Możliwe jest podłączenie serwomechanizmów do altimetru Mercury i używanie ich do wykonywania różnych funkcji w modelu rakiety, takich jak wdrażanie hamulców powietrznych, uruchamianie systemów ratunkowych, kontrola kątów skrzydeł lub zrzucanie ładunków.
Proces konfiguracji podzielony jest na dwa kroki. Po pierwsze, konfigurujesz serwomechanizmy, w tym kąt w pozycji OFF i ON oraz dystans, na jaki powinien się poruszyć serwomechanizm po wyzwoleniu. Po drugie, używasz systemu reguł akcji do konfiguracji, kiedy wyzwolić serwomechanizmy w oparciu o warunki lotu.
Możesz podłączyć dwa serwomechanizmy bezpośrednio, używając padów lutowniczych GP6 i GP7 na PCB altimetru Mercury, lub użyć zewnętrznej płytki rozszerzającej I2C do maksymalnie 6 kanałów. Każda płytka I2C z chipem PCA9685 powinna działać z twoim altimetrem Mercury.
Opcja 1: Pady lutownicze GP6 i GP7
Mercury ma dwie pady ogólnego przeznaczenia (GP6 i GP7), które mogą być niezależnie skonfigurowane jako standardowe wyjście HIGH/LOW lub wyjście sygnału serwomechanizmu. Wymaga firmware'u w wersji 2.0 lub nowszej.
