Je možné připojit serva k altimetru Mercury a používat je k provádění nejrůznějších funkcí u vaší modelové rakety, jako je nasazení vzduchových brzd, spuštění systémů zotavení, řízení úhlů křídel nebo uvolňování užitečného zatížení.
Proces konfigurace je rozdělen do dvou kroků. Nejprve nakonfigurujete servá, včetně úhlu, kdy jsou VYPNUTÁ a ZAPNUTÁ, a jak daleko by se mělo servo posunout při spuštění. Poté použijete systém pravidel akcí ke konfiguraci, kdy se mají servá spustit na základě podmínek během letu.
Můžete připojit dvě servá přímo pomocí pájecích plošek GP6 a GP7 na desce Mercury, nebo použít externí expanzní desku I2C pro až 6 kanálů. Jakákoli deska I2C s čipem PCA9685 by měla fungovat s vaším altimetrem Mercury.
Možnost 1: Pájecí plošky GP6 a GP7
Mercury má dvě pájecí plošky pro všeobecné účely (GP6 a GP7), které lze každou konfigurovat nezávisle jako standardní výstup HIGH/LOW nebo jako výstup signálu servomotoru. Vyžaduje firmware 2.0 nebo novější.
Při použití pájecích plošek budou výstupem signál servomotoru tak, jak je nakonfigurován. Budete muset připojit Ground (GND) Mercury k napájecímu zdroji vašeho servomotoru, aby to fungovalo správně.
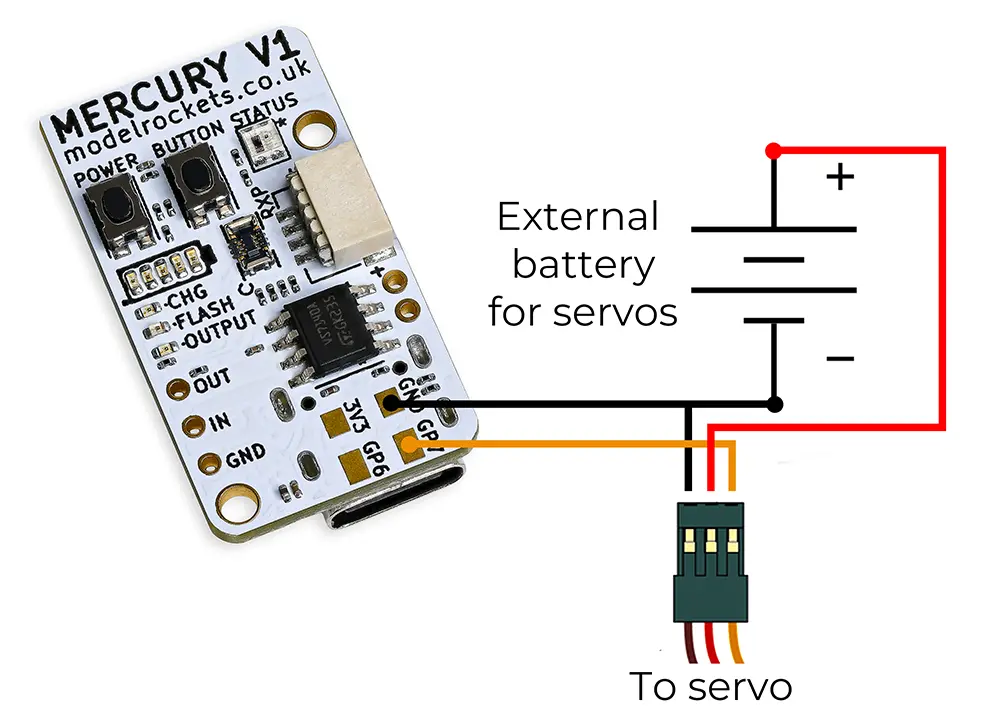
Příklad zapojení pájecí plošky GP7
Nastavení režimu
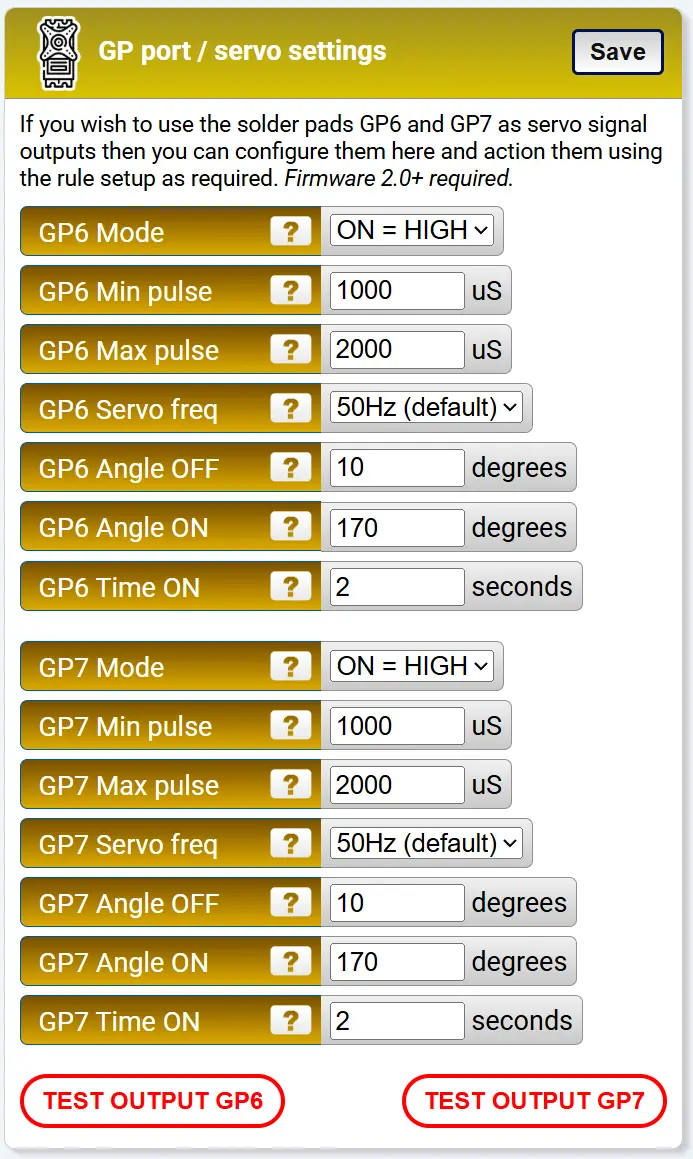
Nastavení portu GP na stránce nastavení

Změňte Režim pro každou plošku, kterou chcete používat, na SERVO
Každá ploška má tři možnosti režimu:
- ON = HIGH — standardní výstup, jde vysoko (3,3V) po spuštění
- ON = LOW — standardní výstup, jde nízko (0V) po spuštění
- SERVO — výstup signálu PWM servomotoru po spuštění
Konfigurace servomotoru
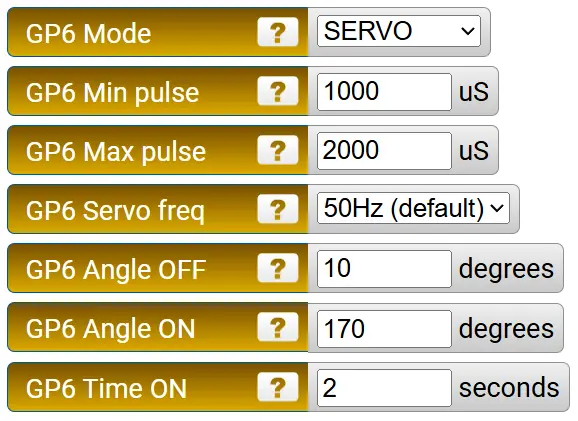
Nastavení servomotoru pro každý kanál GP
Jakmile je režim nastaven na SERVO, pro každý kanál se zobrazí následující nastavení:
Min pulse (µS) — minimální šířka pulzu signálu servomotoru. Ověřte si tuto hodnotu v datasheetu vašeho servomotoru. Výchozí hodnota funguje pro większost standardních servomotorů.
