Es ist möglich, Servos an das Mercury-Altimeter anzuschließen und sie für alle möglichen Funktionen in Ihrer Modellrakete zu nutzen, z. B. zum Ausfahren von Luftbremsen, Auslösen von Bergungssystemen, Steuern von Flügelwinkeln oder zum Auswerfen von Nutzlasten.
Der Konfigurationsprozess ist in zwei Schritte unterteilt. Zunächst konfigurieren Sie Ihre Servos, einschließlich des Winkels bei AUS und AN sowie die Bewegungsstrecke des Servos bei Auslösung. Anschließend verwenden Sie das Action-Rules-System, um zu konfigurieren, wann Ihre Servos basierend auf Flugbedingungen ausgelöst werden sollen.
Sie können zwei Servos direkt über die Lötpads GP6 und GP7 auf der PCB von Mercury anschließen, oder verwenden Sie ein externes I2C-Erweiterungsboard für bis zu 6 Kanäle. Alle I2C-Boards mit einem PCA9685-Chip sollten mit Ihrem Mercury-Altimeter funktionieren.
Option 1: Lötpads GP6 und GP7
Das Mercury hat zwei universelle Lötpads (GP6 und GP7), die jeweils unabhängig voneinander entweder als Standard-HIGH/LOW-Ausgang oder als Servo-Signalausgang konfiguriert werden können. Erfordert Firmware 2.0 oder höher.
