Le Mercury vous permet de configurer six règles personnalisées, chacune avec jusqu'à 4 conditions. Celles-ci peuvent contrôler les sorties, les servos, les freins aérodynamiques et modifier les variables de configuration selon vos besoins.
Il existe également une option de paramètre de contrôle de sortie simple. Vous pouvez utiliser l'un ou l'autre système ou les deux, car ils fonctionnent indépendamment l'un de l'autre.
La boîte de configuration des règles
Lors du déclenchement des sorties ou des servos, ceux-ci doivent d'abord être configurés via les paramètres de servo ou les paramètres Output #1 sur la page des paramètres. Les règles peuvent ensuite déclencher ces sorties telles qu'elles sont configurées. Il est important de noter que le temps d'activation principal de la sortie est défini dans les paramètres Output #1, même si vous n'utilisez pas le déclenchement de sortie simple (vous pouvez le laisser désactivé mais simplement définir l'option ON time).
Lors de la configuration d'une règle, vous devez changer le mode de DISABLED à ENABLED et configurer tous les paramètres selon vos besoins. Vous pouvez définir jusqu'à 4 conditions pour chaque règle et décider si toutes les conditions doivent être remplies, ou si une seule condition est suffisante pour déclencher la règle.
Paramètres des règles
Mode
Active ou désactive la règle. Pour utiliser une règle, changez ceci à activé.
Actif
Contrôle quand la règle peut s'exécuter. Choisissez si la règle est toujours active (même en attente sur le pas de tir avant le lancement) ou uniquement active après la détection du lancement. Pour la plupart des règles de déploiement, vous voudrez « après le lancement uniquement ».
Verrouillage
Si l'altimètre détecte une augmentation rapide de la pression (comme d'une charge d'éjection ou d'une transition supersonique), il entre en mode verrouillage. Pendant le verrouillage, l'altitude est considérée comme peu fiable et l'altimètre reporte les décisions qui pourraient être incorrectes. Ceci peut être configuré dans les paramètres de vol.
Utilisez ce paramètre pour décider si votre règle doit s'exécuter pendant le verrouillage (utile pour les fonctions non affectées par la pression, telles que les déclenchements basés sur le temps) ou si elle ne doit s'exécuter qu'en dehors des verrouillages.
Conditions (AND / OR / Groupées)
Contrôle comment plusieurs conditions sont évaluées :
AND (Toutes les conditions) — la règle se déclenchera uniquement si chaque condition (A, B, C, D) est remplie simultanément au cours du même cycle.
OR (N'importe quelle condition) — la règle se déclenchera si n'importe quelle condition est remplie.
(A+B) OR (C+D) — les conditions A et B doivent toutes deux être vraies, OU les conditions C et D doivent toutes deux être vraies. Cela vous donne deux paires de conditions indépendantes dans une seule règle. Par exemple, vous pourriez déclencher une sortie si (l'apogée s'est produit ET l'altitude est inférieure à 100 m) OU (le temps après le lancement dépasse 60 secondes ET la vitesse est inférieure à 5 m/s) — couvrant à la fois un déploiement double normal et un délai d'expiration de basculement dans une seule règle. Nécessite le firmware 2.3 ou ultérieur.
Action
Cela indique à la règle ce qu'il faut faire quand ses conditions sont remplies. Les actions disponibles sont :
- OUTPUT #1 — déclenche la sortie haute intensité embarquée
- GP6 — active la sortie du point de soudure GP6 ou le servo
- GP7 — active la sortie du point de soudure GP7 ou le servo
- BLOCK (perm) — bloque de façon permanente toutes les autres règles de s'exécuter pour le reste du vol
- BLOCK (v secs) — bloque toutes les autres règles pendant le nombre de secondes spécifié dans le champ variable
- End recording — arrête immédiatement l'enregistrement du vol
- Set Sample ratio = 1, 2, 3, 5, 10 — change le taux d'enregistrement en vol pour prolonger le temps d'enregistrement
- I2C Servo #1 à #6 — déclenche l'un des 6 canaux de la carte d'expansion servo PCA9685
- Airbrake OFF — désactive le système de freins aérodynamiques
- Airbrake ON — active le système de freins aérodynamiques
- ROC2 OUT1 — déclenche le canal 1 sur la carte d'expansion de sortie haute intensité ROC2
- ROC2 OUT2 — déclenche le canal 2 sur la carte d'expansion de sortie haute intensité ROC2
Type de déclenchement
Contrôle le comportement de l'action quand elle est déclenchée. Ceci est un ajout plus récent qui vous donne beaucoup plus de flexibilité :
- Temporisé (paramètre de sortie) — déclenche pendant la durée configurée dans la boîte de paramètres de sortie ou de servo. C'est le comportement classique.
- Temporisé (V1 secondes) — déclenche pendant le nombre de secondes spécifié dans le champ variable de la règle ci-dessous. Cela permet à chaque règle d'avoir son propre temps d'activation indépendant sans modifier les paramètres de sortie.
- Latch ON — active la sortie et la maintient active jusqu'à ce qu'une règle séparée avec Latch OFF se déclenche. Utile pour les choses qui doivent rester actives pendant une durée imprévisible.