Podczas używania padów lutowniczych będą one wyjściowe sygnału serwomechanizmu skonfigurowane w ustawieniach. Będziesz musiał podłączyć Ground (GND) altimetru Mercury do zasilania serwomechanizmu, aby to działało prawidłowo.
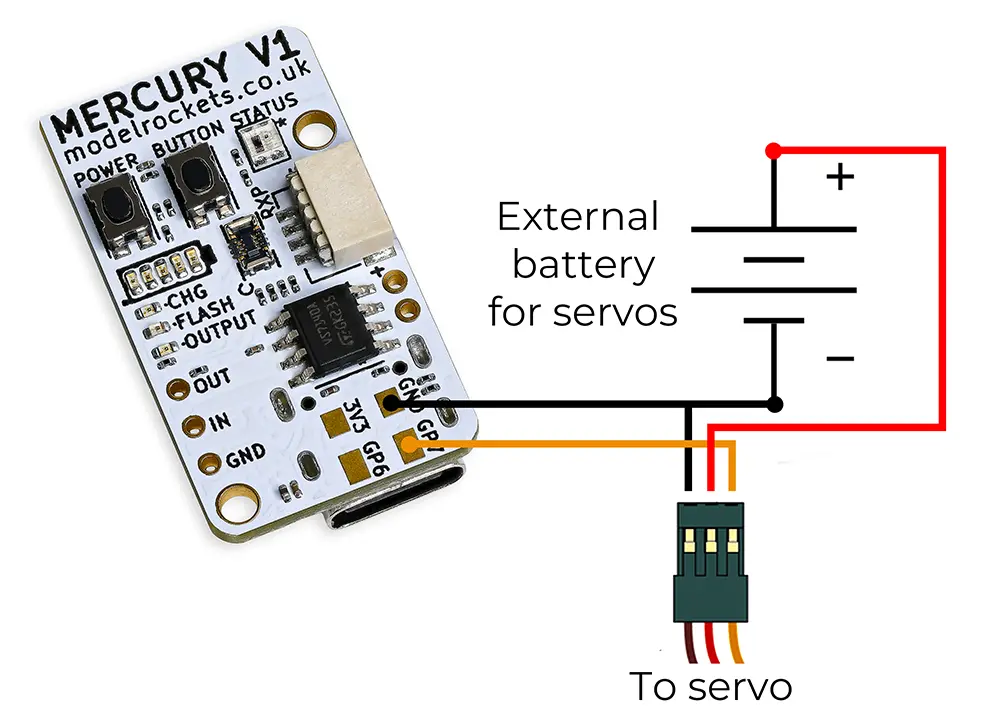
Przykład okablowania dla padu lutowniczego GP7
Ustawianie trybu
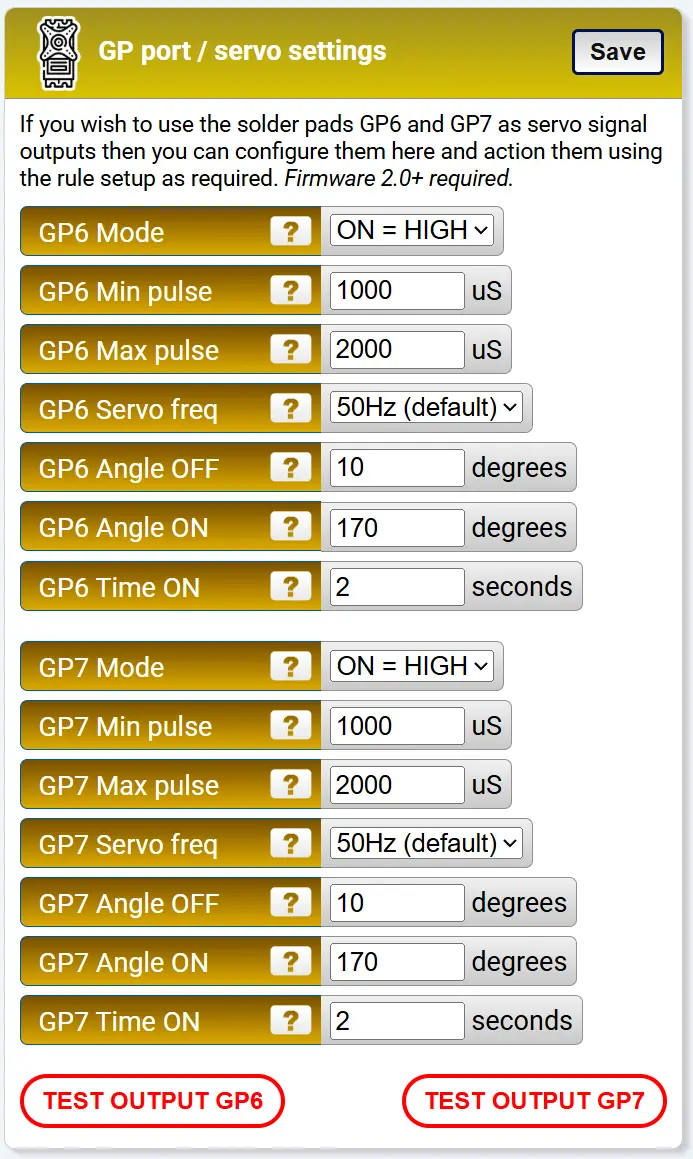
Ustawienia portu GP na stronie ustawień

Zmień Tryb dla każdego padu, który chcesz użyć, na SERVO
Każdy pad ma trzy opcje trybu:
- ON = HIGH — standardowe wyjście, przechodzi w stan wysoki (3,3V) po wyzwoleniu
- ON = LOW — standardowe wyjście, przechodzi w stan niski (0V) po wyzwoleniu
- SERVO — wyjściowy sygnał PWM serwomechanizmu po wyzwoleniu
Konfigurowanie serwomechanizmu
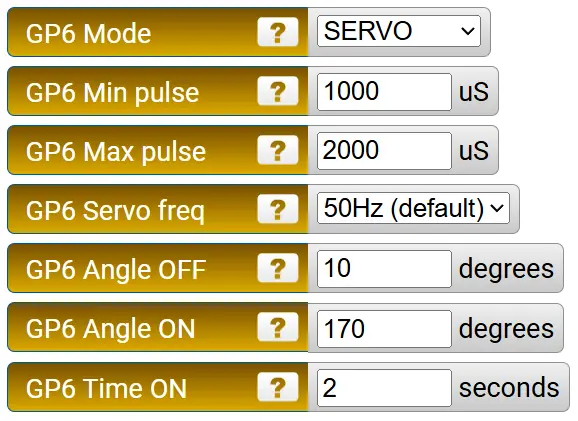
Ustawienia serwomechanizmu dla każdego kanału GP
Po ustawieniu trybu na SERVO pojawią się następujące ustawienia dla każdego kanału:
Min pulse (µS) — minimalna szerokość impulsu sygnału serwomechanizmu. Sprawdź kartę danych serwomechanizmu, aby uzyskać tę wartość. Wartość domyślna sprawdza się dla większości standardowych serwomechanizmów.