Bei Verwendung der Lötpads wird das Servo-Signal wie konfiguriert ausgegeben. Sie müssen die Masse (GND) des Mercury mit der Stromversorgung Ihres Servos verbinden, damit dies ordnungsgemäß funktioniert.
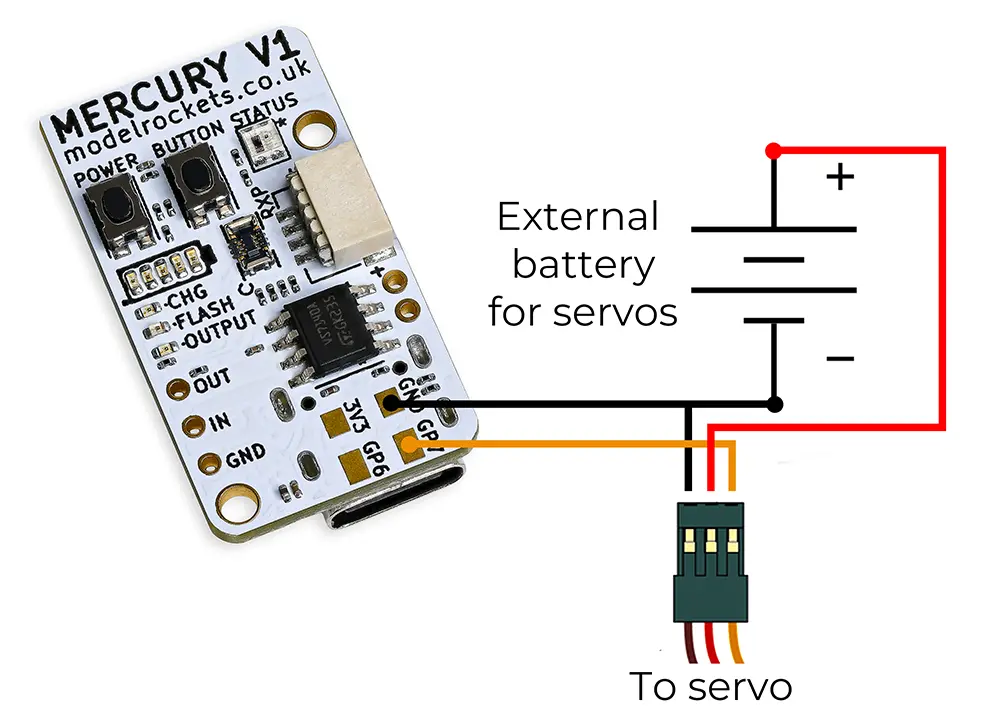
Beispielverkabelung für das GP7-Lötpad
Einstellen des Modus
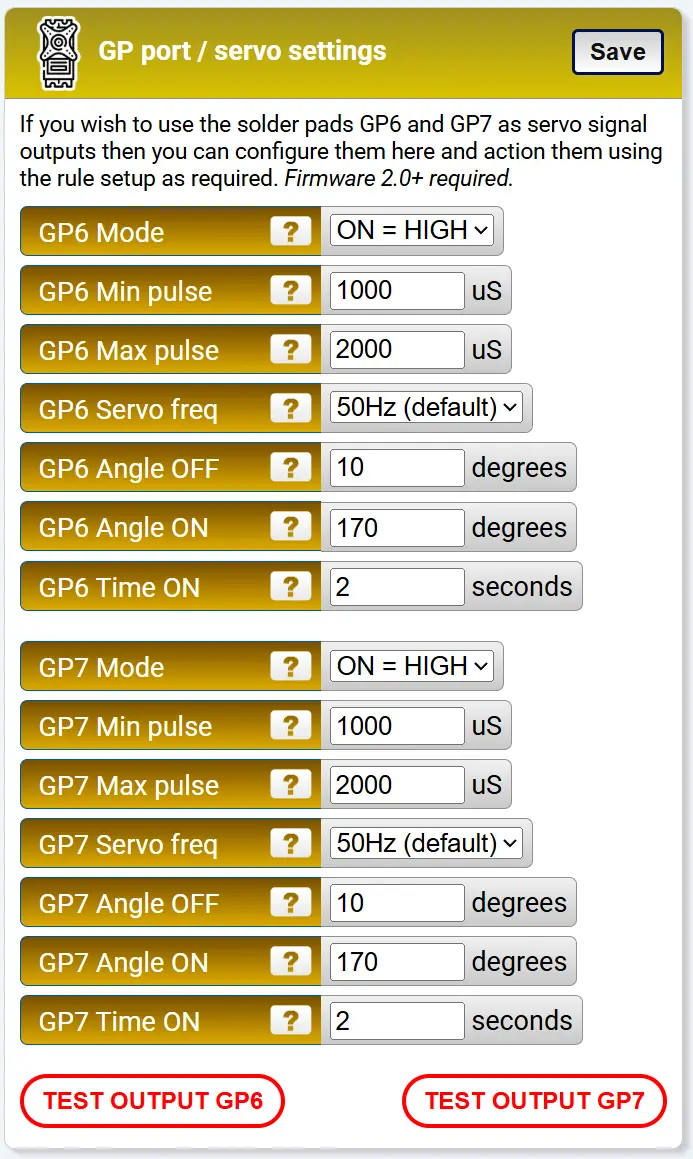
Die GP-Port-Einstellungen auf der Einstellungsseite

Ändern Sie den Modus für jedes Pad, das Sie verwenden möchten, zu SERVO
Jedes Pad hat drei Modusoptionen:
- ON = HIGH — Standard-Ausgang, wird bei Auslösung hochgezogen (3,3 V)
- ON = LOW — Standard-Ausgang, wird bei Auslösung auf Nullpegel gezogen (0 V)
- SERVO — gibt ein PWM-Servo-Signal bei Auslösung aus
Konfigurieren des Servos
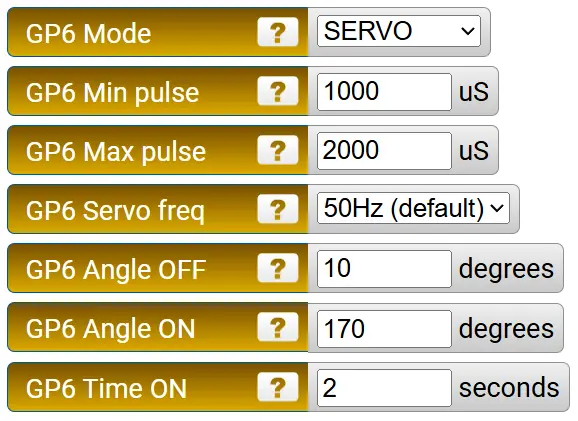
Die Servo-Einstellungen für jeden GP-Kanal
Sobald der Modus auf SERVO eingestellt ist, werden die folgenden Einstellungen für jeden Kanal angezeigt:
Min pulse (µS) — die minimale Breite des Servo-Signalpulses. Überprüfen Sie das Datenblatt Ihres Servos für diesen Wert. Der Standard funktioniert bei den meisten Standard-Servos.