- Latch OFF — désactive immédiatement la sortie. Utilisez ceci en combinaison avec une règle Latch ON pour créer des paires marche/arrêt contrôlées par des conditions différentes.
Variable
Si votre règle nécessite une variable, entrez-la ici. Pour « BLOCK (v secs) », c'est le nombre de secondes à bloquer. Pour « Temporisé (V1 secondes) », c'est le temps d'activation en secondes. Les sorties et les servos qui utilisent leur propre temps d'activation configuré n'ont pas besoin de ce champ.
Conditions
Chaque règle a jusqu'à 4 conditions. Vous devez spécifier au moins 1 condition pour qu'une règle fonctionne. Chaque condition a 3 options à définir.
Données à utiliser
Ceci spécifie quelles données de vol la condition vérifie. Les options disponibles sont :
Données de capteur et de vol :
- Altitude au-dessus du pas (m) — altitude actuelle relative au pas de tir
- Magnitude de l'accélération (G) — magnitude totale de l'accélération sur tous les axes
- Acc X / Y / Z (G) — accélération sur les axes individuels
- Axe gyro le plus élevé (dps) — le taux de rotation le plus élevé sur tous les axes du gyroscope
- Gyro X / Y / Z (dps) — taux de rotation sur les axes individuels
- Angle d'inclinaison (degrés) — angle par rapport à la verticale
- Angle de roulis / tangage / lacet (degrés) — angles d'orientation individuels
- Vitesse (m/s) — vitesse actuelle d'ascension ou de descente
- Batterie (%) — niveau actuel de charge de la batterie
- Température du circuit (°C) — température du capteur de pression
- Température MT1 (°C) — température du capteur externe MT1 (si connecté)
Basé sur le temps :
- Temps après le lancement (s) — secondes depuis la détection du lancement
- Temps après apogée (s) — secondes depuis l'apogée
- Temps après l'atterrissage (s) — secondes depuis la détection de l'atterrissage
- Temps après la fin de combustion (s) — secondes depuis la fin de combustion du moteur
Prédiction et freins aérodynamiques :
- Apogée prédite (m) — l'altitude apogée estimée actuelle pendant la phase de vol parabolique
- Pourcentage de freins aérodynamiques déployés (%) — degré actuel de déploiement des freins aérodynamiques (0–100%)
Multi-étage (firmware 2.3+) :
- Temps après la fin de combustion 2 / 3 / 4 (s) — secondes après la fin de combustion du 2e, 3e ou 4e étage
- Temps après l'allumage 2 / 3 / 4 (s) — secondes après l'allumage du 2e, 3e ou 4e étage
- Nombre d'étages — le nombre d'étages détectés jusqu'à présent
Indicateurs d'événement :
- FLAG: Le lancement s'est produit
- FLAG: L'apogée s'est produit
- FLAG: La fin de combustion s'est produit
- FLAG: L'atterrissage s'est produit
- FLAG: La fin de combustion 2 / 3 / 4 s'est produit (multi-étage)
- FLAG: L'allumage 2 / 3 / 4 s'est produit (multi-étage)
Type de correspondance
Cela indique à la règle comment comparer les données choisies par rapport à votre valeur variable :
- (>) Supérieur à
- (>=) Supérieur ou égal
- (=) Égal
- (!=) Non égal
- (<) Inférieur à
- (<=) Inférieur ou égal
- FLAG: S'est produit — utiliser avec les options de données FLAG
- FLAG: Ne s'est pas produit — utiliser avec les options de données FLAG
Variable de condition
La valeur seuil à comparer. Par exemple, si vous correspondez quand l'altitude descend en dessous de 80 mètres, entrez 80 ici. Non nécessaire pour les conditions FLAG.
Exemple : Déclencher la sortie après l'apogée et en dessous de 100 mètres
Cet exemple pourrait être utilisé pour un déploiement double où votre moteur a éjecté le premier petit parachute et vous voulez utiliser la sortie pour déclencher un parachute secondaire quand la fusée descend en dessous de 100 mètres.
Définissez la première condition sur « FLAG: L'apogée s'est produit » avec le type de correspondance « FLAG: S'est produit ». Définissez la deuxième condition sur « Altitude au-dessus du pas (m) » inférieur à 100.
