta é uma adição mais recente que oferece muito mais flexibilidade:
- Cronometrado (configuração de saída) — aciona pela duração configurada nas configurações de saída ou servo. Este é o comportamento clássico.
- Cronometrado (V1 segundos) — aciona pelo número de segundos especificado no campo de variável da regra abaixo. Isso permite que cada regra tenha seu próprio tempo de ativação independente sem alterar as configurações de saída.
- Travar ATIVADO — ativa a saída e a mantém ativada até que uma regra separada com Travar DESATIVADO seja acionada. Útil para coisas que precisam permanecer ativas por uma duração imprevisível.
- Travar DESATIVADO — desativa a saída imediatamente. Use isso em combinação com uma regra Travar ATIVADO para criar pares liga/desliga controlados por diferentes condições.
Variável
Se sua regra requer uma variável, insira-a aqui. Para "BLOQUEAR (v segs)" este é o número de segundos a bloquear. Para "Cronometrado (V1 segundos)" este é o tempo de ativação em segundos. Saídas e servos que usam seu próprio tempo de ativação configurado não precisam deste campo.
Condições
Cada regra tem até 4 condições. Você precisa especificar pelo menos 1 condição para uma regra funcionar. Cada condição tem 3 opções para definir.
Dados a usar
Isto especifica quais dados de voo a condição verifica. As opções disponíveis são:
Dados de sensor e voo:
- Altitude acima da plataforma (m) — altitude atual relativa à plataforma de lançamento
- Magnitude de aceleração (G) — magnitude total de aceleração em todos os eixos
- Aceleração X / Y / Z (G) — aceleração em eixos individuais
- Eixo giroscópico mais alto (dps) — a maior taxa de rotação em todos os eixos giroscópicos
- Giroscópio X / Y / Z (dps) — taxa de rotação em eixos individuais
- Ângulo de inclinação (graus) — ângulo da vertical
- Ângulo de rolagem / arfagem / guinada (graus) — ângulos de orientação individuais
- Velocidade (m/s) — velocidade atual de ascensão ou descida
- Bateria (%) — nível atual de carga da bateria
- Temperatura da placa (°C) — temperatura do sensor de pressão
- Temperatura MT1 (°C) — temperatura do sensor externo MT1 (se conectado)
Baseado em tempo:
- Tempo após lançamento (s) — segundos desde que o lançamento foi detectado
- Tempo após apogeu (s) — segundos desde o apogeu
- Tempo após pouso (s) — segundos desde que o pouso foi detectado
- Tempo após queima do motor (s) — segundos desde a queima do motor
Predição e freios aerodinâmicos:
- Apogeu predito (m) — a altitude de apogeu estimada atual durante a fase de planejamento
- Freio aerodinâmico ativado percentual (%) — quão longe os freios aerodinâmicos estão atualmente implantados (0–100%)
Multi-estágio (firmware 2.3+):
- Tempo após queima do motor 2 / 3 / 4 (s) — segundos desde a queima do motor 2º, 3º ou 4º estágio
- Tempo após ignição 2 / 3 / 4 (s) — segundos desde a ignição do 2º, 3º ou 4º estágio
- Contagem de estágios — o número de estágios detectados até o momento
Sinalizadores de eventos:
- SINALIZADOR: Lançamento ocorreu
- SINALIZADOR: Apogeu ocorreu
- SINALIZADOR: Queima do motor ocorreu
- SINALIZADOR: Pouso ocorreu
- SINALIZADOR: Queima do motor 2 / 3 / 4 ocorreu (multi-estágio)
- SINALIZADOR: Ignição 2 / 3 / 4 ocorreu (multi-estágio)
Tipo de correspondência
Isto diz à regra como comparar os dados escolhidos com seu valor de variável:
- (>) Maior que
- (>=) Maior ou igual
- (=) Igual
- (!=) Não igual
- (<) Menor que
- (<=) Menor ou igual
- SINALIZADOR: Ocorreu — use com opções de dados SINALIZADOR
- SINALIZADOR: Não ocorreu — use com opções de dados SINALIZADOR
Variável de condição
O valor limite para comparar. Por exemplo, se você está combinando quando a altitude cai abaixo de 80 metros, insira 80 aqui. Não necessário para condições SINALIZADOR.
Exemplo: Acionar a saída após apogeu e abaixo de 100 metros
Este exemplo poderia ser usado para um duplo enfunelamento onde seu motor ejetou o primeiro pequeno paraquedas e você deseja usar a saída para acionar um paraquedas secundário quando o foguete cai abaixo de 100 metros.