Max pulse (µS) — die maximale Breite des Servo-Signalpulses. Überprüfen Sie bei Bedarf auch das Datenblatt Ihres Servos.
Servo frequency — die meisten Standard-Servos arbeiten mit 50 Hz, obwohl schnellere Servos verfügbar sind. Die Optionen sind 50 Hz (Standard), 200 Hz, 333 Hz und 560 Hz. Jeder GP-Kanal kann seine eigene Frequenz haben.
Angle OFF — der Winkel, zu dem sich das Servo bewegt, wenn es nicht durch eine Regel ausgelöst wird. Dies ist die Ruheposition.
Angle ON — der Winkel, zu dem sich das Servo bewegt, wenn es durch eine Regel ausgelöst wird. Dies ist die aktive Position.
Time ON — wie lange das Servo in der AN-Position bleiben soll, wenn es ausgelöst wird, in Sekunden. Stellen Sie dies auf einen hohen Wert (z. B. 99999) ein, wenn Sie möchten, dass es während des gesamten Flugs aktiv bleibt. Sie können auch die Auslösetypen „Latch ON/OFF" in den Action Rules für mehr Kontrolle verwenden.
Klicken Sie auf die Test-Schaltfläche, sobald alles angeschlossen ist, um zu überprüfen, ob es funktioniert und ob die eingestellten Positionen für Ihre Anforderungen richtig sind.
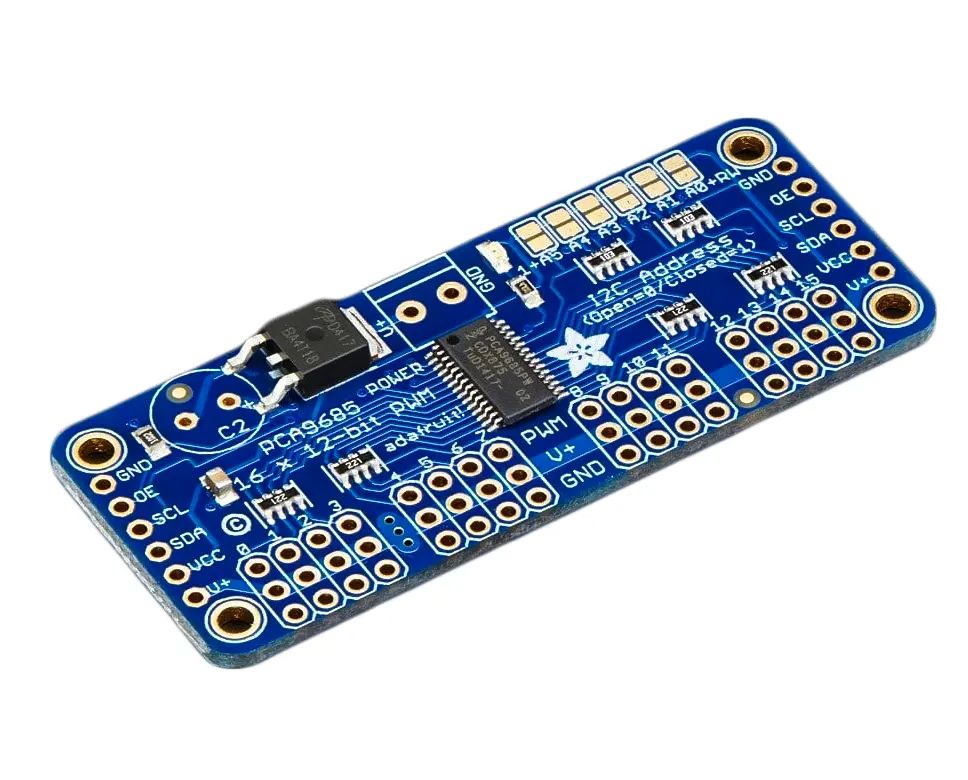
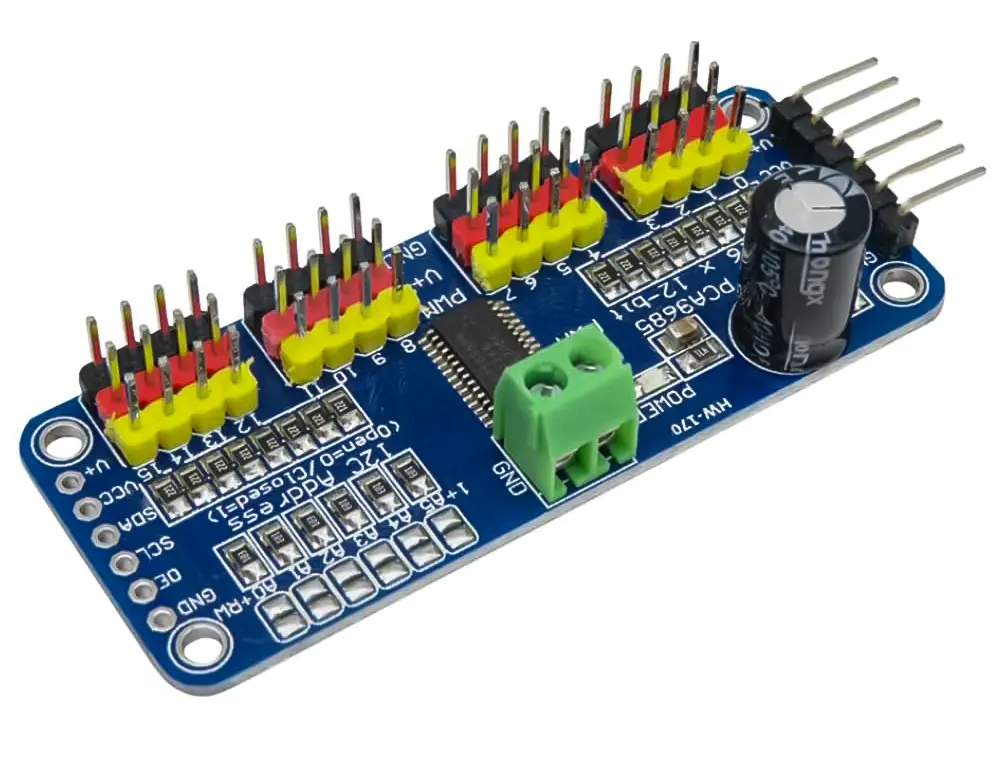
Option 2: I2C PCA9685-Erweiterungsboard
Wenn Sie nicht an Ihrem Mercury löten möchten oder mehr als 2 Servo-Kanäle benötigen, können Sie ein externes I2C-Servo-Board verwenden. Das Mercury ist mit PCA9685-basierten Boards kompatibel, die weit verbreitet und preiswert sind. Sie können die ersten 6 Servo-Kanäle mit Ihrem Mercury verwenden und in den Einstellungen konfigurieren. Erfordert Firmware 2.0 oder höher.