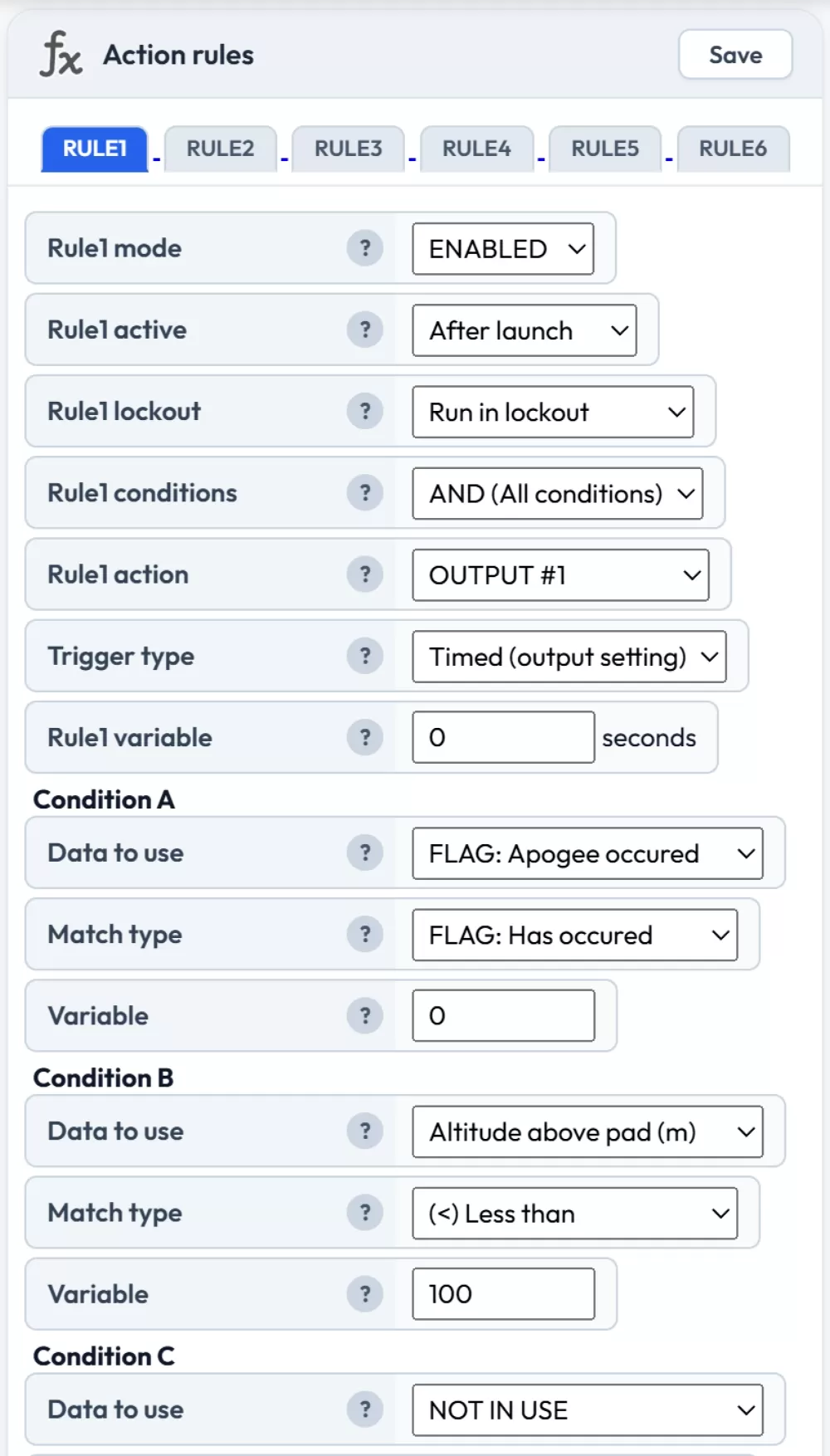
Déploiement double à 100 mètres après apogée
Exemple : Démarrage en vol de la deuxième étage avec protection contre l'inclinaison
Cet exemple utilise deux règles pour allumer le moteur de la deuxième étage en utilisant OUTPUT, 1 seconde après la fin de combustion, tant que la fusée est à moins de 35 degrés de la verticale. La deuxième règle déclenche