Max pulse (µS) — maximální šířka pulzu signálu servomotoru. Pokud je třeba, znovu zkontrolujte datashee vašeho servomotoru.
Servo frequency — většina standardních servomotorů pracuje na 50Hz, ačkoli jsou dostupné i rychlejší servomotory. Možnosti jsou 50Hz (výchozí), 200Hz, 333Hz a 560Hz. Každý kanál GP může mít svou vlastní frekvenci.
Angle OFF — úhel, na který se servomotor posune, když není spuštěn pravidlem. Toto je klidová poloha.
Angle ON — úhel, na který se servomotor posune po spuštění pravidlem. Toto je aktivní poloha.
Time ON — jak dlouho by měl servomotor zůstat na úhlu ON po spuštění, v sekundách. Nastavte na vysokou hodnotu (např. 99999), pokud chcete, aby zůstal zapnutý po dobu celého letu. Pro větší kontrolu můžete také používat typy spouště Latch ON/OFF v pravidlech akcí.
Jakmile je vše připojeno, neváhejte kliknout na tlačítko testu, abyste zkontrolovali, že to funguje, a ujistili jste se, že pozice, které jste nastavili, jsou pro vaše potřeby správné.
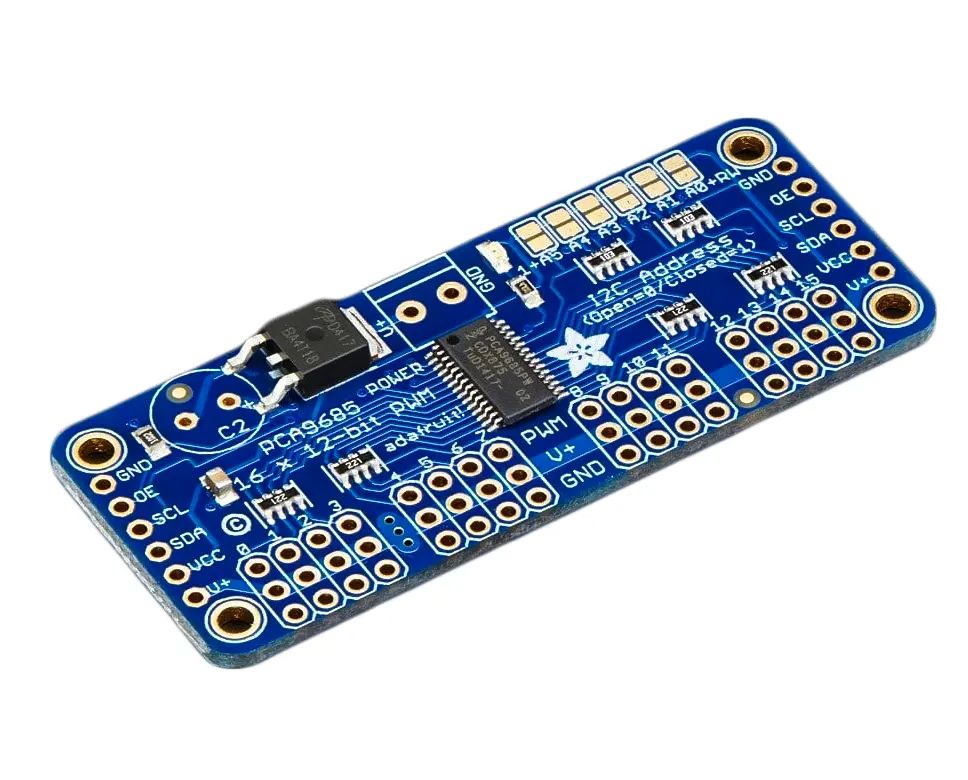
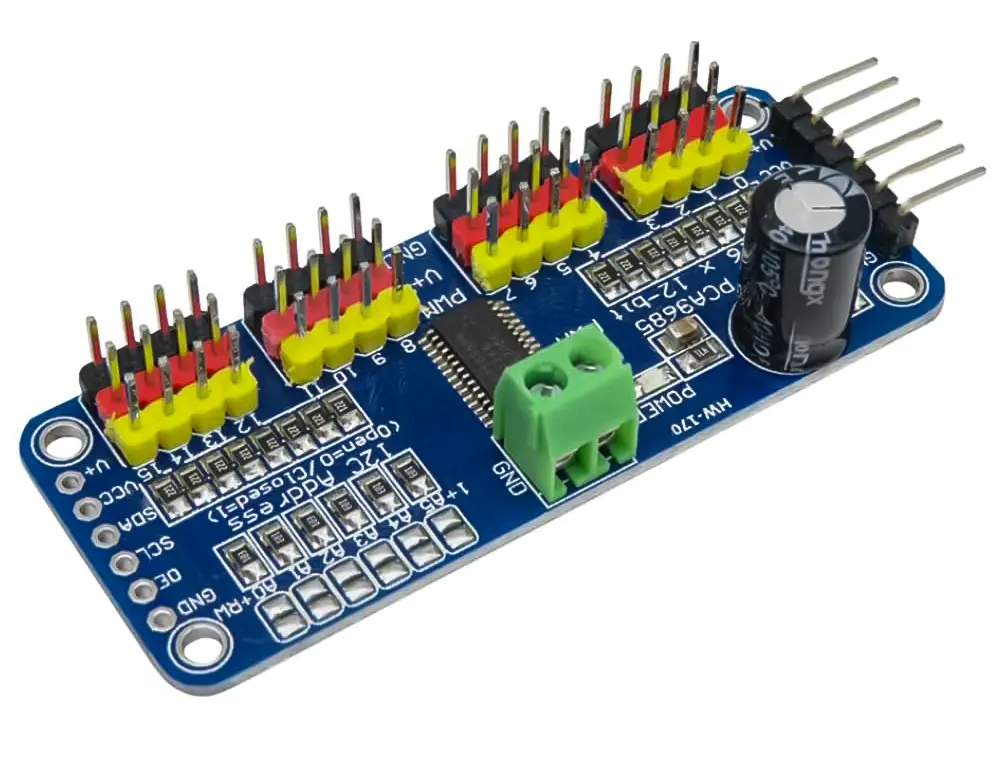
Možnost 2: Expanzní deska I2C PCA9685
Pokud si nechcete pájet do Mercury, nebo potřebujete více než 2 kanály servomotoru, můžete použít externí desku servomotoru I2C. Mercury je kompatibilní s deskami na bázi PCA9685, které jsou široce dostupné a levné. S Mercury můžete používat prvních 6 kanálů servomotoru a konfigurovat je v nastavení. Vyžaduje firmware 2.0 nebo novější.
