El Mercury te permite configurar seis reglas personalizadas, cada una con hasta 4 condiciones. Estas pueden controlar salidas, servos, frenos de aire y cambiar variables de configuración según sea necesario.
También hay una opción de configuración simple de control de salida. Puedes usar uno u otro sistema, o ambos, ya que funcionan independientemente entre sí.
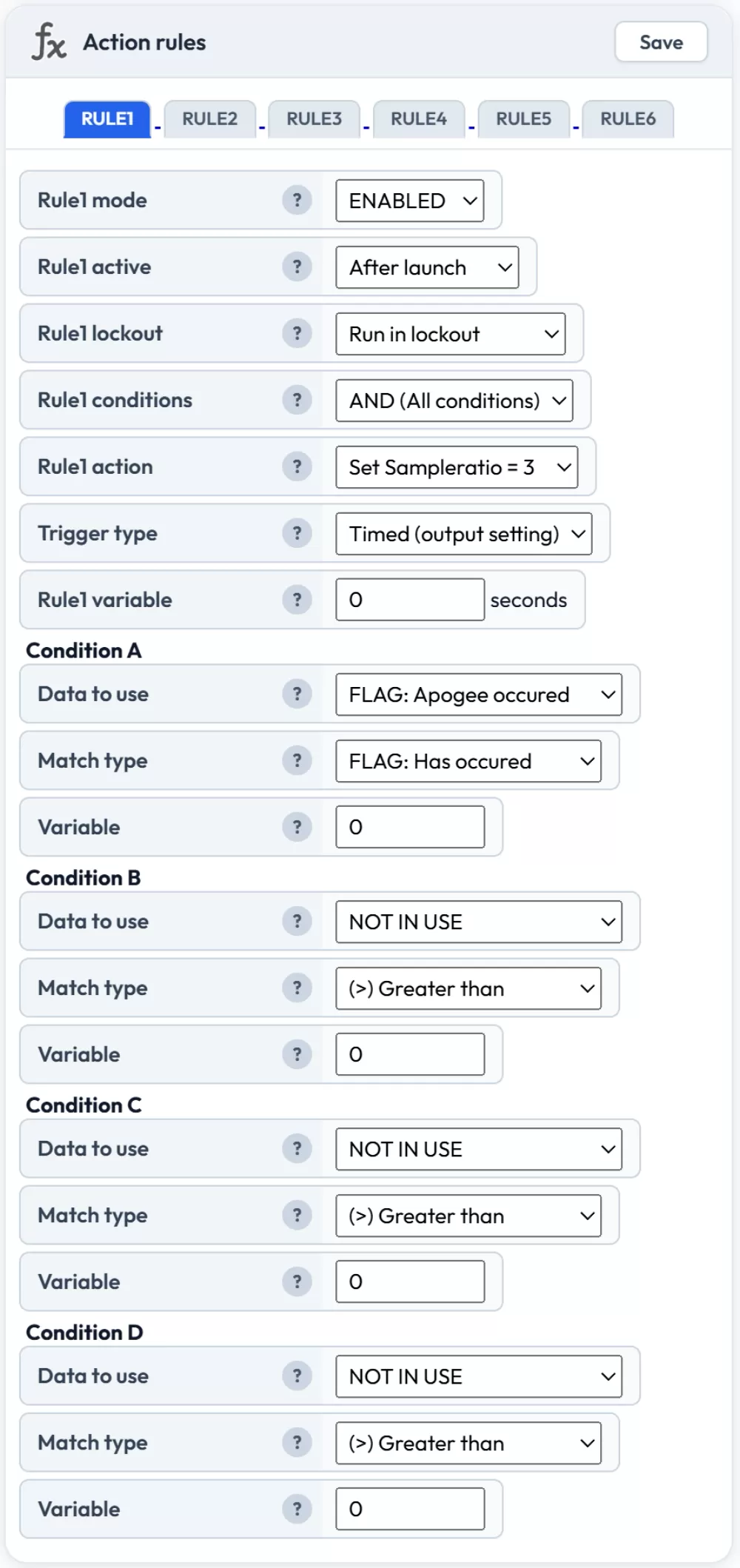
La caja de configuración de reglas
Al activar salidas o servos, estos deben configurarse primero mediante los ajustes de servo o los ajustes de Salida #1 en la página de configuración. Las reglas pueden entonces activar estas salidas tal como estén configuradas. Es importante notar que el tiempo de encendido de la salida principal se establece en los ajustes de Salida #1 incluso si no estás usando el activador de salida simple (puedes dejarlo deshabilitado pero solo configura la opción de tiempo de ENCENDIDO).
Al configurar una regla necesitas cambiar el modo de DESHABILITADO a HABILITADO y configurar todos los ajustes según necesites. Puedes establecer hasta 4 condiciones para cada regla y decidir si todas las condiciones deben cumplirse o si una sola condición es suficiente para activar la regla.
Ajustes de regla
Modo
Habilita o deshabilita la regla. Para usar una regla, cambia esto a habilitado.
