É possível conectar servos ao altimeter Mercury e usá-los para executar diversos funções no seu foguete modelo, como implantar air brakes, acionar sistemas de recuperação, controlar ângulos de aletas ou liberar cargas úteis.
O processo de configuração é dividido em duas etapas. Primeiro, você configura seus servos, incluindo o ângulo quando DESLIGADO e LIGADO e quanto o servo deve se mover quando acionado. Segundo, você usa o sistema de action rules para configurar quando acionar seus servos com base nas condições de voo.
Você pode conectar dois servos diretamente usando os pads de soldagem GP6 e GP7 na PCB do Mercury, ou usar uma placa de expansão I2C externa para até 6 canais. Qualquer placa I2C com um chip PCA9685 deve funcionar com seu altimeter Mercury.
Opção 1: Pads de soldagem GP6 e GP7
O Mercury tem dois pads de soldagem de propósito geral (GP6 e GP7) que podem ser configurados independentemente como saída HIGH/LOW padrão ou saída de sinal servo. Requer firmware 2.0 ou posterior.
Ao usar os pads de soldagem, estes fornecerão o sinal servo conforme configurado. Você precisará conectar o Ground (GND) do Mercury à fonte de energia do seu servo para que isso funcione corretamente.
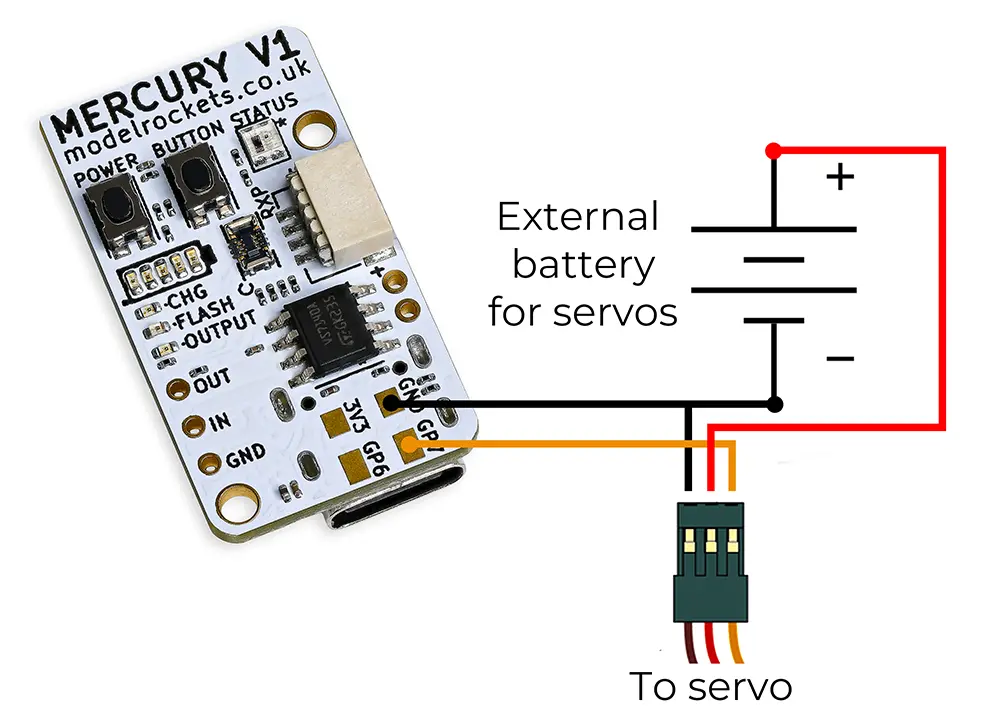
Exemplo de fiação para o pad de soldagem GP7
Configurando o modo
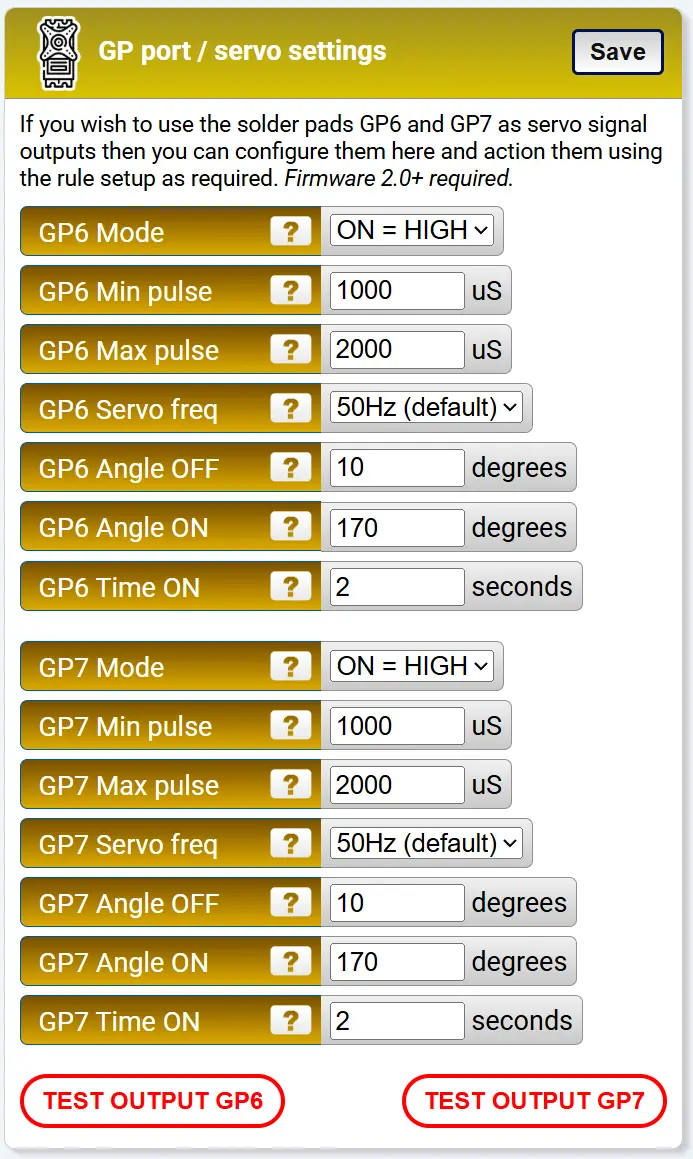
As configurações de porta GP na página de configurações

Altere o Modo para cada pad que deseja usar para SERVO
Cada pad tem três opções de modo:
- ON = HIGH — saída padrão, fica alta (3.3V) quando acionada