Defina a primeira condição como "SINALIZADOR: Apogeu ocorreu" com tipo de correspondência "SINALIZADOR: Ocorreu". Defina a segunda condição como "Altitude acima da plataforma (m)" menor que 100.
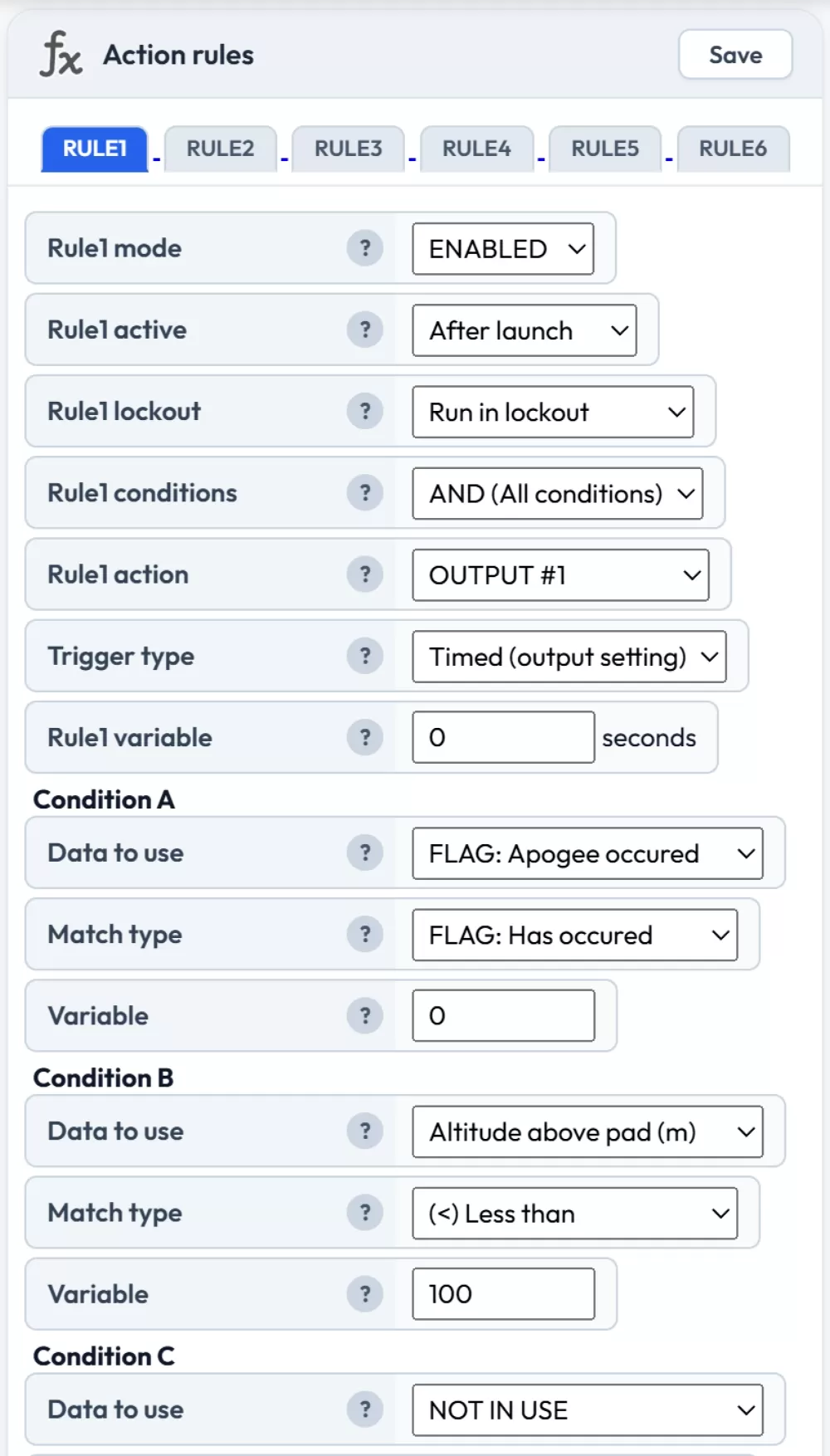
Duplo enfunelamento em 100 metros após apogeu
Exemplo: Iniciação aérea do segundo estágio com proteção de inclinação
Este exemplo usa duas regras para acionar o motor do segundo estágio usando a SAÍDA, 1 segundo após a queima, desde que o foguete esteja dentro de 35 graus da vertical. A segunda regra aciona um sistema de recuperação failsafe usando o contato soldado GP6 independentemente de o segundo estágio ter sido acionado.