Activo
Controla cuándo puede ejecutarse la regla. Elige si la regla está siempre activa (incluso mientras esperas en la plataforma antes del lanzamiento) o solo activa después de que se detecte el lanzamiento. Para la mayoría de reglas de despliegue querrás "solo después del lanzamiento".
Bloqueo
Si el altímetro detecta un aumento rápido de presión (como por una carga de eyección o una transición supersónica), entra en modo de bloqueo. Durante el bloqueo la altitud se considera no confiable y el altímetro pospone tomar decisiones que podría equivocarse. Esto puede configurarse en los ajustes de vuelo.
Usa este ajuste para decidir si tu regla debe ejecutarse durante el bloqueo (útil para funciones no afectadas por presión, como activadores basados en tiempo) o si solo debe ejecutarse fuera de bloqueos.
Condiciones (AND / OR / Agrupadas)
Controla cómo se evalúan múltiples condiciones:
AND (Todas las condiciones) — la regla se activará solo si cada condición (A, B, C, D) se cumple simultáneamente durante el mismo ciclo.
OR (Cualquier condición) — la regla se activará si se cumple cualquier condición.
(A+B) OR (C+D) — las condiciones A y B deben ser ambas verdaderas, O las condiciones C y D deben ser ambas verdaderas. Esto te da dos pares de condiciones independientes en una sola regla. Por ejemplo, podrías activar una salida si (el apogeo ha ocurrido Y la altitud está por debajo de 100 m) O (el tiempo después del lanzamiento excede 60 segundos Y la velocidad está por debajo de 5 m/s) — cubriendo tanto un despliegue dual normal como una recuperación de seguridad temporal en una regla. Requiere firmware 2.3 o posterior.
Acción
Esto le dice a la regla qué hacer cuando se cumplen sus condiciones. Las acciones disponibles son:
- SALIDA #1 — dispara la salida de alta corriente integrada
- GP6 — activa la salida o servo de la almohadilla de soldadura GP6
- GP7 — activa la salida o servo de la almohadilla de soldadura GP7
- BLOQUEAR (perm) — bloquea permanentemente todas las demás reglas de ejecutarse durante el resto del vuelo
- BLOQUEAR (v seg) — bloquea todas las demás reglas durante el número de segundos especificado en el campo de variable
- Finalizar grabación — detiene la grabación de vuelo inmediatamente
- Establecer relación de muestreo = 1, 2, 3, 5, 10 — cambia la velocidad de registro durante el vuelo para extender el tiempo de grabación
- Servo I2C #1 al #6 — activa uno de los 6 canales en la placa de expansión de servo PCA9685
- Freno de aire APAGADO — deshabilita el sistema de freno de aire
- Freno de aire ENCENDIDO — habilita el sistema de freno de aire
- ROC2 SALIDA1 — dispara el canal 1 en la placa de expansión de salida de alta corriente ROC2
- ROC2 SALIDA2 — dispara el canal 2 en la placa de expansión de salida de alta corriente ROC2
Tipo de activador
Controla cómo se comporta la acción cuando se activa. Esta es una adición más nueva que te da mucha más flexibilidad:
- Cronometrado (ajuste de salida) — dispara durante la duración configurada en los ajustes de salida o servo. Este es el comportamiento clásico.
- Cronometrado (V1 segundos) — dispara durante el número de segundos especificado en el campo de variable de la regla abajo. Esto permite que cada regla tenga su propio tiempo de encendido independiente sin cambiar los ajustes de salida.
- Cierre ENCENDIDO — enciende la salida y la mantiene encendida hasta que una regla separada con Cierre APAGADO se dispare. Útil para cosas que necesitan permanecer activas durante una duración impredecible.
- Cierre APAGADO — apaga la salida inmediatamente. Usa esto en combinación con una regla de Cierre ENCENDIDO para crear pares de encendido/apagado controlados por diferentes condiciones.
Variable
Si tu regla requiere una variable, ingresala aquí. Para "BLOQUEAR (v seg)" este es el número de segundos a bloquear. Para "Cronometrado (V1 segundos)" este es el tiempo de encendido en segundos. Las salidas y servos que usan su propio tiempo de encendido configurado no necesitan este campo.
Condiciones
Cada regla tiene hasta 4 condiciones. Necesitas especificar al menos 1 condición para que una regla funcione. Cada condición tiene 3 opciones a establecer.