- ON = LOW — saída padrão, fica baixa (0V) quando acionada
- SERVO — fornece um sinal servo PWM quando acionado
Configurando o servo
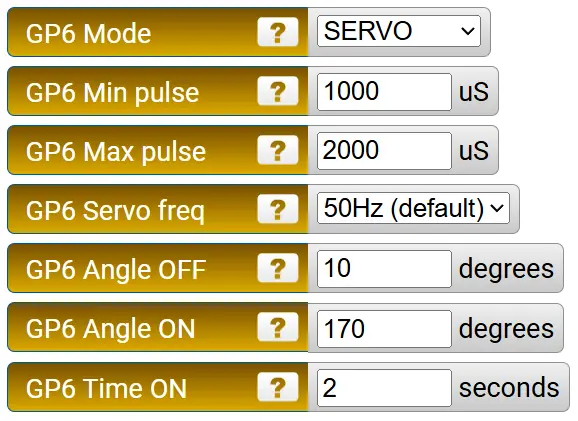
As configurações de servo para cada canal GP
Uma vez que o modo é definido como SERVO, as seguintes configurações aparecem para cada canal:
Min pulse (µS) — a largura mínima do pulso do sinal servo. Verifique a folha de dados do seu servo para este valor. O padrão funciona para a maioria dos servos padrão.
Max pulse (µS) — a largura máxima do pulso do sinal servo. Novamente, verifique a folha de dados do seu servo se necessário.
Servo frequency — a maioria dos servos padrão funciona em 50Hz, embora servos mais rápidos estejam disponíveis. As opções são 50Hz (padrão), 200Hz, 333Hz e 560Hz. Cada canal GP pode ter sua própria frequência.
Angle OFF — o ângulo para o qual o servo se move quando não está sendo acionado por uma regra. Esta é a posição de repouso.
Angle ON — o ângulo para o qual o servo se move quando acionado por uma regra. Esta é a posição ativa.
Time ON — quanto tempo o servo deve permanecer no ângulo ON quando acionado, em segundos. Configure isso para um valor alto (por exemplo, 99999) se você quiser que permaneça ligado durante todo o voo. Você também pode usar os tipos de gatilho Latch ON/OFF nas action rules para mais controle.
Fique à vontade para clicar no botão de teste quando tudo estiver conectado para verificar se funciona e ver se as posições que você definiu são adequadas para suas necessidades.