Max pulse (µS) — maksymalna szerokość impulsu sygnału serwomechanizmu. Ponownie, w razie potrzeby sprawdź kartę danych serwomechanizmu.
Servo frequency — większość standardowych serwomechanizmów pracuje na częstotliwości 50Hz, chociaż dostępne są szybsze serwomechanizmy. Opcje to 50Hz (domyślnie), 200Hz, 333Hz i 560Hz. Każdy kanał GP może mieć własną częstotliwość.
Angle OFF — kąt, na który przesuwa się serwomechanizm, gdy nie jest wyzwalany przez regułę. To jest pozycja spoczynkowa.
Angle ON — kąt, na który przesuwa się serwomechanizm po wyzwoleniu przez regułę. To jest pozycja aktywna.
Time ON — jak długo serwomechanizm powinien pozostać w kącie ON po wyzwoleniu, w sekundach. Ustaw tę wartość na wysoką wartość (np. 99999), jeśli chcesz, aby pozostał włączony przez cały lot. Możesz także używać typów wyzwalacza Latch ON/OFF w regułach akcji, aby uzyskać większą kontrolę.
Możesz kliknąć przycisk testowy, gdy wszystko jest podłączone, aby sprawdzić, czy działa i czy ustawione przez ciebie pozycje są odpowiednie dla twoich potrzeb.
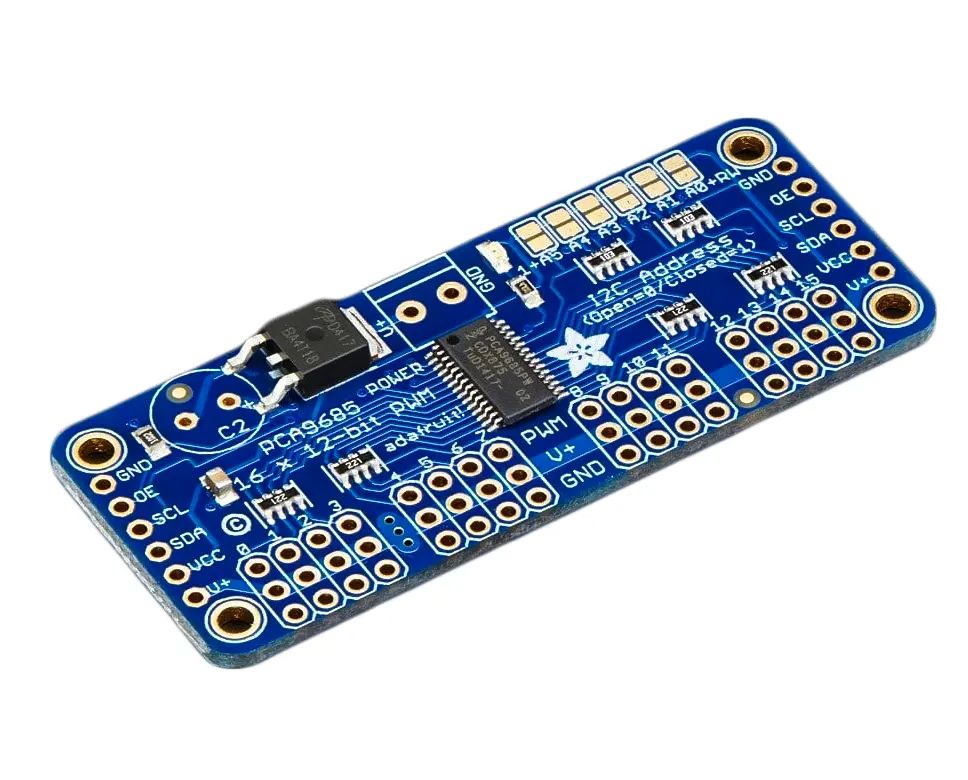
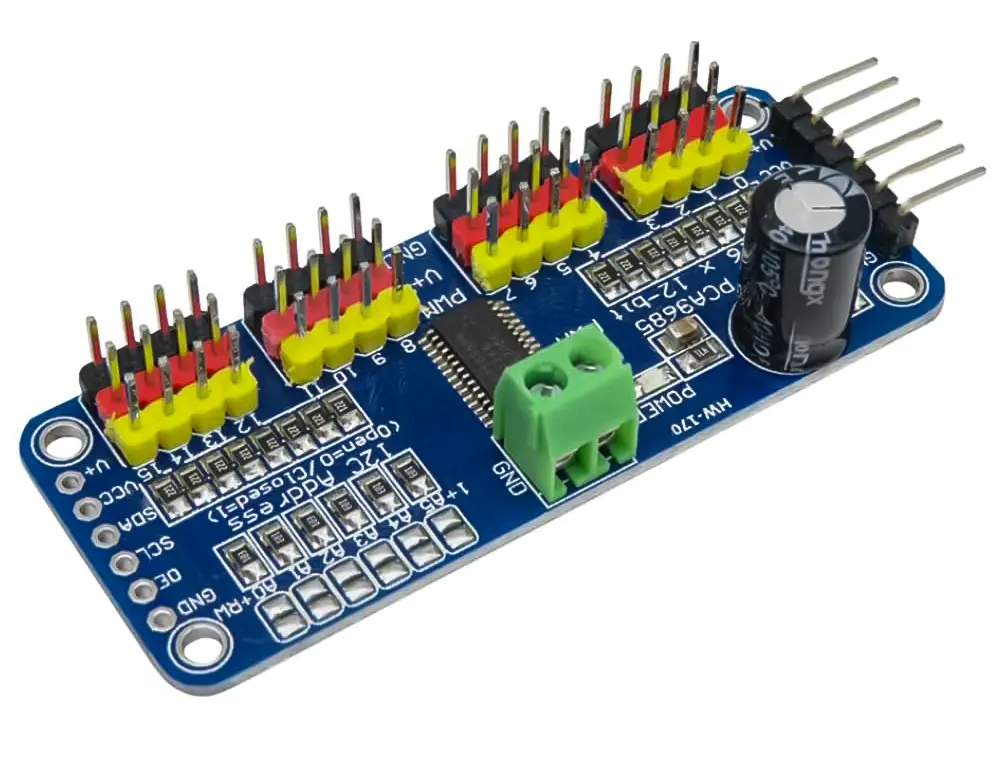
Opcja 2: Płytka rozszerzająca I2C PCA9685
Jeśli nie chcesz lutować do Mercury lub potrzebujesz więcej niż 2 kanały serwomechanizmu, możesz użyć zewnętrznej płytki serwomechanizmu I2C. Mercury jest kompatybilny z płytkami opartymi na PCA9685, które są powszechnie dostępne i niedrogie. Możesz używać pierwszych 6 kanałów serwomechanizmu z Mercury i konfigurować je w ustawieniach. Wymaga firmware'u w wersji 2.0 lub nowszej.