Datos a usar
Esto especifica qué datos de vuelo comprueba la condición. Las opciones disponibles son:
Datos de sensor y vuelo:
- Altitud sobre la plataforma (m) — altitud actual relativa a la plataforma de lanzamiento
- Magnitud de aceleración (G) — magnitud total de aceleración en todos los ejes
- Aceleración X / Y / Z (G) — aceleración en ejes individuales
- Eje de giróscopo más alto (dps) — la velocidad de rotación más alta en todos los ejes del giróscopo
- Giróscopo X / Y / Z (dps) — velocidad de rotación en ejes individuales
- Ángulo de inclinación (grados) — ángulo desde la vertical
- Ángulo de balanceo / cabeceo / guiñada (grados) — ángulos de orientación individuales
- Velocidad (m/s) — velocidad actual de ascenso o descenso
- Batería (%) — nivel de carga actual de la batería
- Temperatura de la placa (°C) — temperatura del sensor de presión
- Temperatura MT1 (°C) — temperatura del sensor externo MT1 (si está conectado)
Basado en tiempo:
- Tiempo después del lanzamiento (s) — segundos desde que se detectó el lanzamiento
- Tiempo después del apogeo (s) — segundos desde el apogeo
- Tiempo después del aterrizaje (s) — segundos desde que se detectó el aterrizaje
- Tiempo después del agotamiento (s) — segundos desde el agotamiento del motor
Predicción y frenos de aire:
- Apogeo predicho (m) — la altitud de apogeo estimada actual durante la fase de planeo