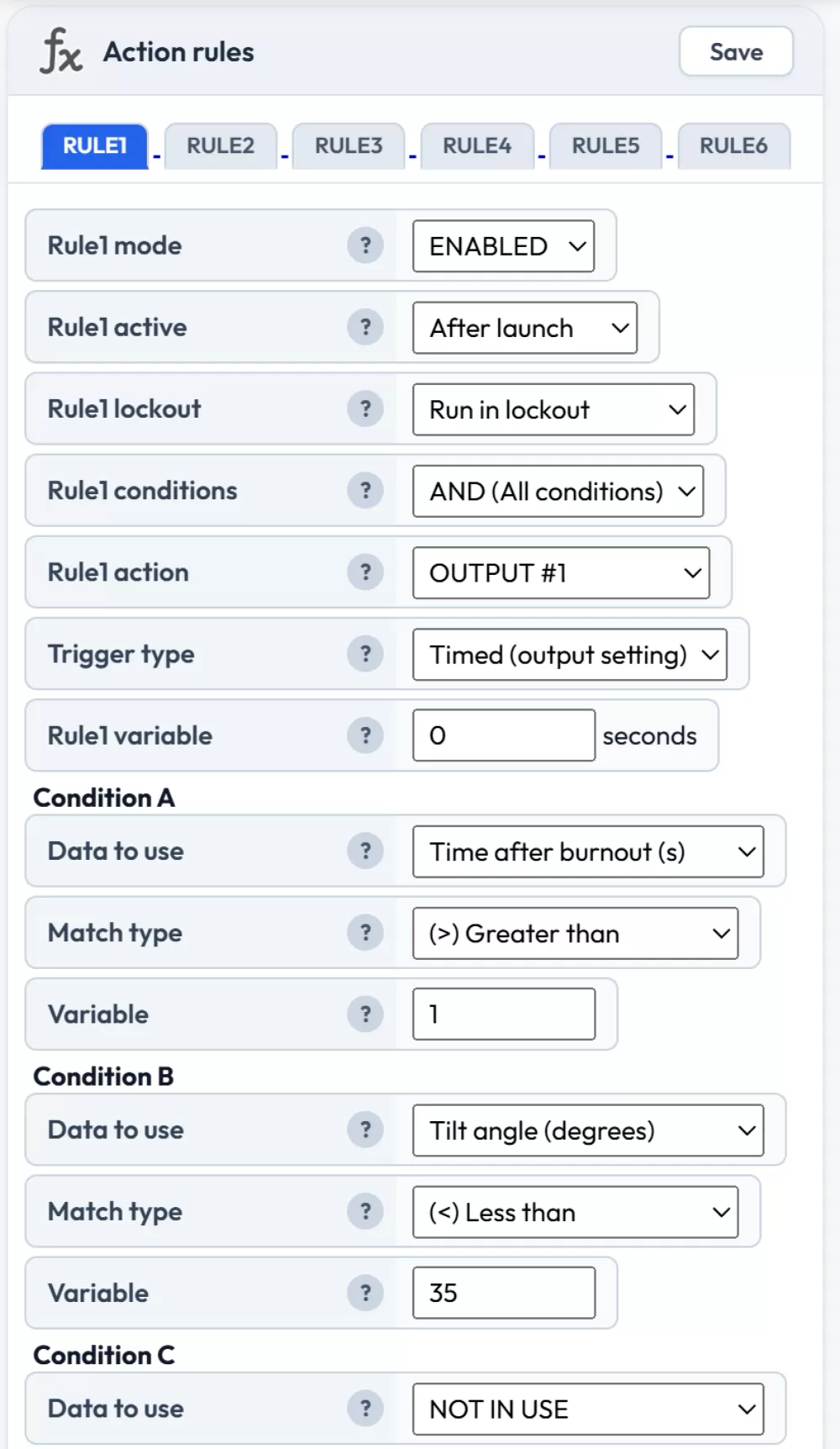
Regra 1: iniciação aérea protegida — aciona a saída 1 segundo após queima se inclinação estiver abaixo de 35°
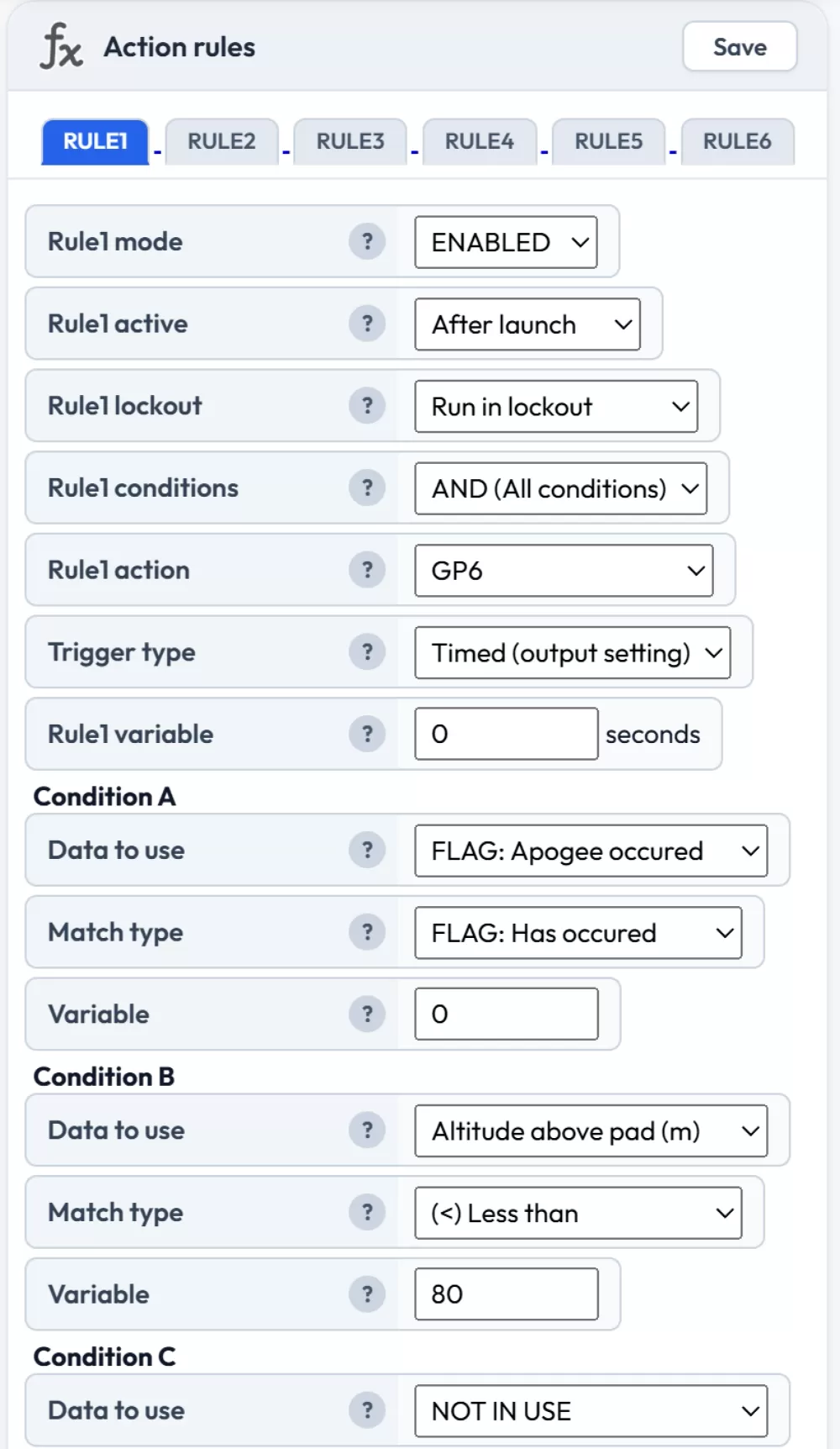
Regra 2: recuperação failsafe em 80 metros via GP6
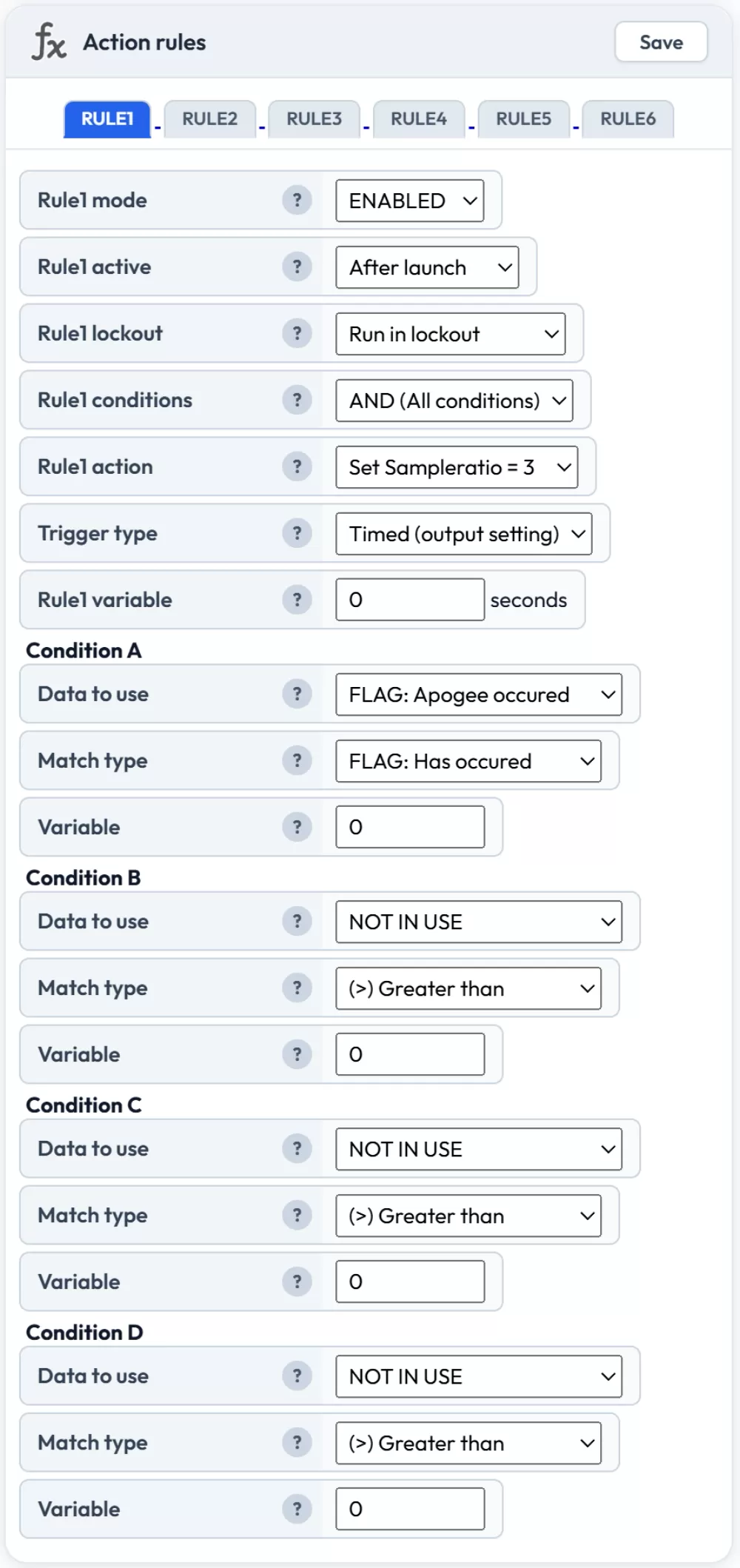
Exemplo: Aumentar taxa de amostragem 20 segundos após apogeu
Este exemplo reduz a taxa de logging após a fase de voo ativo para estender o tempo total de gravação. A taxa de amostragem é definida como 2 (logging de todas as outras amostras) quando 20 segundos desde apogeu passaram.
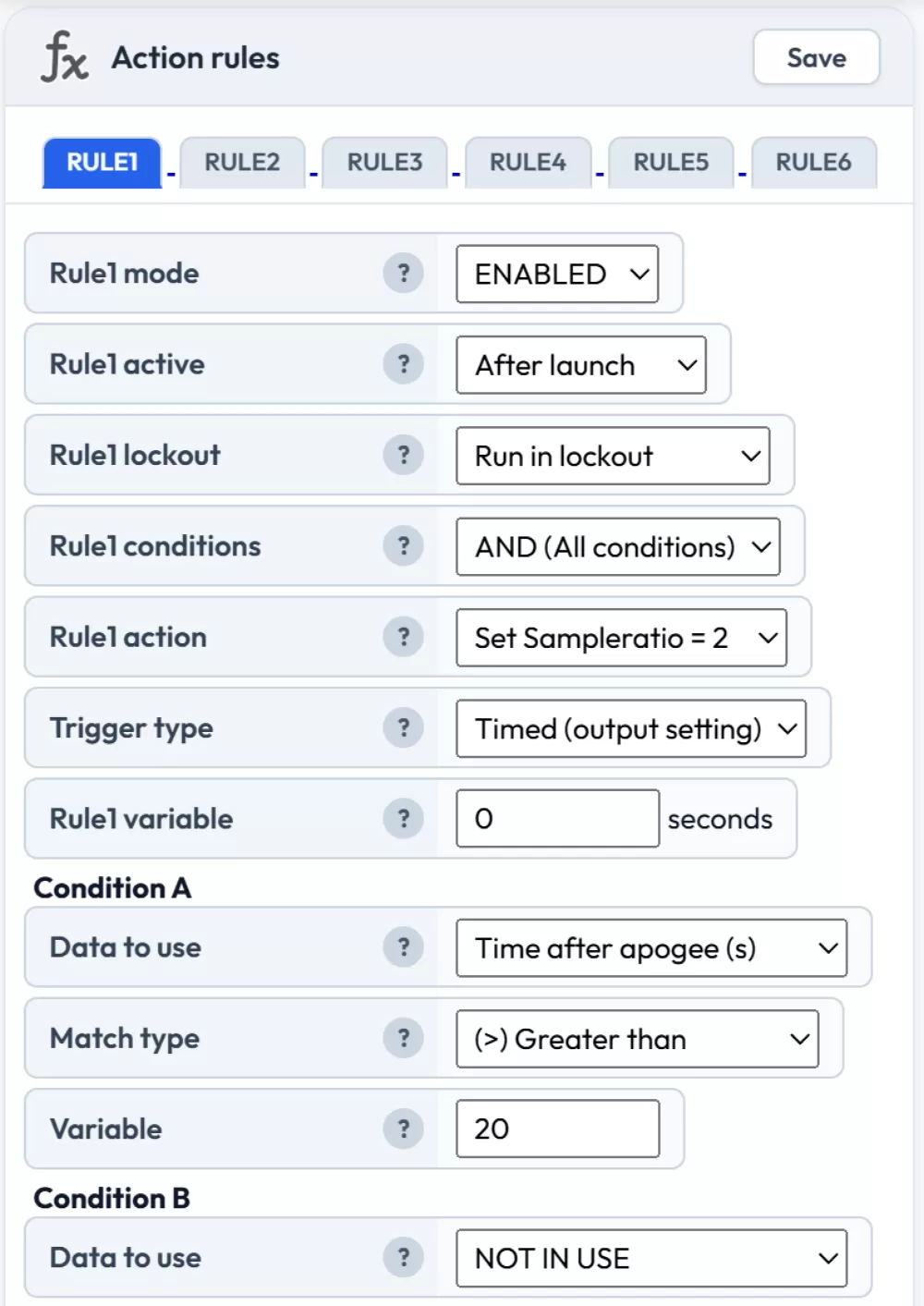