un système de récupération de basculement en utilisant le point de soudure GP6 indépendamment du fait que la deuxième étape ait été tirée ou non.
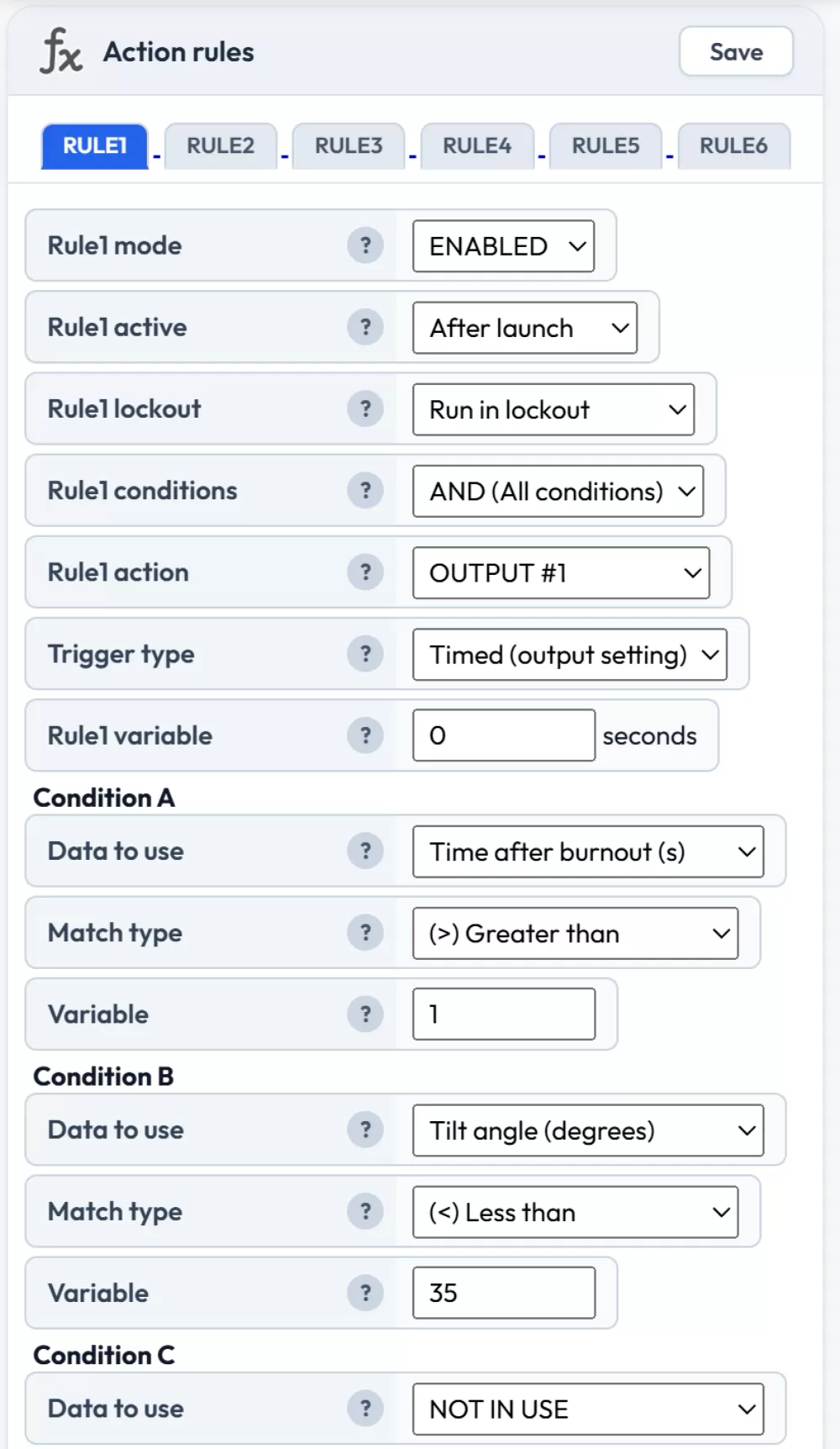
Règle 1 : démarrage en vol protégé — déclenche output 1 seconde après la fin de combustion si l'inclinaison est inférieure à 35°
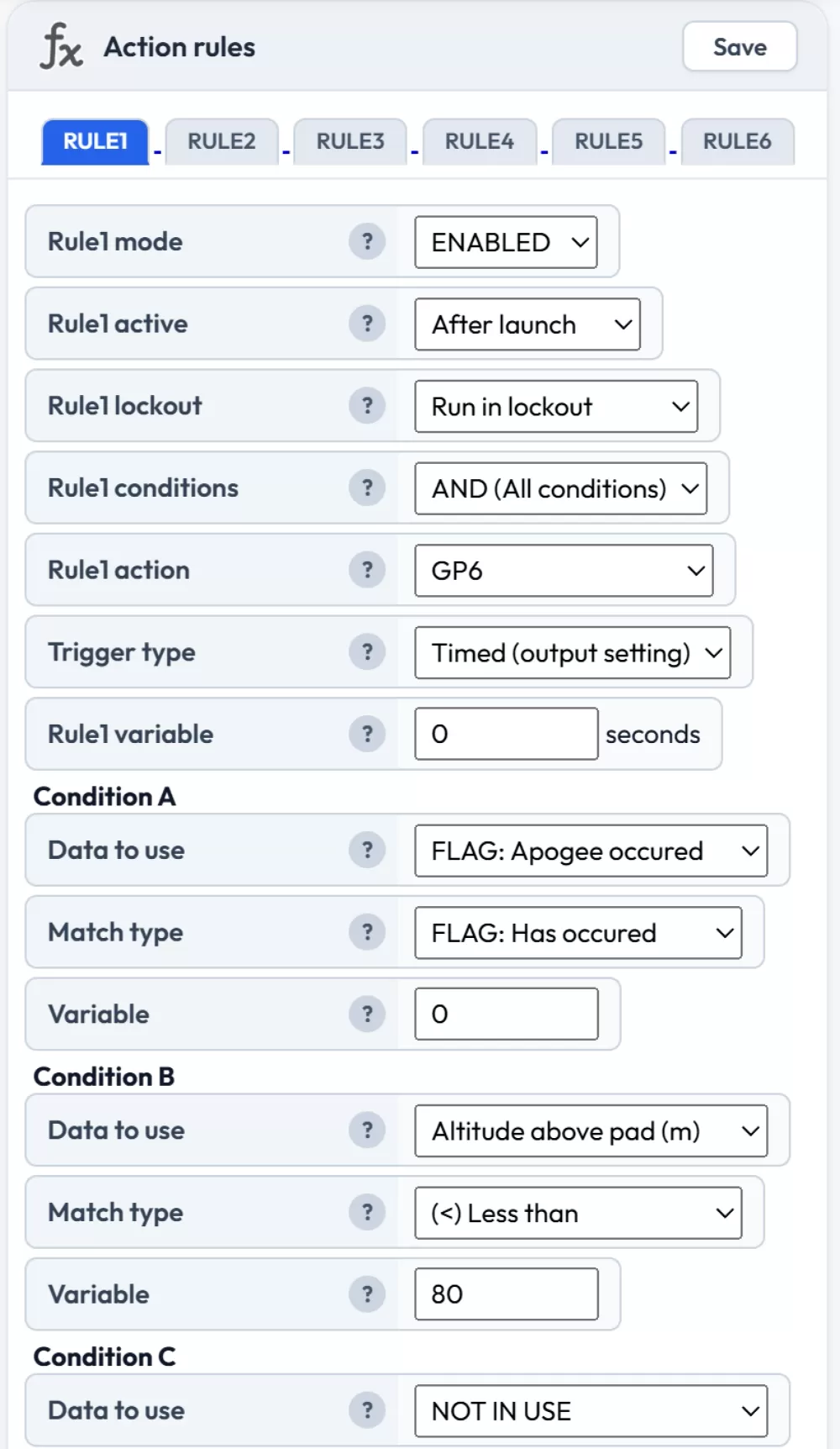
Règle 2 : récupération de basculement à 80 mètres via GP6