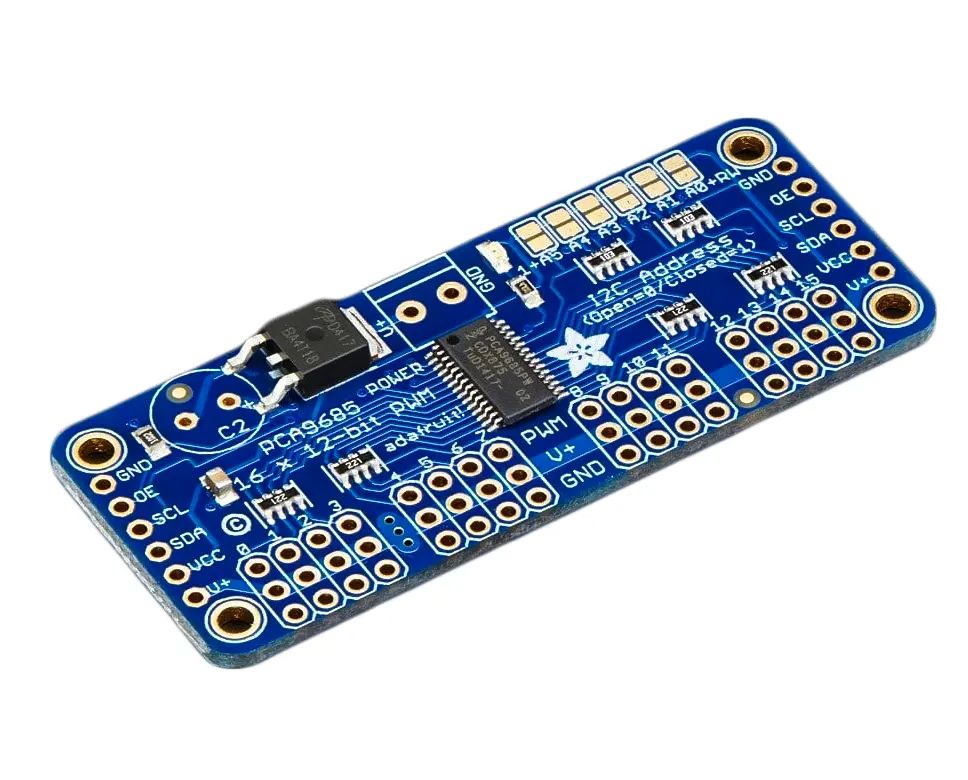
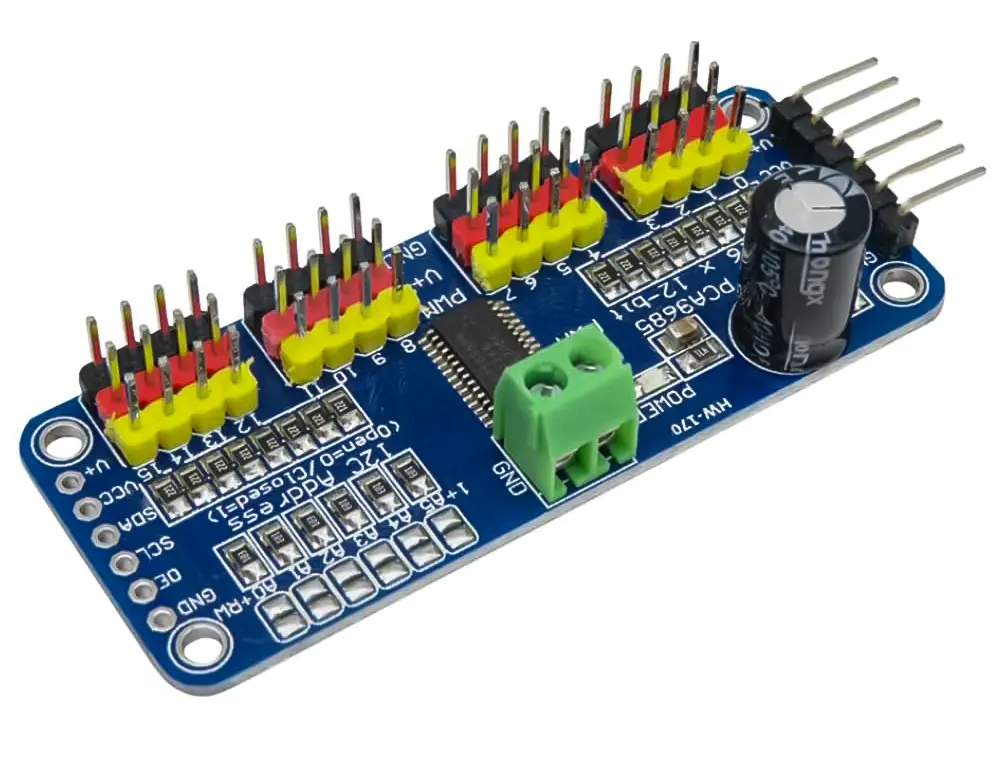
Opção 2: Placa de expansão I2C PCA9685
Se você não quiser soldar seu Mercury, ou precisar de mais de 2 canais de servo, pode usar uma placa de servo I2C externa. O Mercury é compatível com placas baseadas em PCA9685, que estão amplamente disponíveis e são baratas. Você pode usar os primeiros 6 canais de servo com seu Mercury e configurá-los nas configurações. Requer firmware 2.0 ou posterior.