Uma taxa de amostragem de 2 significa que registramos todas as outras amostras no registro de voo
Exemplo: Bloquear regras até 10 segundos após lançamento
Este exemplo impede que todas as outras regras funcionem até 10 segundos após o lançamento ser detectado. Útil como medida de segurança para evitar acionadores de implantação prematura durante a fase de impulso.
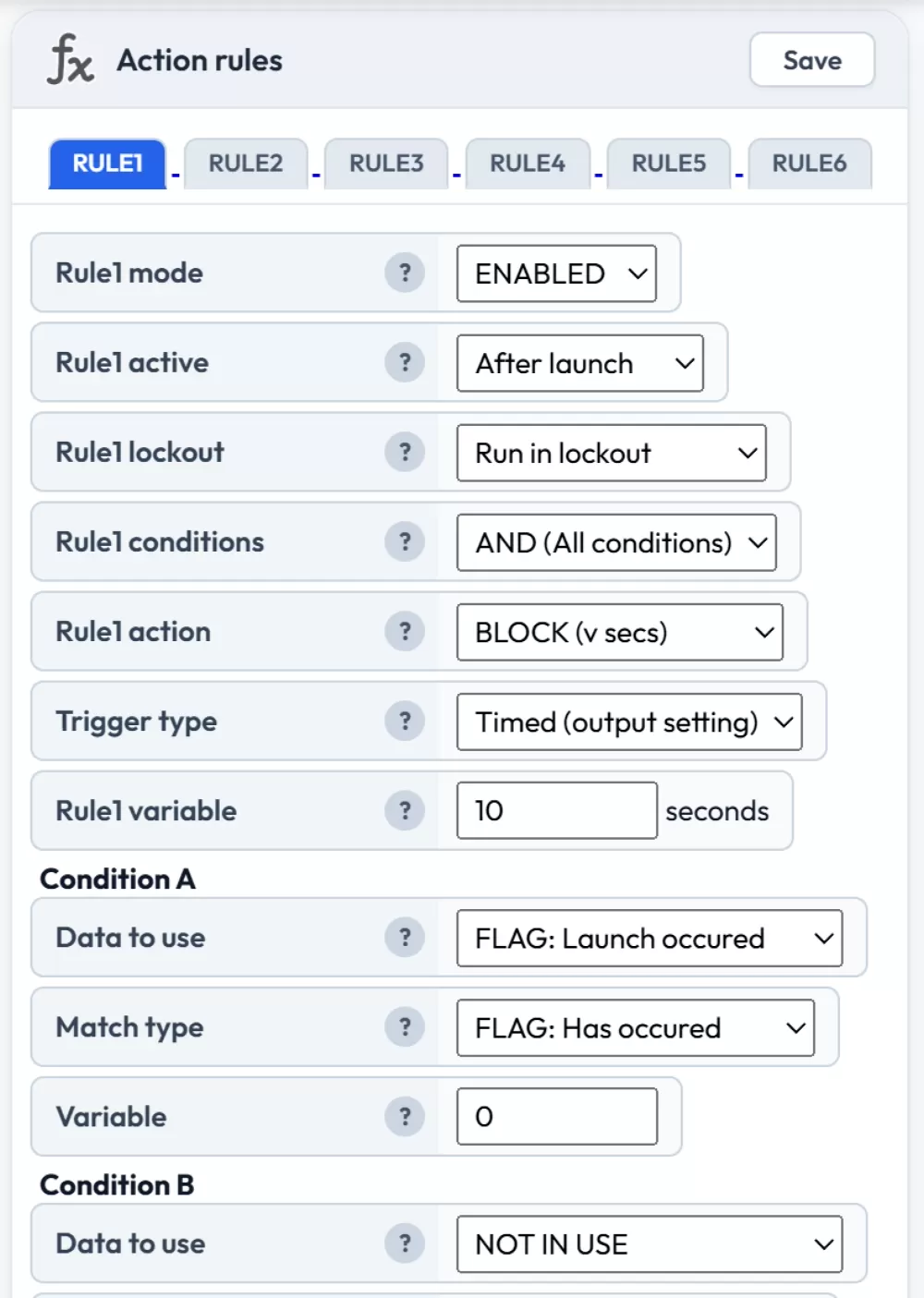
Usa BLOQUEAR (v segs) com a variável de regra definida como 10
Exemplo: Usar um servo I2C para implantar um sistema de recuperação