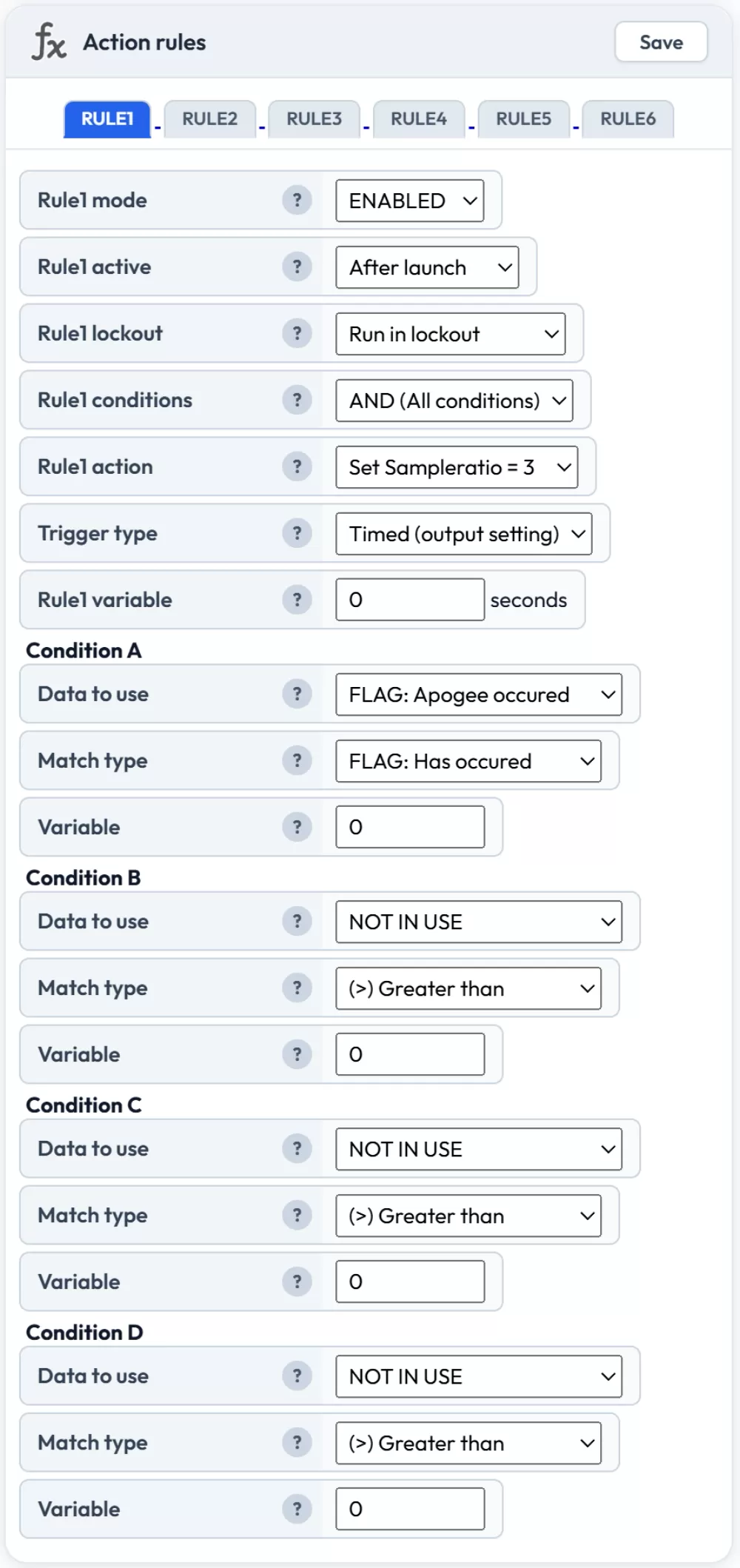
Exemple : Augmenter le ratio d'échantillonnage 20 secondes après l'apogée
Cet exemple réduit le taux d'enregistrement après la phase de vol actif pour prolonger le temps d'enregistrement total. Le ratio d'échantillonnage est défini sur 2 (enregistrement à chaque autre échantillon) quand 20 secondes après l'apogée ont passé.