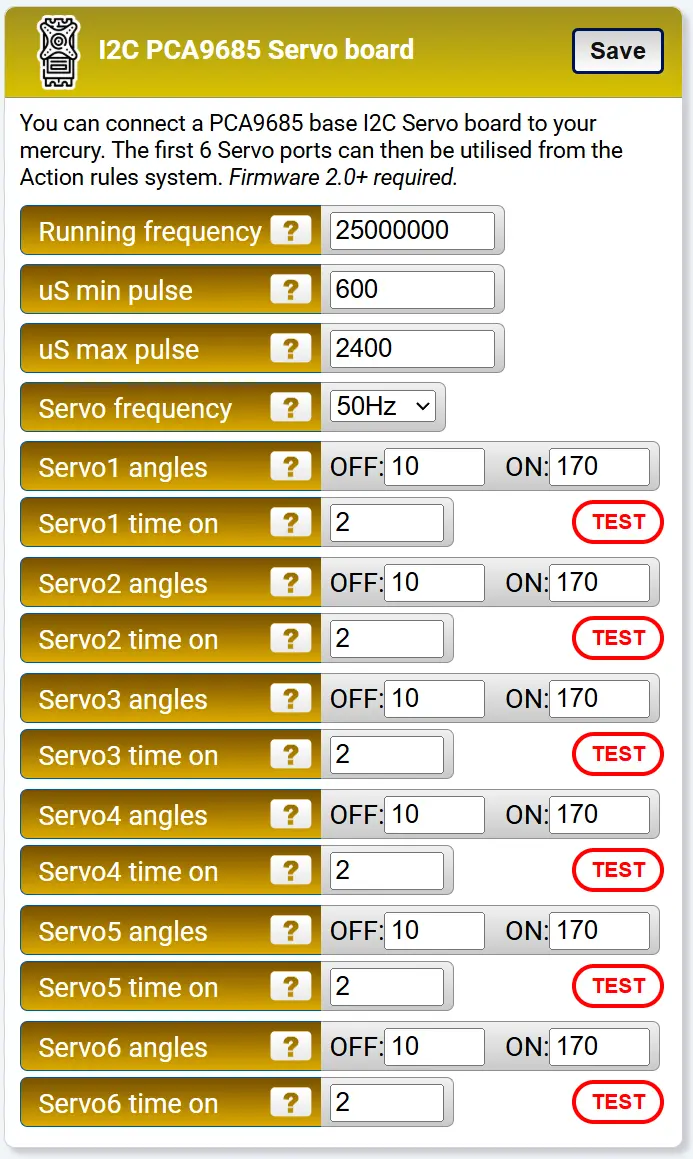
O bloco de configuração para placas de servo I2C
Configurações da placa
Running frequency — o PCA9685 possui um oscilador interno que pode funcionar de 23 a 27 MHz. O padrão de 25 MHz está bem no meio e funciona bem para a maioria das placas. Você pode ajustar esta frequência se medir a velocidade do oscilador real da sua placa, embora isso não seja essencial.
Min pulse (µS) — a largura mínima do pulso do sinal servo. Todos os servos na placa I2C compartilham esta configuração, portanto precisam ter a mesma especificação.
Max pulse (µS) — a largura máxima do pulso do sinal servo. Compartilhada em todos os canais como o pulso mínimo.
Servo frequency — a frequência PWM para todos os canais. As opções são 50Hz (padrão), 200Hz, 333Hz e 560Hz. Todos os servos na placa funcionam na mesma frequência.
Relógio CMOS externo
Ext clock — o oscilador interno do PCA9685 não é totalmente preciso. Se sua placa tiver um oscilador CMOS externo conectado ao pino EXTCLK, você pode mudar para usá-lo para um tempo de servo mais preciso e estável. Configure para "External CMOS" e ajuste a frequência de execução acima para corresponder ao seu oscilador externo (por exemplo, 25000000 para um oscilador de 25 MHz). Deixe em "Internal (default)" se sua placa não tiver um relógio externo instalado.
Ângulos por canal
Cada um dos 6 canais de servo tem suas próprias configurações de ângulo OFF e ON, assim como os pads GP. Configure o ângulo OFF para sua posição de repouso e o ângulo ON para a posição ativa. O sistema de action rules então controla quais servos são acionados e quando, usando as ações I2C Servo #1 a #6.
Placas recomendadas
Testamos com as seguintes duas placas.
Placa Amazon PCA9685 — £5.99 (na data de escrita)
Esta placa econômica funciona bem e é uma ótima opção orçamentária.
Placa Adafruit PCA9685 — £14.40 (na data de escrita)
Uma versão da marca de eletrônica conhecida com boa documentação.