Este exemplo aciona um servo para implantar um sistema de recuperação. Aguarda até pelo menos 4 segundos após o lançamento ser detectado e até a velocidade cair abaixo de 20 metros por segundo.
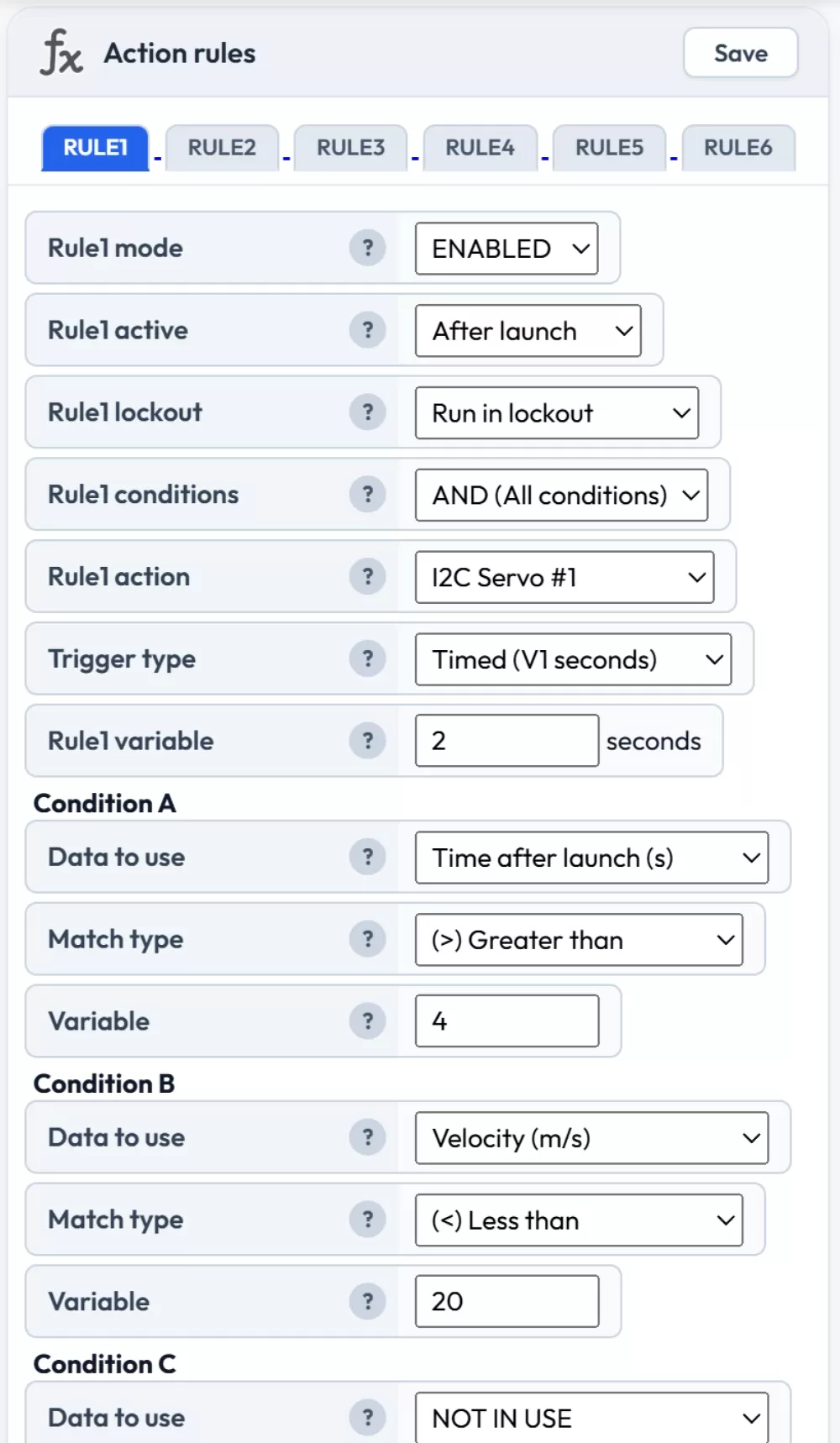
Configure os servos nas configurações de expansão de Servo I2C
Exemplo: Travar ATIVADO / Travar DESATIVADO para saída contínua
O tipo de acionador de travamento é útil quando você precisa que uma saída permaneça ativada por uma duração imprevisível. Por exemplo, você pode deseja ativar um zumbidor após o pouso e mantê-lo ativado até a bateria cair abaixo de um limite.
Regra 1: Defina a ação como SAÍDA #1, tipo de acionador como "Travar ATIVADO", com uma condição de "SINALIZADOR: Pouso ocorreu" — "SINALIZADOR: Ocorreu".
