Het is mogelijk om servo's aan te sluiten op de Mercury-altimeter en deze in te zetten voor allerlei functies van uw modelraket, zoals het uitbreiden van luchtremmen, het activeren van terugkeersets, het regelen van vinhoeken of het loslaten van nuttige lasten.
Het configuratieproces is opgedeeld in twee stappen. Eerst configureert u uw servo's, inclusief de hoek bij UIT en AAN en hoe ver de servo moet bewegen wanneer deze wordt geactiveerd. Vervolgens gebruikt u het action rules-systeem om in te stellen wanneer u uw servo's wilt activeren op basis van vluchtomstandigheden.
U kunt twee servo's rechtstreeks aansluiten via de GP6- en GP7-soldeerpadden op de Mercury PCB, of u kunt een extern I2C-expansiebord gebruiken voor maximaal 6 kanalen. Elk I2C-bord met een PCA9685-chip zou moeten werken met uw Mercury-altimeter.
Optie 1: GP6- en GP7-soldeerpadden
De Mercury beschikt over twee universele soldeerpads (GP6 en GP7) die elk onafhankelijk kunnen worden geconfigureerd als standaard HIGH/LOW-uitgang of als servo-signaaluitgang. Vereist firmware 2.0 of hoger.
Bij gebruik van de soldeerpads geven deze het servosignaal uit zoals geconfigureerd. U moet de Ground (GND) van de Mercury aansluiten op de voeding van uw servo opdat dit correct werkt.
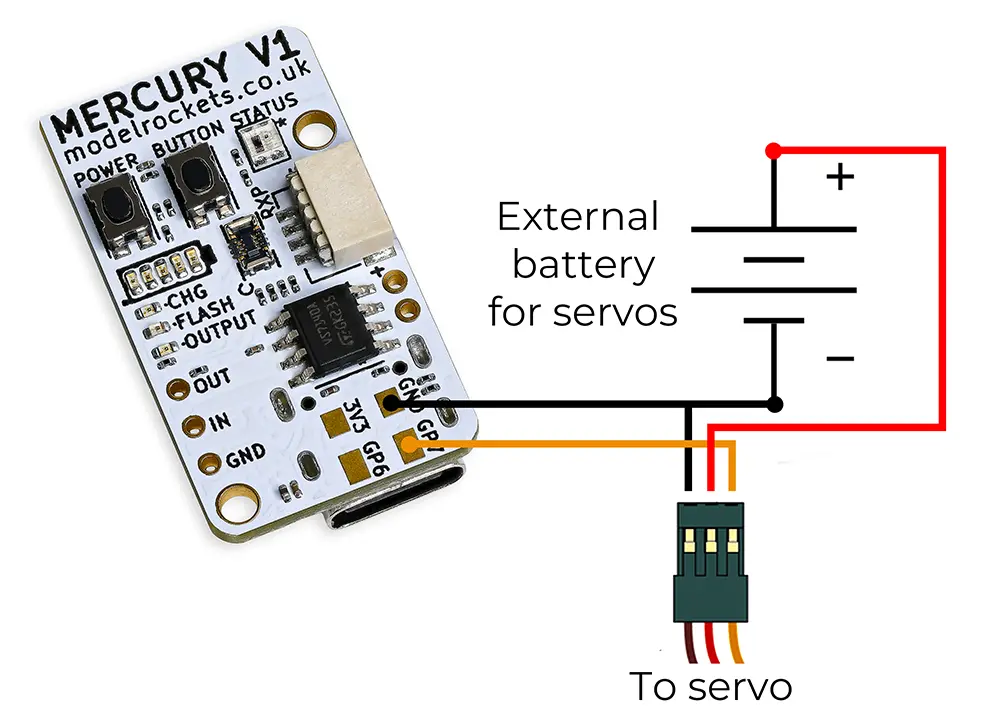
Voorbeeld van bedrading voor het GP7-solderpad
De modus instellen
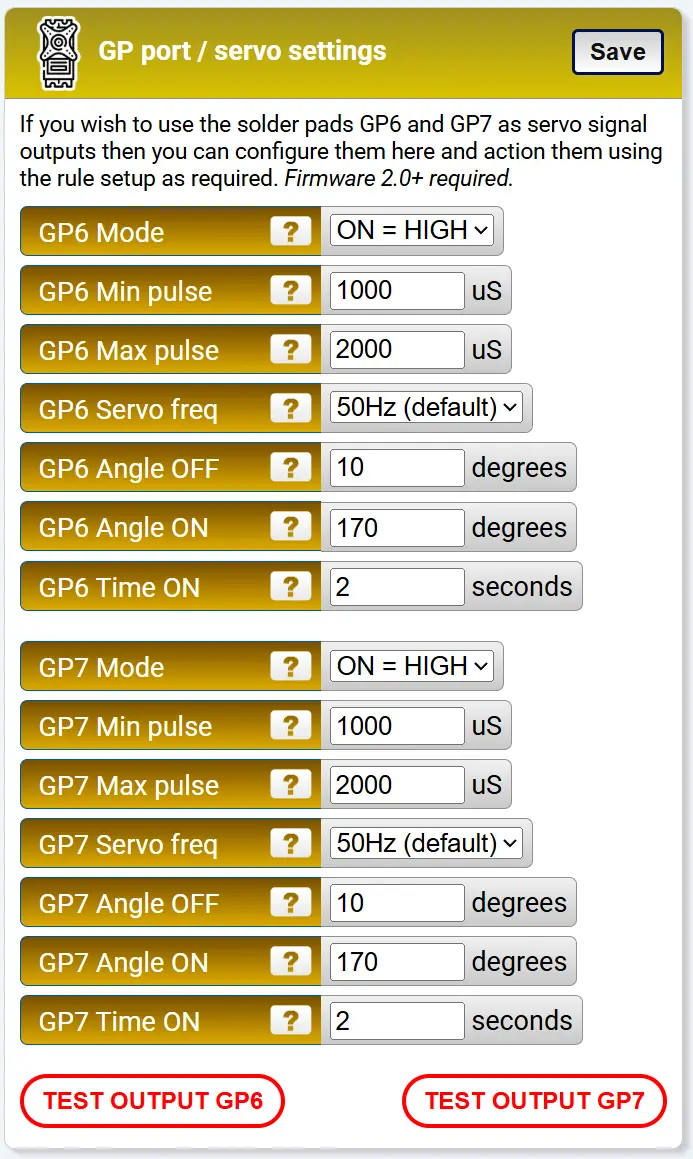
De GP-poortinstellingen op de instellingenpagina

Wijzig de modus voor elk pad dat u wilt gebruiken naar SERVO
Elk pad heeft drie modusopties:
- ON = HIGH — standaarduitgang, gaat naar hoog (3,3V) wanneer deze wordt geactiveerd
- ON = LOW — standaarduitgang, gaat naar laag (0V) wanneer deze wordt geactiveerd
- SERVO — voert een PWM-servosignaal uit wanneer deze wordt geactiveerd
De servo configureren
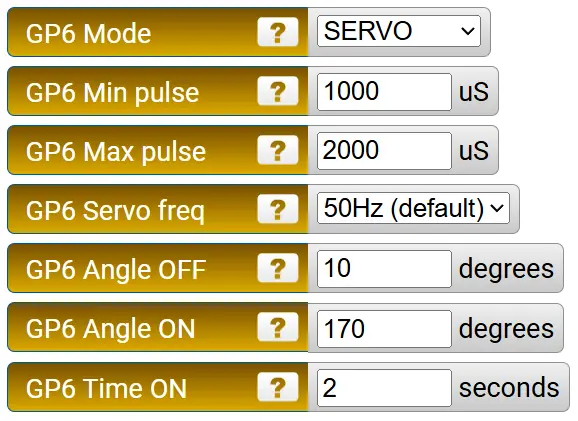
De servo-instellingen voor elk GP-kanaal
Zodra de modus op SERVO is ingesteld, verschijnen de volgende instellingen voor elk kanaal:
Min pulse (µS) — de minimale breedte van de servosignaalpuls. Raadpleeg het datasheet van uw servo voor deze waarde. De standaardwaarde werkt voor de meeste standaard servo's.