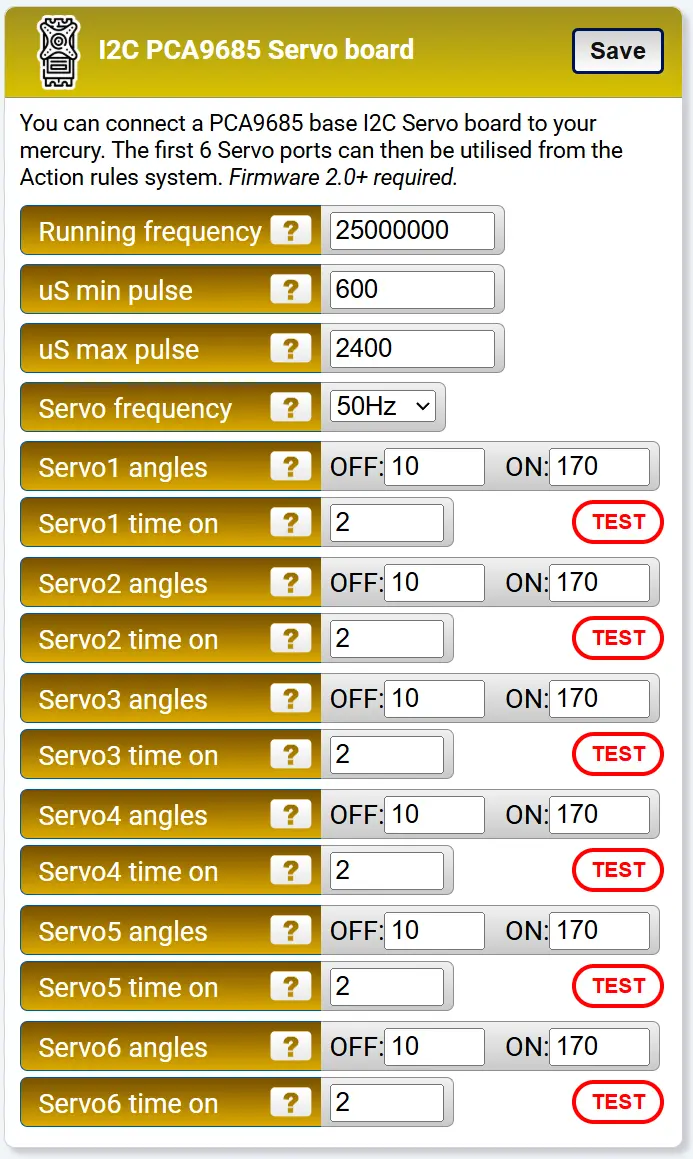
Blok konfiguracji dla płytek serwomechanizmów I2C
Ustawienia płytki
Running frequency — PCA9685 posiada wewnętrzny oscylator, który może pracować od 23 do 27 MHz. Wartość domyślna 25 MHz znajduje się dokładnie w środku i sprawdza się dobrze dla większości płytek. Możesz dostroić tę częstotliwość, jeśli zmierzysz rzeczywistą prędkość oscilatora płytki, chociaż nie jest to konieczne.
Min pulse (µS) — minimalna szerokość impulsu sygnału serwomechanizmu. Wszystkie serwomechanizmy na płytce I2C współdzielą to ustawienie, więc muszą mieć tę samą specyfikację.
Max pulse (µS) — maksymalna szerokość impulsu sygnału serwomechanizmu. Współdzielone na wszystkich kanałach tak jak min pulse.
Servo frequency — częstotliwość PWM dla wszystkich kanałów. Opcje to 50Hz (domyślnie), 200Hz, 333Hz i 560Hz. Wszystkie serwomechanizmy na płytce działają na tej samej częstotliwości.
Zewnętrzny zegar CMOS
Ext clock — wewnętrzny oscylator PCA9685 nie jest całkowicie precyzyjny. Jeśli twoja płytka ma zewnętrzny oscylator CMOS podłączony do pinu EXTCLK, możesz przełączyć się na jego użycie, aby uzyskać dokładniejsze i bardziej stabilne synchronizowanie serwomechanizmów. Ustaw to na „External CMOS" i dostosuj powyższą częstotliwość uruchamiania, aby dopasować twój zewnętrzny oscylator (np. 25000000 dla oscilatora 25 MHz). Pozostaw „Internal (default)", jeśli twoja płytka nie ma zainstalowanego zewnętrznego zegara.
Kąty na kanał
Każdy z 6 kanałów serwomechanizmu ma własne ustawienia kąta OFF i ON, tak jak pady GP. Ustaw kąt OFF na pozycję spoczynkową, a kąt ON na pozycję aktywną. System reguł akcji kontroluje następnie, które serwomechanizmy są wyzwalane i kiedy, używając akcji I2C Servo #1 do #6.
Rekomendowane płytki
Testowaliśmy następujące dwie płytki.
Płytka Amazon PCA9685 — £5.99 (w momencie pisania)
Ta niedroża płytka działa dobrze i jest świetną opcją dla oszczędnych.
Płytka Adafruit PCA9685 — £14.40 (w momencie pisania)
Wersja znanej marki elektroniki z dobrą dokumentacją.