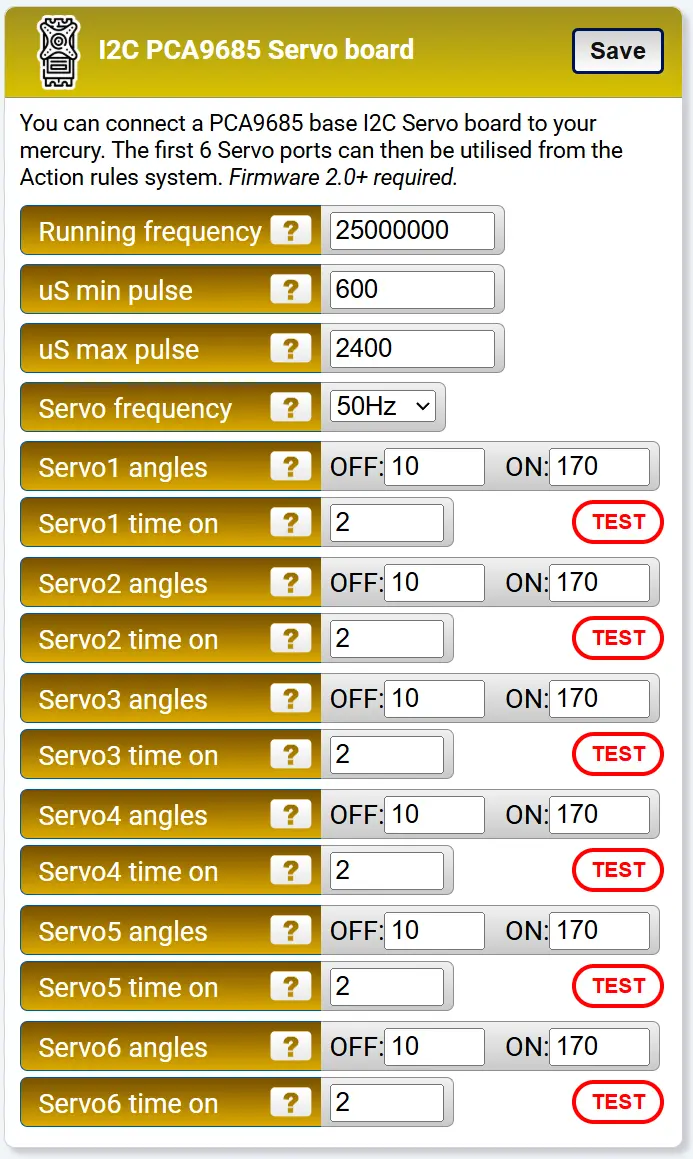
Blok konfigurace pro desky servomotoru I2C
Nastavení desky
Running frequency — PCA9685 má interní oscilátor, který může běžet od 23 do 27 MHz. Výchozí hodnota 25 MHz je přesně uprostřed a dobře funguje pro většinu desek. Tuto frekvenci můžete doladit, pokud změříte skutečnou rychlost oscilátoru vaší desky, ačkoli to není nezbytné.
Min pulse (µS) — minimální šířka pulzu signálu servomotoru. Všechny servomotory na desce I2C sdílí toto nastavení, takže musí mít stejné specifikace.
Max pulse (µS) — maximální šířka pulzu signálu servomotoru. Sdíleno všemi kanály jako minimální pulse.
Servo frequency — frekvence PWM pro všechny kanály. Možnosti jsou 50Hz (výchozí), 200Hz, 333Hz a 560Hz. Všechny servomotory na desce běží se stejnou frekvencí.
Externí hodiny CMOS
Ext clock — interní oscilátor PCA9685 není zcela přesný. Pokud má vaše deska externí oscilátor CMOS připojený na pin EXTCLK, můžete přejít na jeho používání pro přesnější a stabilnější časování servomotoru. Nastavte na "External CMOS" a upravte výše uvedenou frekvenci běhu tak, aby odpovídala vašemu vnějšímu oscilátoru (např. 25000000 pro oscilátor 25 MHz). Ponechte na "Internal (default)", pokud vaše deska nemá vnější hodiny.
Úhly pro jednotlivé kanály
Každý z 6 kanálů servomotoru má vlastní nastavení úhlů OFF a ON, stejně jako pájecí plošky GP. Nastavte úhel OFF na klidovou polohu a úhel ON na aktivní polohu. Systém pravidel akcí pak kontroluje, která servomotora jsou spuštěna a kdy, pomocí akcí I2C Servo #1 až #6.
Doporučené desky
Testovali jsme následující dvě desky.
Deska Amazon PCA9685 — £5.99 (v době psaní)
Tato levná deska funguje dobře a je skvělou variantou pro rozpočet.
Deska Adafruit PCA9685 — £14.40 (v době psaní)
Verze známé značky elektroniky s dobrou dokumentací.