- Freno de aire en porcentaje (%) — qué tan desplegados están actualmente los frenos de aire (0–100%)
Multi-etapa (firmware 2.3+):
- Tiempo después del agotamiento 2 / 3 / 4 (s) — segundos desde el agotamiento de la 2.ª, 3.ª o 4.ª etapa
- Tiempo después del encendido 2 / 3 / 4 (s) — segundos desde el encendido de la 2.ª, 3.ª o 4.ª etapa
- Recuento de etapas — el número de etapas detectadas hasta ahora
Marcas de evento:
- MARCA: Ocurrió el lanzamiento
- MARCA: Ocurrió el apogeo
- MARCA: Ocurrió el agotamiento
- MARCA: Ocurrió el aterrizaje
- MARCA: Ocurrió el agotamiento 2 / 3 / 4 (multi-etapa)
- MARCA: Ocurrió el encendido 2 / 3 / 4 (multi-etapa)
Tipo de coincidencia
Esto le dice a la regla cómo comparar los datos elegidos contra tu valor variable:
- (>) Mayor que
- (>=) Mayor o igual
- (=) Igual
- (!=) No igual
- (<) Menor que
- (<=) Menor o igual
- MARCA: Ha ocurrido — usar con opciones de datos de MARCA
- MARCA: No ha ocurrido — usar con opciones de datos de MARCA
Variable de condición
El valor de umbral a comparar. Por ejemplo, si estás comparando cuando la altitud cae por debajo de 80 metros, ingresa 80 aquí. No es necesario para condiciones de MARCA.
Ejemplo: Activar la salida después del apogeo y por debajo de 100 metros
Este ejemplo podría usarse para un despliegue dual donde tu motor ha eyectado el primer paracaídas pequeño y quieres usar la salida para activar un paracaídas secundario cuando el cohete cae por debajo de 100 metros.