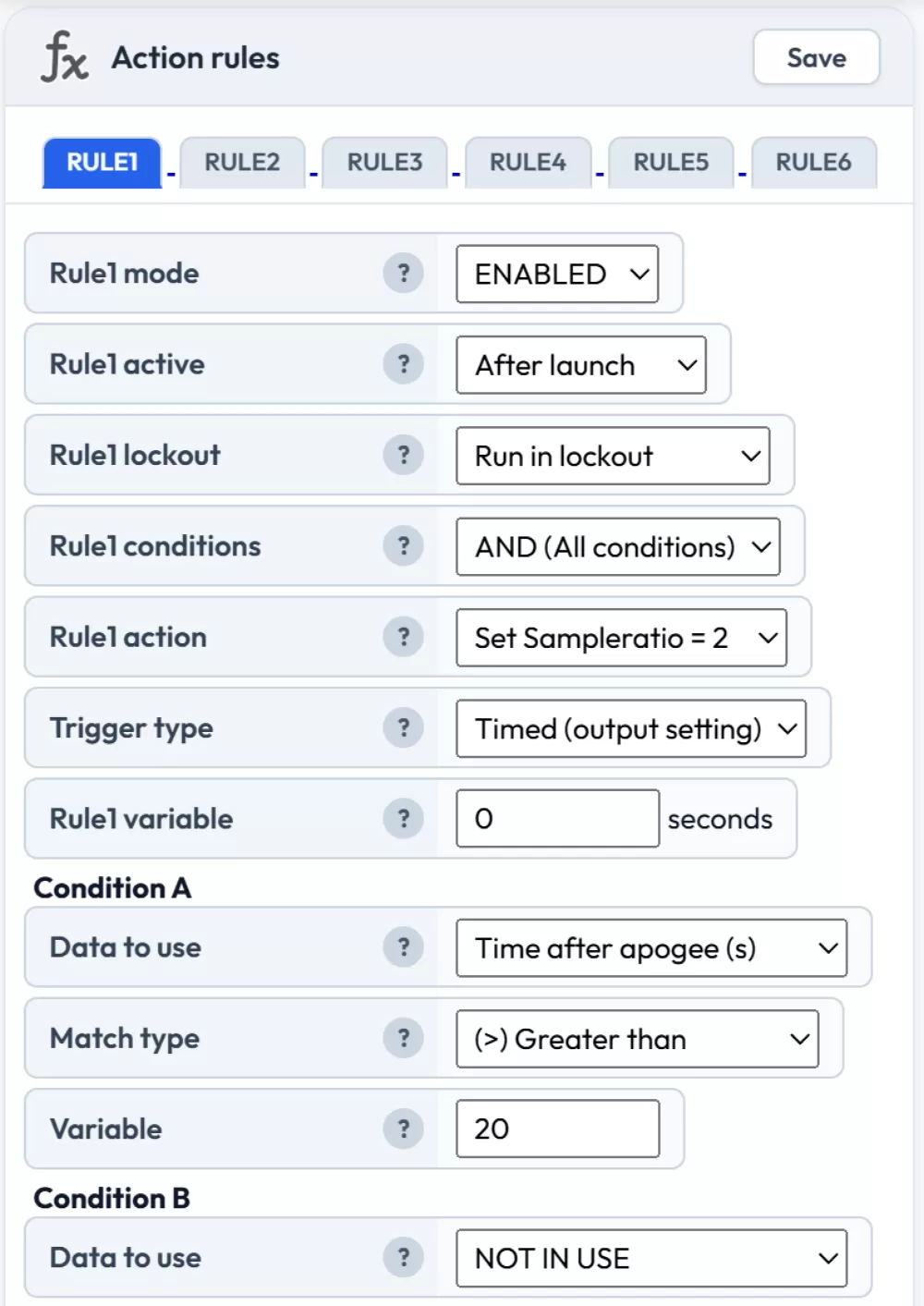
Un ratio d'échantillonnage de 2 signifie que nous enregistrons chaque autre échantillon dans le journal de vol
Exemple : Bloquer les règles jusqu'à 10 secondes après le lancement
Cet exemple empêche toutes les autres règles de s'exécuter jusqu'à 10 secondes après la détection du lancement. Utile comme mesure de sécurité pour éviter les déploiements prématurés pendant la phase de propulsion.