Max pulse (µS) — de maximale breedte van de servosignaalpuls. Raadpleeg ook hier het datasheet van uw servo indien nodig.
Servo frequency — de meeste standaard servo's werken op 50Hz, hoewel snellere servo's beschikbaar zijn. De opties zijn 50Hz (standaard), 200Hz, 333Hz en 560Hz. Elk GP-kanaal kan zijn eigen frequentie hebben.
Angle OFF — de hoek waarop de servo gaat wanneer deze niet wordt geactiveerd door een regel. Dit is de rustpositie.
Angle ON — de hoek waarop de servo gaat wanneer deze wordt geactiveerd door een regel. Dit is de actieve positie.
Time ON — hoe lang de servo in de AAN-hoek moet blijven wanneer deze wordt geactiveerd, in seconden. Stel dit in op een hoge waarde (bijv. 99999) als u wilt dat deze de hele vlucht aan blijft. U kunt ook de triggertypen Latch ON/OFF in de action rules gebruiken voor meer controle.
Klik gerust op de testknop zodra alles is aangesloten om te controleren of het werkt en of de ingestelde posities geschikt zijn voor uw behoeften.
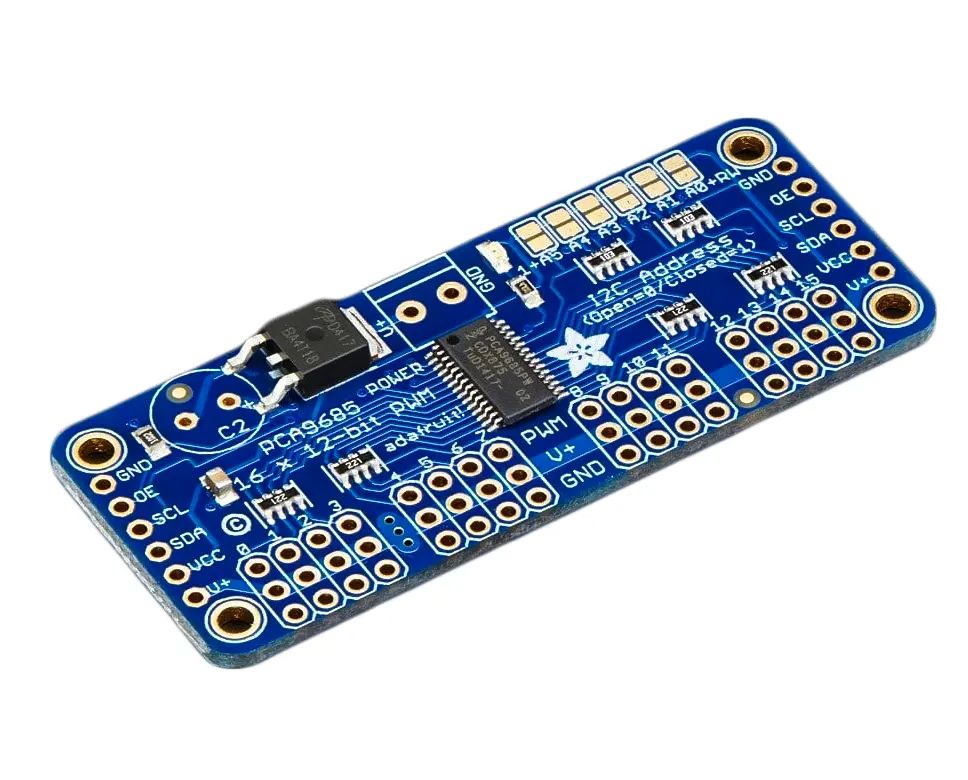
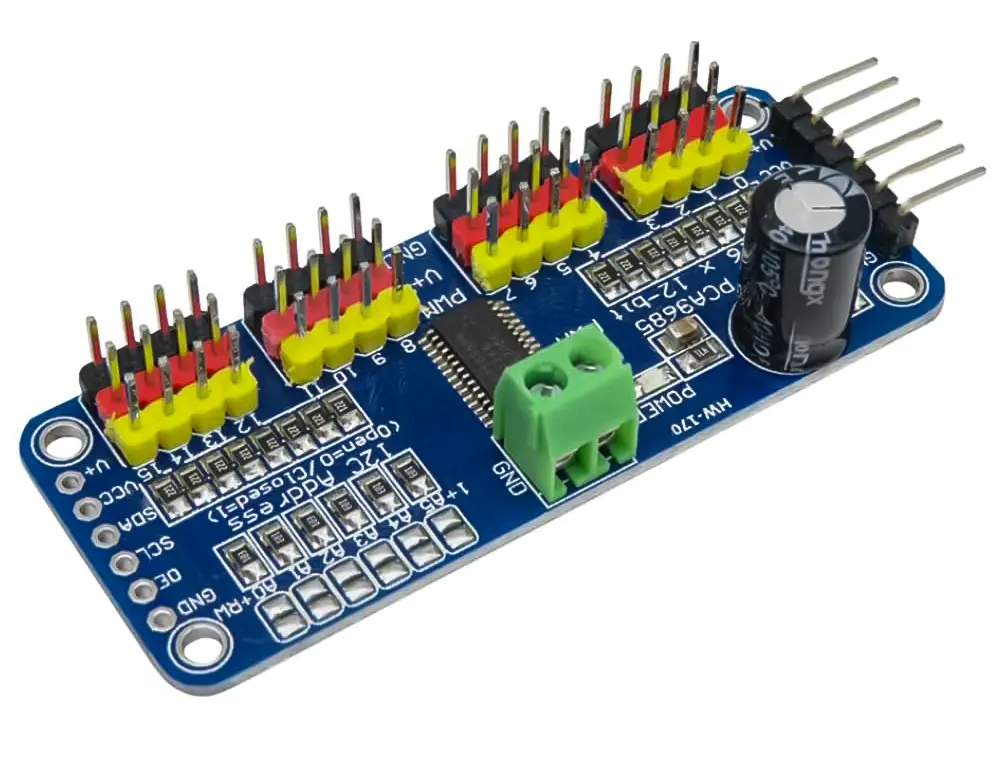
Optie 2: I2C PCA9685-expansiebord
Als u niet naar uw Mercury wilt solderen of meer dan 2 servokanalen nodig hebt, kunt u een extern I2C-servobord gebruiken. De Mercury is compatibel met op PCA9685 gebaseerde borden, die algemeen beschikbaar en goedkoop zijn. U kunt de eerste 6 servokanalen met uw Mercury gebruiken en deze in de instellingen configureren. Vereist firmware 2.0 of hoger.