Establece la primera condición en "MARCA: Ocurrió el apogeo" con tipo de coincidencia "MARCA: Ha ocurrido". Establece la segunda condición en "Altitud sobre la plataforma (m)" menor que 100.
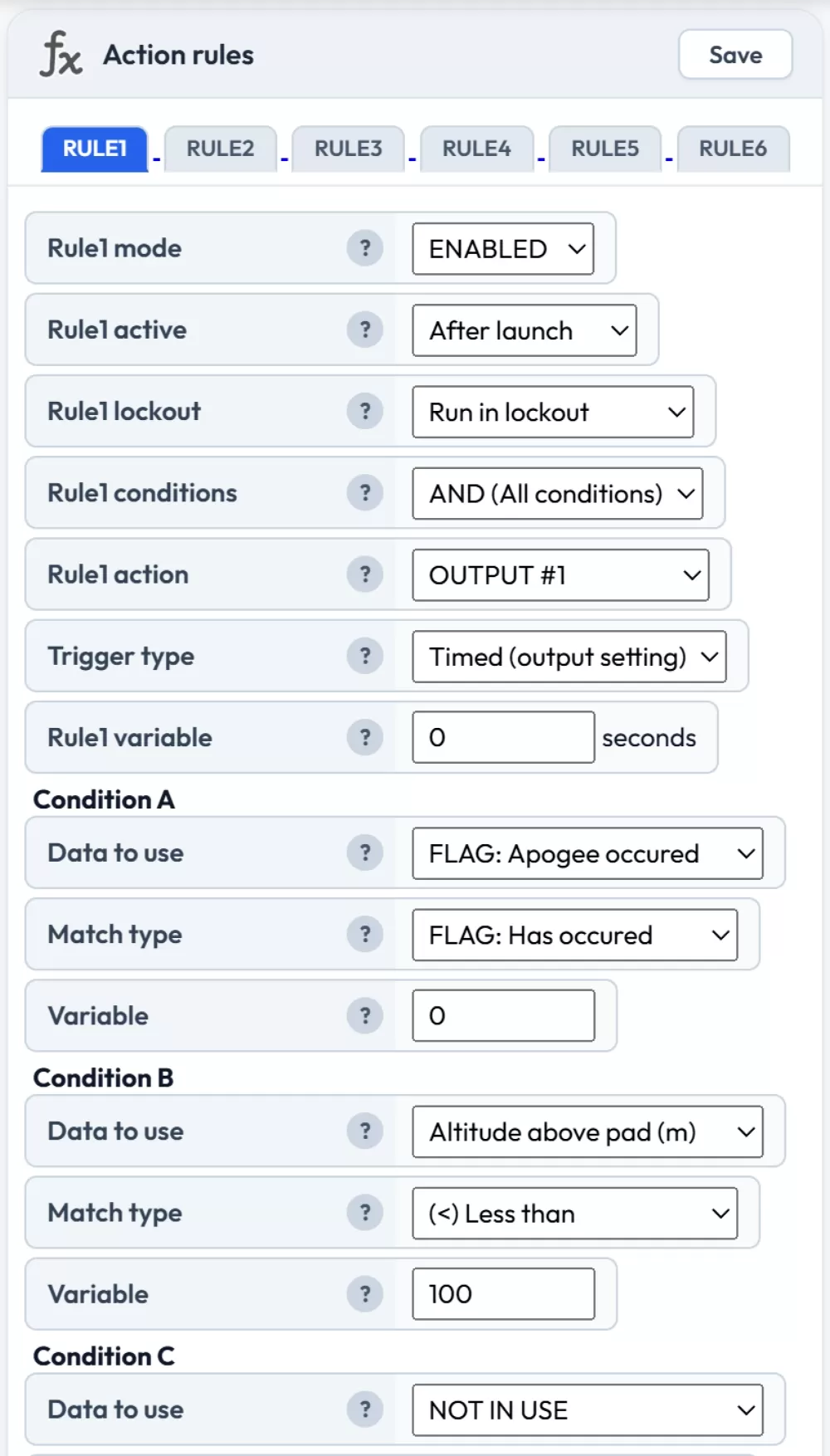
Despliegue dual a 100 metros después del apogeo
Ejemplo: Encendido por aire de la segunda etapa con protección de inclinación
Este ejemplo usa dos reglas para encender el motor de la segunda etapa usando la SALIDA, 1 segundo después del agotamiento, siempre que el cohete esté dentro de 35 grados de la vertical. La segunda regla activa un sistema de recuperación de seguridad usando la almohadilla de soldadura GP6 independientemente de si la segunda etapa fue encendida.
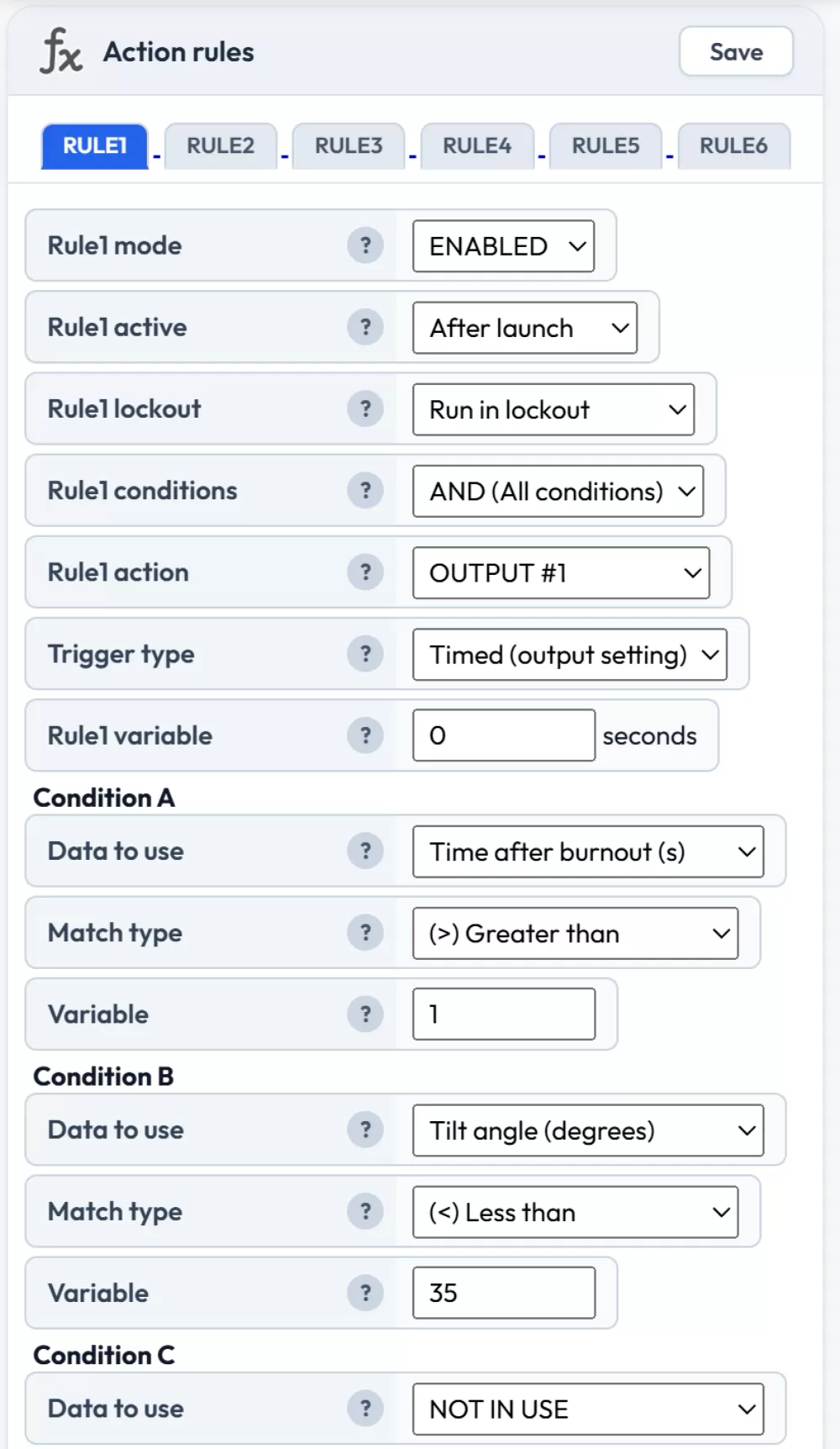
Regla 1: encendido por aire protegido — dispara salida 1 segundo después del agotamiento si la inclinación está por debajo de 35°
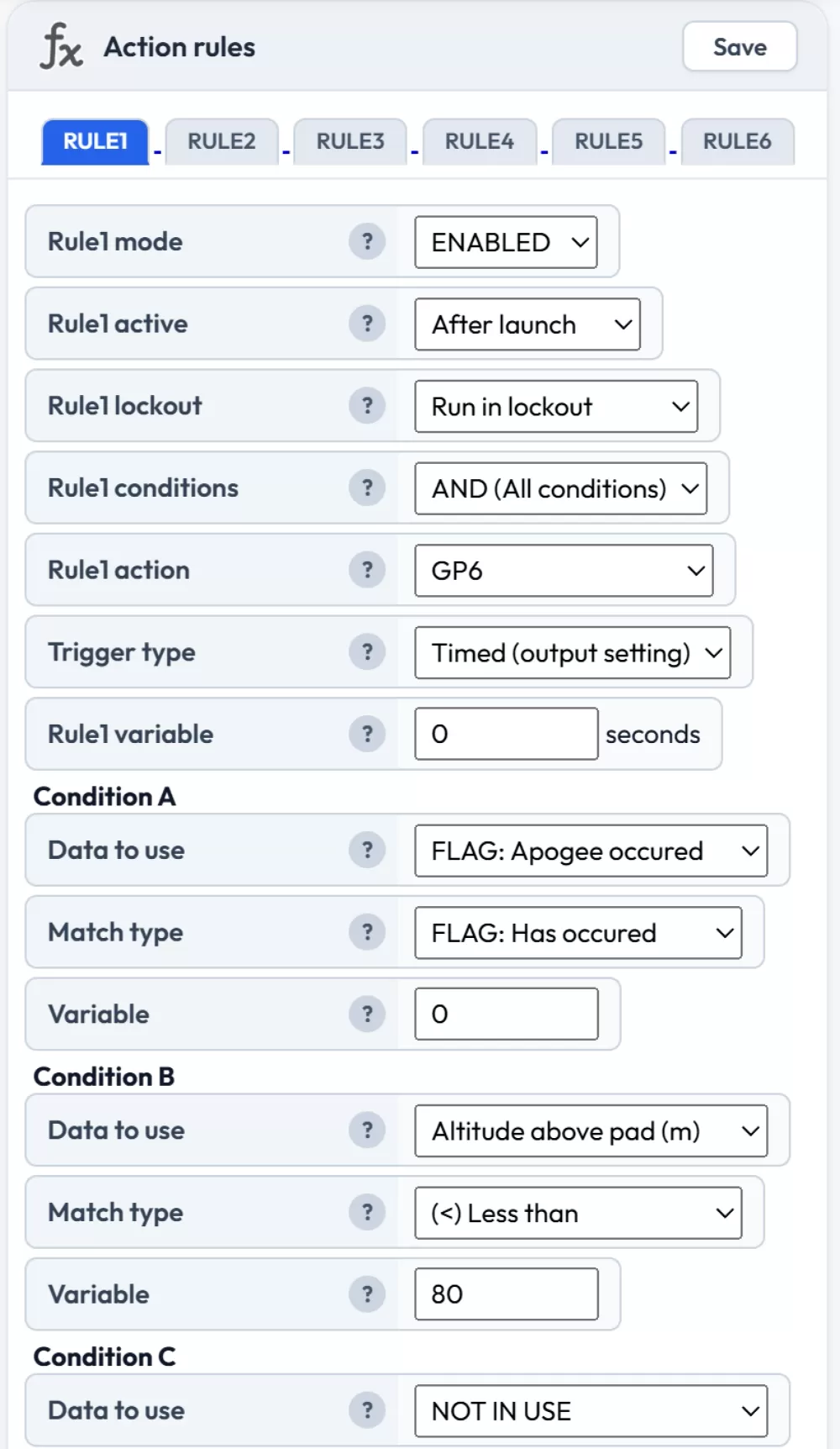
Regla 2: recuperación de seguridad a 80 metros vía GP6
Ejemplo: Aumentar la relación de muestreo 20 segundos después del apogeo
Este ejemplo reduce la velocidad de registro después de la fase de vuelo activo para extender el tiempo total de grabación. La relación de muestreo se establece en 2 (registro de cada otra muestra) cuando han pasado 20 segundos desde el apogeo.