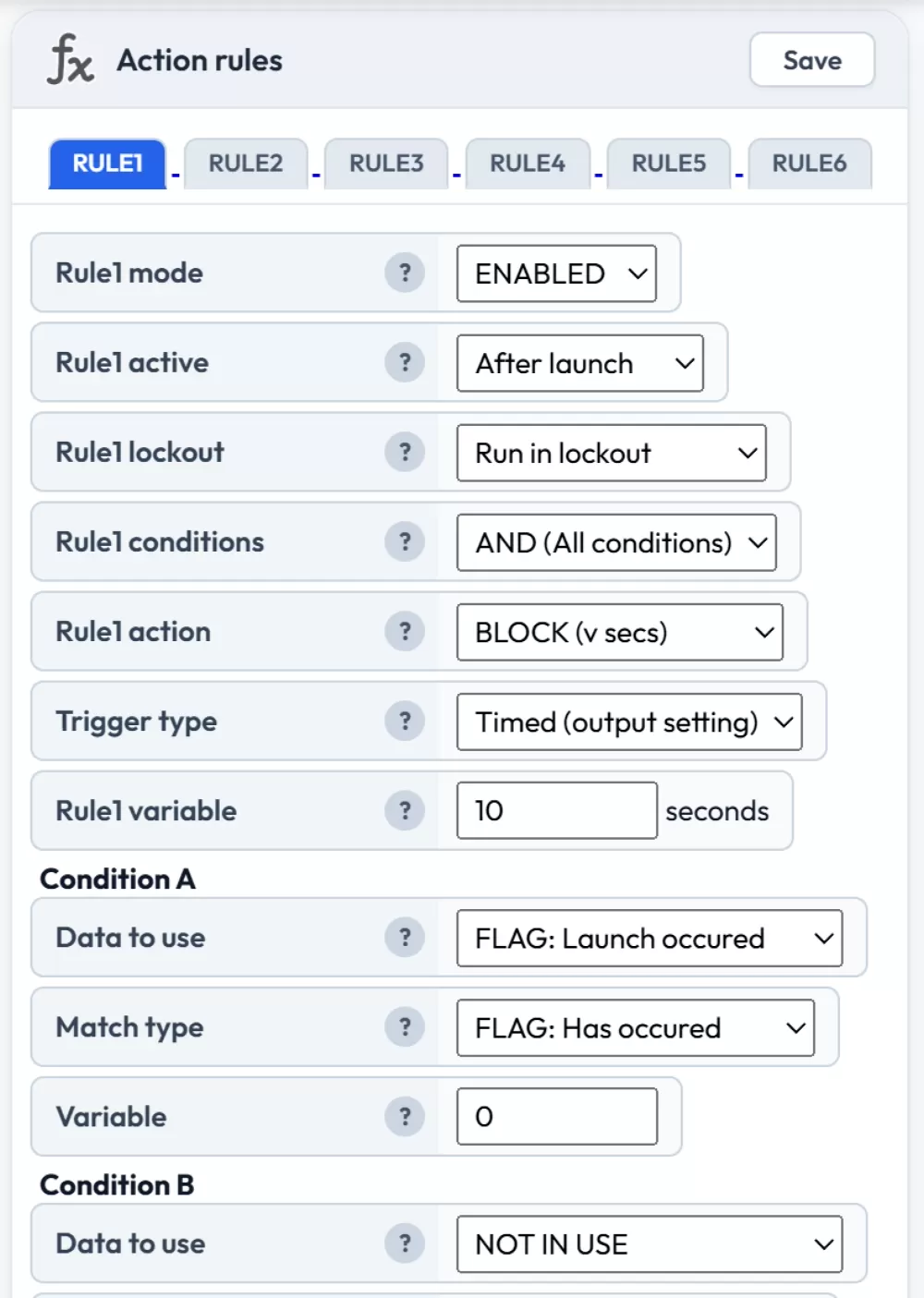
Utilise BLOCK (v secs) avec la variable de règle définie à 10
Exemple : Utiliser un servo I2C pour déployer un système de récupération
Cet exemple déclenche un servo pour déployer un système de récupération. Il attend jusqu'à au moins 4 secondes après la détection du lancement et jusqu'à ce que la vitesse ait chuté en dessous de 20 mètres par seconde.