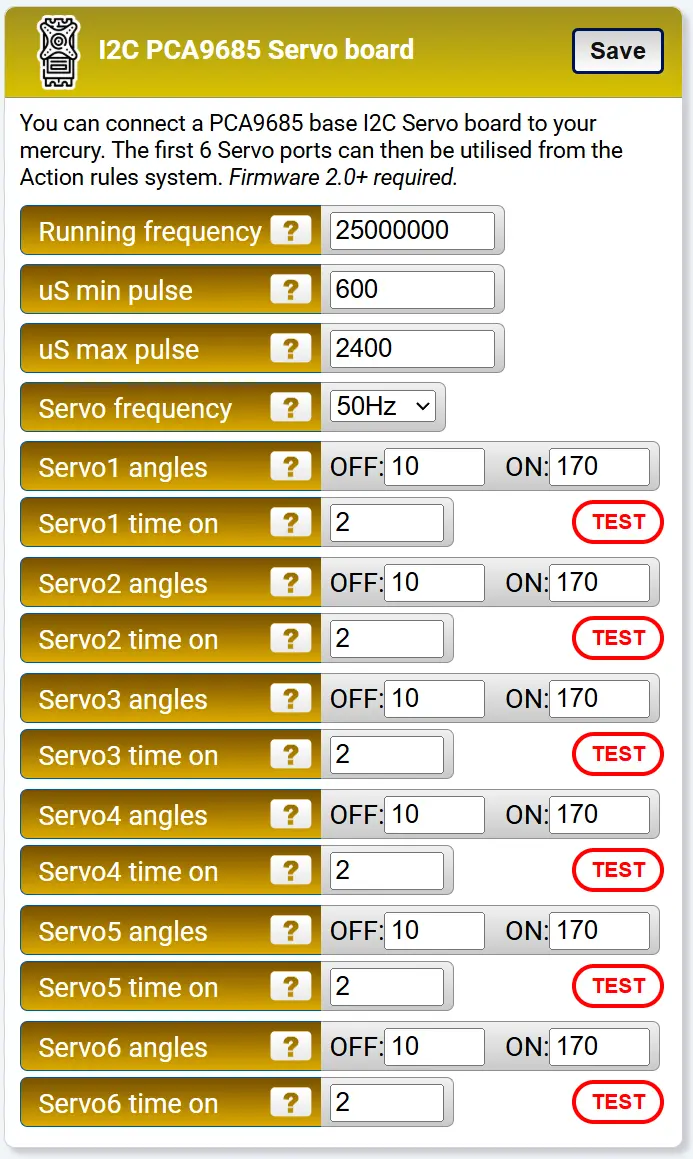
Der Konfigurationsblock für I2C-Servo-Boards
Board-Einstellungen
Running frequency — der PCA9685 hat einen internen Oszillator, der mit 23 bis 27 MHz laufen kann. Der Standard von 25 MHz liegt genau in der Mitte und funktioniert gut bei den meisten Boards. Sie können diese Frequenz optimieren, wenn Sie die tatsächliche Oszillatorgeschwindigkeit Ihres Boards messen, obwohl dies nicht erforderlich ist.
Min pulse (µS) — die minimale Servo-Signalpulsbreite. Alle Servos auf dem I2C-Board teilen sich diese Einstellung, daher müssen sie die gleichen Spezifikationen haben.
Max pulse (µS) — die maximale Servo-Signalpulsbreite. Wird wie der minimale Puls über alle Kanäle hinweg geteilt.
Servo frequency — die PWM-Frequenz für alle Kanäle. Optionen sind 50 Hz (Standard), 200 Hz, 333 Hz und 560 Hz. Alle Servos auf dem Board laufen mit der gleichen Frequenz.
Externe CMOS-Uhr
Ext clock — der interne Oszillator des PCA9685 ist nicht völlig präzise. Wenn Ihr Board einen externen CMOS-Oszillator angeschlossen hat, der mit dem EXTCLK-Pin verbunden ist, können Sie zu diesem wechseln, um eine genauere und stabilere Servo-Steuerung zu erreichen. Stellen Sie dies auf „External CMOS" ein und passen Sie die obige Lauffrequenz an Ihren externen Oszillator an (z. B. 25000000 für einen 25-MHz-Oszillator). Lassen Sie es auf „Internal (default)" eingestellt, wenn Ihr Board keine externe Uhr hat.
Pro-Kanal-Winkel
Jeder der 6 Servo-Kanäle hat seine eigenen AUS- und AN-Winkeleinstellungen, genau wie die GP-Pads. Stellen Sie den AUS-Winkel auf Ihre Ruheposition und den AN-Winkel auf die aktive Position ein. Das Action-Rules-System steuert dann, welche Servos ausgelöst werden und wann, mit den Aktionen „I2C Servo #1" bis „#6".
Empfohlene Boards
Wir haben die folgenden zwei Boards getestet.
Amazon PCA9685 Board — £5,99 (zum Zeitpunkt des Schreibens)
Dieses preiswerte Board funktioniert gut und ist eine großartige Budget-Option.
Adafruit PCA9685 Board — £14,40 (zum Zeitpunkt des Schreibens)
Eine Version einer bekannten Elektronikmarke mit guter Dokumentation.