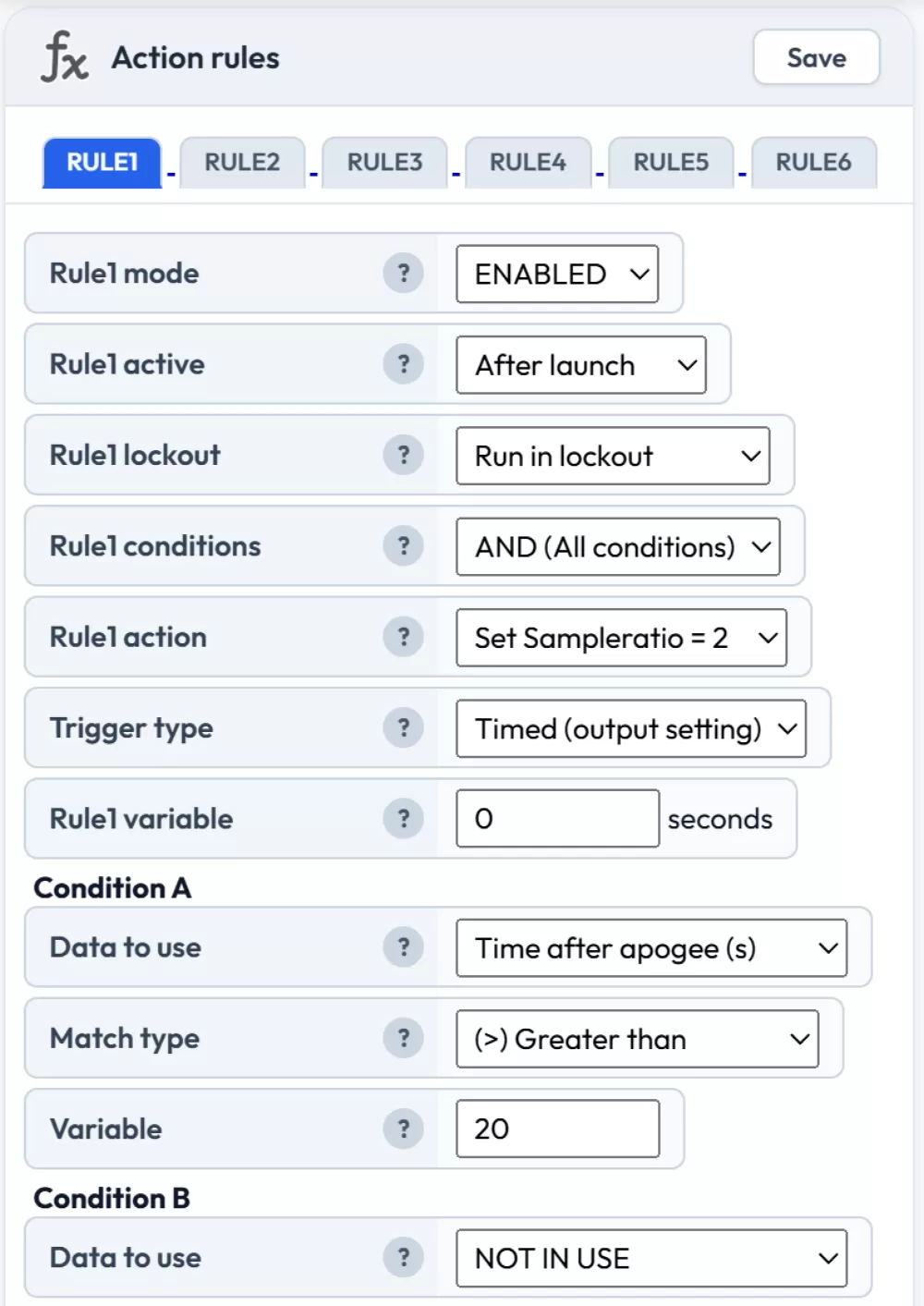
Una relación de muestreo de 2 significa que registramos cada otra muestra en el registro de vuelo
Ejemplo: Bloquear reglas hasta 10 segundos después del lanzamiento
Este ejemplo impide que todas las demás reglas se ejecuten hasta 10 segundos después de que se detecte el lanzamiento. Útil como medida de seguridad para evitar activadores de despliegue prematuro durante la fase de impulso.