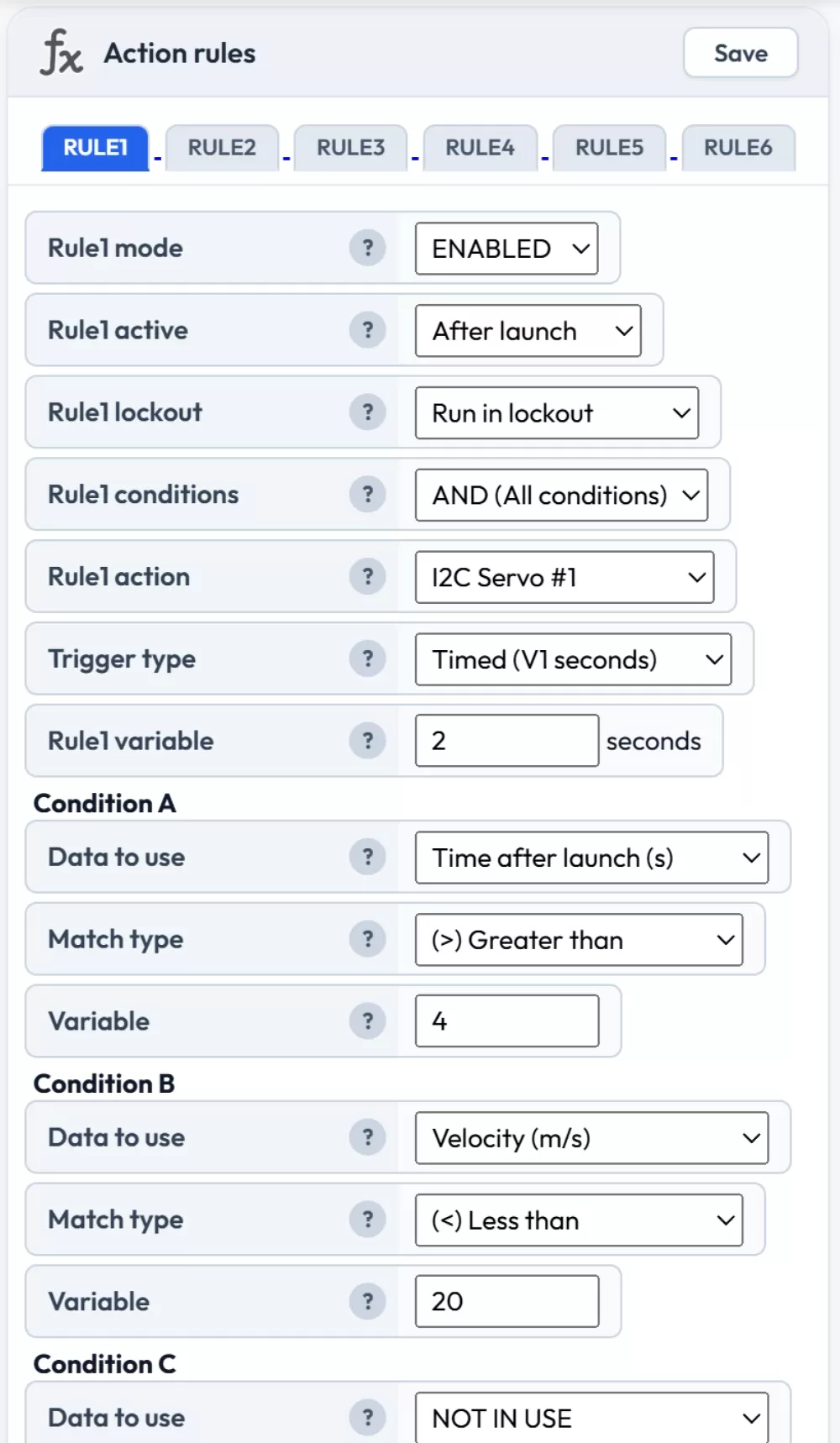
Configurez les servos dans les paramètres d'expansion du servo I2C
Exemple : Latch ON / Latch OFF pour sortie continue
Le type de déclenchement latch est utile quand vous avez besoin qu'une sortie reste active pendant une durée imprévisible. Par exemple, vous pourriez vouloir activer un buzzer après l'atterrissage et le maintenir actif jusqu'à ce que la batterie descende en dessous d'un seuil.
Règle 1 : Définissez l'action sur OUTPUT #1, le type de déclenchement sur « Latch ON », avec une condition « FLAG: L'atterrissage s'est produit » — « FLAG: S'est produit ».
Règle 2 : Définissez l'action sur OUTPUT #1, le type de déclenchement sur « Latch OFF », avec une condition « Batterie (%) » inférieur à 10.
La sortie s'activera quand l'atterrissage est détecté et restera active jusqu'à ce que la batterie descende en dessous de 10%.
Exemple : Démarrage en vol multi-étage avec détection d'étage
Pour les fusées multi-étages, vous pouvez utiliser les conditions spécifiques à l'étage pour contrôler chaque étage indépendamment. Par exemple, pour allumer un moteur de deuxième étage 0,5 seconde après la fin de combustion de la première étape avec protection contre l'inclinaison :
Condition A : « FLAG: La fin de combustion s'est produit » — « FLAG: S'est produit »
Condition B : « Temps après la fin de combustion (s) » supérieur à 0,5
Condition C : « Angle d'inclinaison (degrés) » inférieur à 30
Vous pouvez ensuite utiliser « Temps après l'allumage 2 » et « FLAG: La fin de combustion 2 s'est produit » dans les règles suivantes pour gérer le déploiement de récupération par rapport au profil de vol de la deuxième étape.
Exemple : Déploiement double avec basculement utilisant (A+B) OR (C+D)
Le mode de condition groupée vous permet de combiner un déclenchement principal et une sauvegarde de basculement dans une seule règle. Par exemple, pour déployer un parachute principal soit à l'altitude normale soit après un délai d'expiration :
Définissez le mode des conditions sur (A+B) OR (C+D), puis :
Condition A : « FLAG: L'apogée s'est produit » — « FLAG: S'est produit »
Condition B : « Altitude au-dessus du pas (m) » inférieur à 150
Condition C : « Temps après le lancement (s) » supérieur à 60
Condition D : « Vitesse (m/s) » inférieur à 5
Ceci déclenche la sortie si (l'apogée s'est produit ET l'altitude est inférieure à 150 m) OU (plus de 60 secondes se sont écoulées depuis le lancement ET la fusée bouge à peine). La deuxième paire agit comme un basculement en cas d'échec de la détection d'apogée. Nécessite le firmware 2.3 ou ultérieur.