Regra 2: Defina a ação como SAÍDA #1, tipo de acionador como "Travar DESATIVADO", com uma condição de "Bateria (%)" menor que 10.
A saída será ativada quando o pouso for detectado e permanecerá ativada até a bateria cair abaixo de 10%.
Exemplo: Iniciação aérea multi-estágio com detecção de estágio
Para foguetes multi-estágio, você pode usar as condições específicas de estágio para controlar cada estágio independentemente. Por exemplo, para acionar um motor do segundo estágio 0,5 segundos após a queima do primeiro estágio com proteção de inclinação:
Condição A: "SINALIZADOR: Queima do motor ocorreu" — "SINALIZADOR: Ocorreu"
Condição B: "Tempo após queima do motor (s)" maior que 0.5
Condição C: "Ângulo de inclinação (graus)" menor que 30
Você pode então usar "Tempo após ignição 2" e "SINALIZADOR: Queima do motor 2 ocorreu" em regras subsequentes para gerenciar implantação de recuperação relativa ao perfil de voo do segundo estágio.
Exemplo: Duplo enfunelamento com failsafe usando (A+B) OR (C+D)
O modo de condição agrupada permite combinar um acionador primário e um backup failsafe em uma única regra. Por exemplo, para implantar um paraquedas principal na altitude normal ou após um tempo limite:
Defina o modo de condições como (A+B) OR (C+D), então:
Condição A: "SINALIZADOR: Apogeu ocorreu" — "SINALIZADOR: Ocorreu"
Condição B: "Altitude acima da plataforma (m)" menor que 150
Condição C: "Tempo após lançamento (s)" maior que 60
Condição D: "Velocidade (m/s)" menor que 5
Isto aciona a saída se (apogeu ocorreu E altitude está abaixo de 150 m) OU (mais de 60 segundos passaram desde o lançamento E o foguete está se movendo lentamente). O segundo par atua como failsafe caso a detecção de apogeu falhe. Requer firmware 2.3 ou posterior.