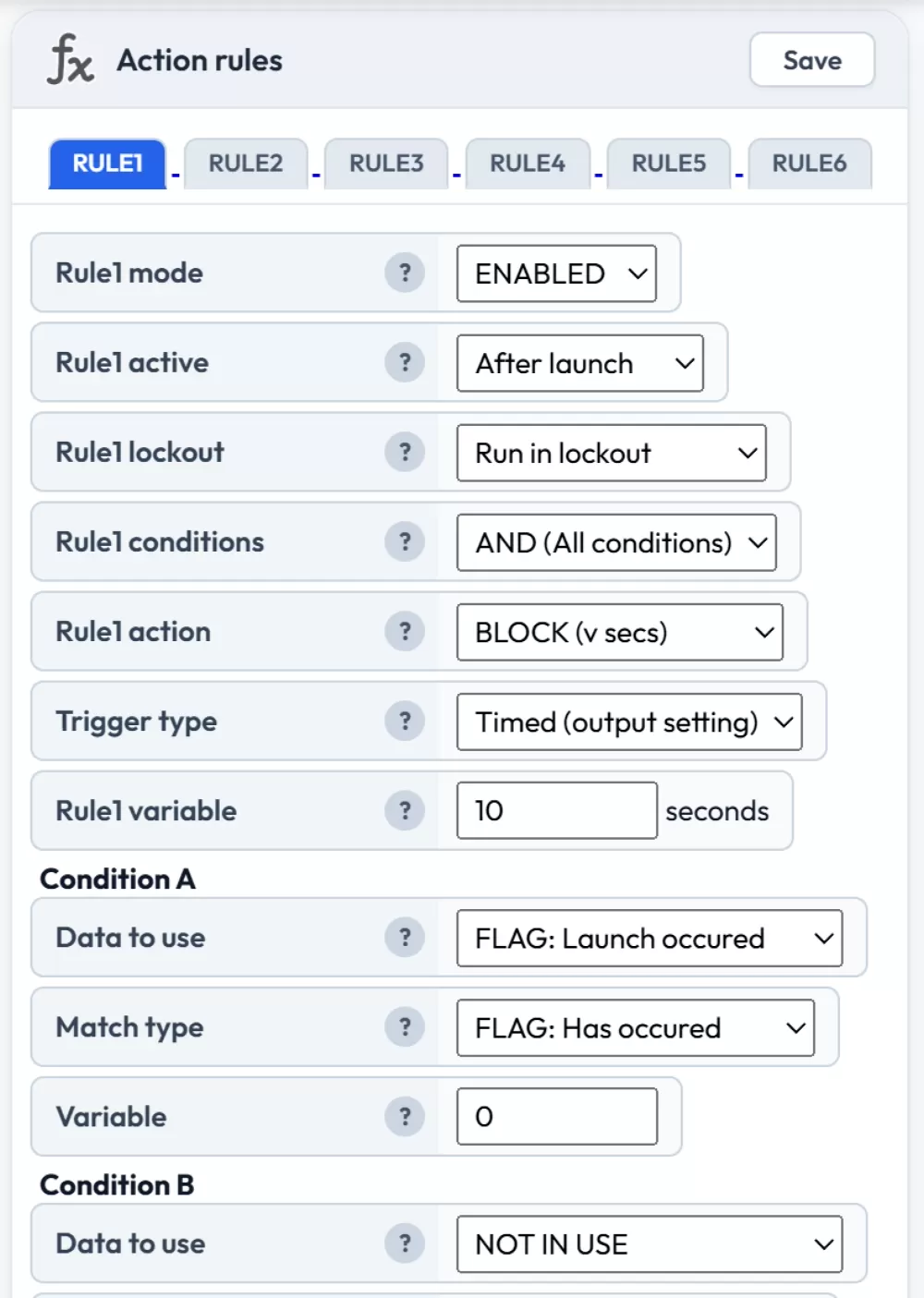
Usa BLOQUEAR (v seg) con la variable de regla establecida en 10
Ejemplo: Usar un servo I2C para desplegar un sistema de recuperación
Este ejemplo activa un servo para desplegar un sistema de recuperación. Espera hasta al menos 4 segundos después de que se detectó el lanzamiento y hasta que la velocidad haya caído por debajo de 20 metros por segundo.