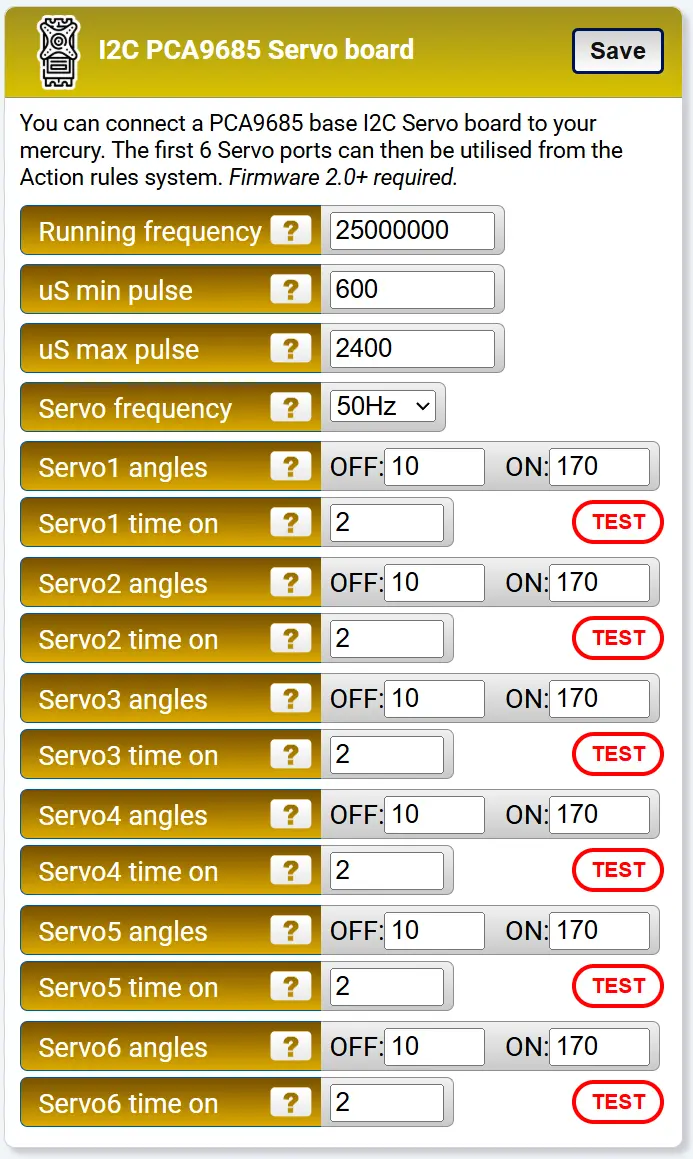
Het configuratieblok voor I2C-servoborden
Bordinstellingen
Running frequency — de PCA9685 heeft een interne oscillator die kan lopen van 23 tot 27 MHz. De standaard van 25 MHz ligt precies in het midden en werkt goed voor de meeste borden. U kunt deze frequentie fijn afstemmen als u de werkelijke oscillatorsnelheid van uw bord meet, hoewel dit niet essentieel is.
Min pulse (µS) — de minimale servosignaalpluspulsbreedte. Alle servo's op het I2C-bord delen deze instelling, dus zij moeten dezelfde specificatie hebben.
Max pulse (µS) — de maximale servosignaalpluspulsbreedte. Gedeeld via alle kanalen zoals de minimale puls.
Servo frequency — de PWM-frequentie voor alle kanalen. Opties zijn 50Hz (standaard), 200Hz, 333Hz en 560Hz. Alle servo's op het bord draaien op dezelfde frequentie.
Externe CMOS-klok
Ext clock — de interne oscillator van de PCA9685 is niet geheel nauwkeurig. Als uw bord een externe CMOS-oscillator heeft aangesloten op de EXTCLK-pin, kunt u overschakelen naar het gebruik hiervan voor nauwkeurigere en stabielere servotemporisering. Stel dit in op "External CMOS" en pas de runfrequentie hierboven aan zodat deze overeenkomt met uw externe oscillator (bijv. 25000000 voor een 25 MHz oscillator). Laat op "Internal (default)" staan als uw bord geen externe klok heeft.
Hoeken per kanaal
Elk van de 6 servokanalen heeft zijn eigen UIT- en AAN-hoek instellingen, net als de GP-pads. Stel de UIT-hoek in op uw rustpositie en de AAN-hoek op de actieve positie. Het action rules-systeem bepaalt dan welke servo's worden geactiveerd en wanneer, met behulp van de I2C Servo #1 tot #6 acties.
Aanbevolen borden
We hebben de volgende twee borden getest.
Amazon PCA9685-bord — £5,99 (op het moment van schrijven)
Dit voordelige bord werkt goed en is een geweldige budgetoptie.
Adafruit PCA9685-bord — £14,40 (op het moment van schrijven)
Een versie van een bekende elektronica-fabrikant met goede documentatie.