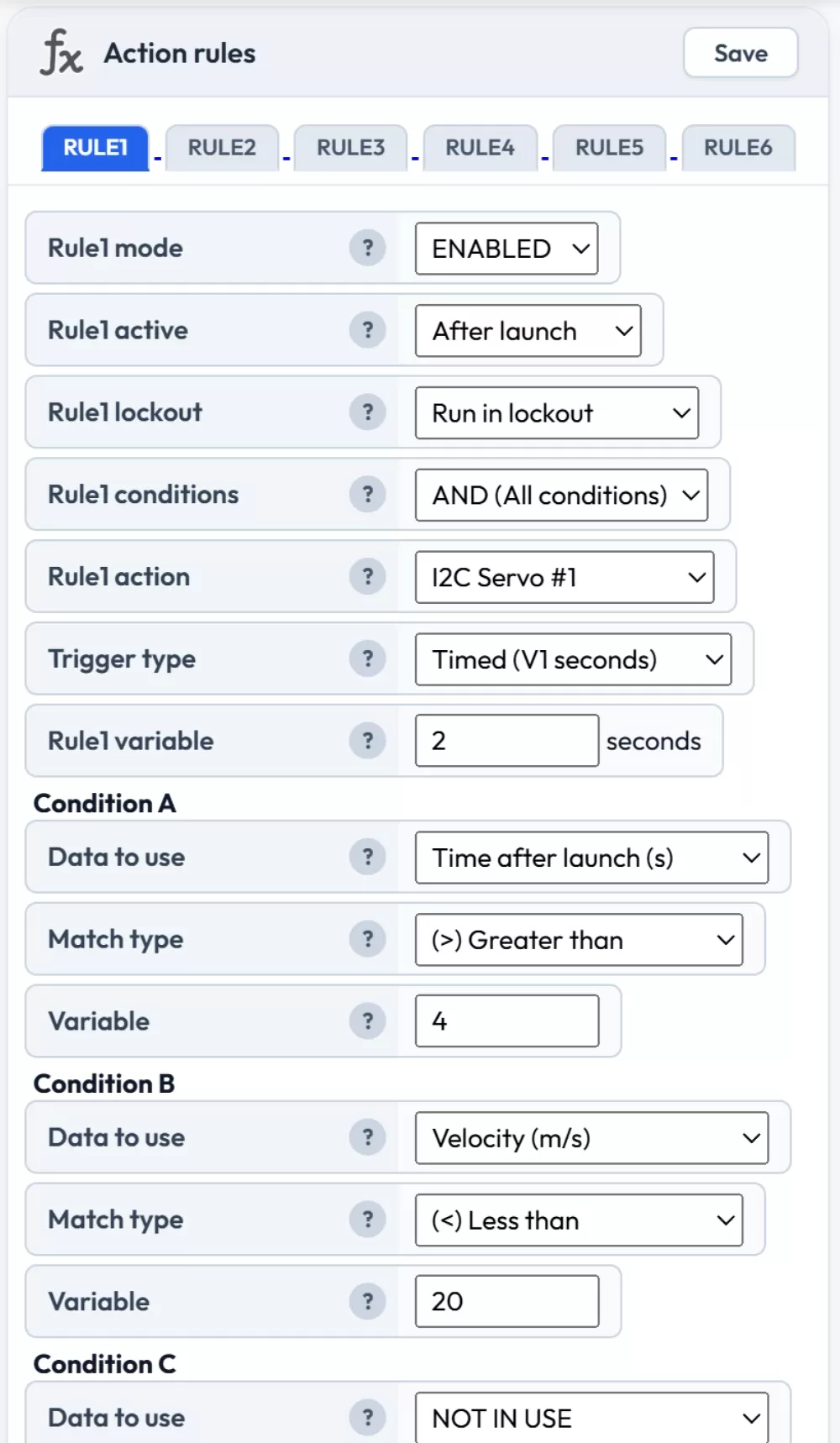
Configura los servos en los ajustes de expansión de servo I2C
Ejemplo: Cierre ENCENDIDO / Cierre APAGADO para salida continua
El tipo de activador de cierre es útil cuando necesitas que una salida permanezca encendida durante una duración impredecible. Por ejemplo, es posible que desees activar un zumbador después del aterrizaje y mantenerlo encendido hasta que la batería caiga por debajo de un umbral.
Regla 1: Establece la acción en SALIDA #1, tipo de activador en "Cierre ENCENDIDO", con una condición de "MARCA: Ocurrió el aterrizaje" — "MARCA: Ha ocurrido".
Regla 2: Establece la acción en SALIDA #1, tipo de activador en "Cierre APAGADO", con una condición de "Batería (%)" menor que 10.
La salida se encenderá cuando se detecte el aterrizaje y permanecerá encendida hasta que la batería caiga por debajo del 10%.
Ejemplo: Encendido por aire multi-etapa con detección de etapa
Para cohetes multi-etapa, puedes usar las condiciones específicas de etapa para controlar cada etapa independientemente. Por ejemplo, para encender un motor de segunda etapa 0,5 segundos después del agotamiento de la primera etapa con protección de inclinación:
Condición A: "MARCA: Ocurrió el agotamiento" — "MARCA: Ha ocurrido"
Condición B: "Tiempo después del agotamiento (s)" mayor que 0,5
Condición C: "Ángulo de inclinación (grados)" menor que 30
Luego puedes usar "Tiempo después del encendido 2" y "MARCA: Ocurrió el agotamiento 2" en reglas posteriores para gestionar el despliegue de recuperación relativo al perfil de vuelo de la segunda etapa.
Ejemplo: Despliegue dual con seguridad usando (A+B) OR (C+D)
El modo de condición agrupada te permite combinar un activador primario y una copia de seguridad de respaldo en una sola regla. Por ejemplo, para desplegar un paracaídas principal ya sea a la altitud normal o después de un tiempo de espera:
Establece el modo de condiciones en (A+B) OR (C+D), luego:
Condición A: "MARCA: Ocurrió el apogeo" — "MARCA: Ha ocurrido"
Condición B: "Altitud sobre la plataforma (m)" menor que 150
Condición C: "Tiempo después del lanzamiento (s)" mayor que 60
Condición D: "Velocidad (m/s)" menor que 5
Esto dispara la salida si (el apogeo ha ocurrido Y la altitud está por debajo de 150 m) O (han pasado más de 60 segundos desde el lanzamiento Y el cohete se mueve apenas). El segundo par actúa como seguridad en caso de que falle la detección del apogeo. Requiere firmware 2.3 o posterior.