Il est possible de connecter des servos à l'altimètre Mercury et de les utiliser pour effectuer toutes sortes de fonctions avec votre fusée de modélisme, telles que le déploiement des aérofreins, le déclenchement des systèmes de récupération, le contrôle des angles des ailettes ou la libération de charges utiles.
Le processus de configuration se divise en deux étapes. D'abord, vous configurez vos servos, notamment l'angle à l'arrêt (OFF) et en fonctionnement (ON), ainsi que la distance de déplacement du servo au déclenchement. Ensuite, vous utilisez le système de règles d'action pour configurer le moment de déclenchement de vos servos en fonction des conditions de vol.
Vous pouvez connecter deux servos directement en utilisant les pastilles de soudure GP6 et GP7 sur le PCB du Mercury, ou utiliser une carte d'extension I2C externe pour jusqu'à 6 canaux. Toute carte I2C avec une puce PCA9685 devrait fonctionner avec votre altimètre Mercury.
Option 1 : Pastilles de soudure GP6 et GP7
Le Mercury dispose de deux pastilles de soudure à usage général (GP6 et GP7) qui peuvent chacune être configurées indépendamment en tant que sortie HIGH/LOW standard ou sortie de signal servo. Nécessite le firmware 2.0 ou ultérieur.
Lors de l'utilisation des pastilles de soudure, celles-ci produiront le signal servo tel que configuré. Vous devrez connecter la terre (GND) du Mercury à l'alimentation de votre servo pour que cela fonctionne correctement.
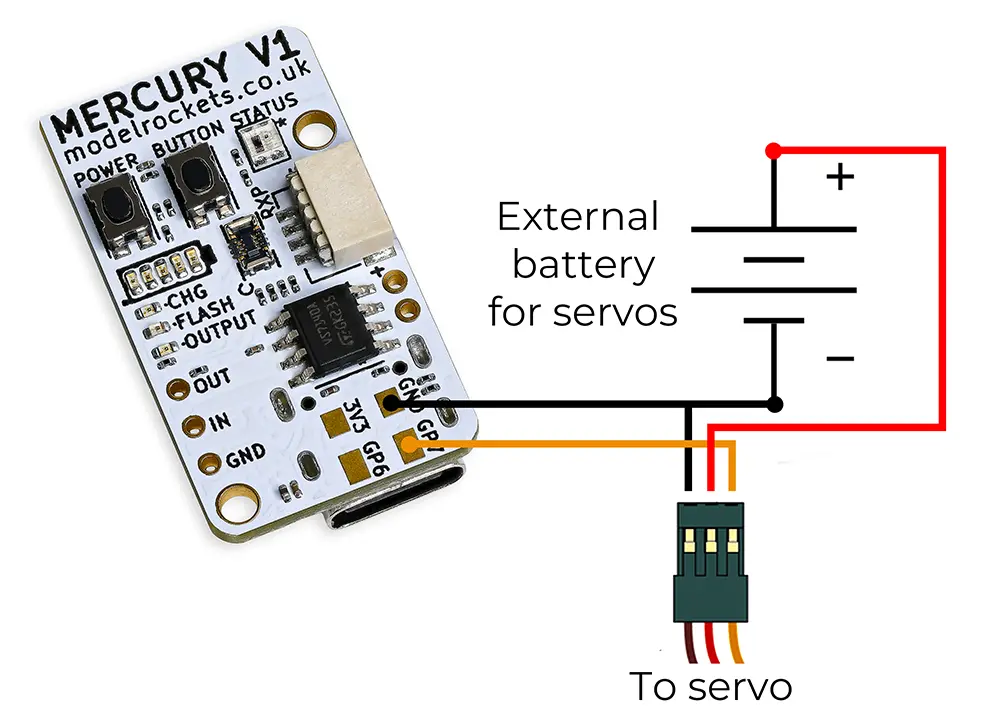
Exemple de câblage pour la pastille de soudure GP7
Configuration du mode
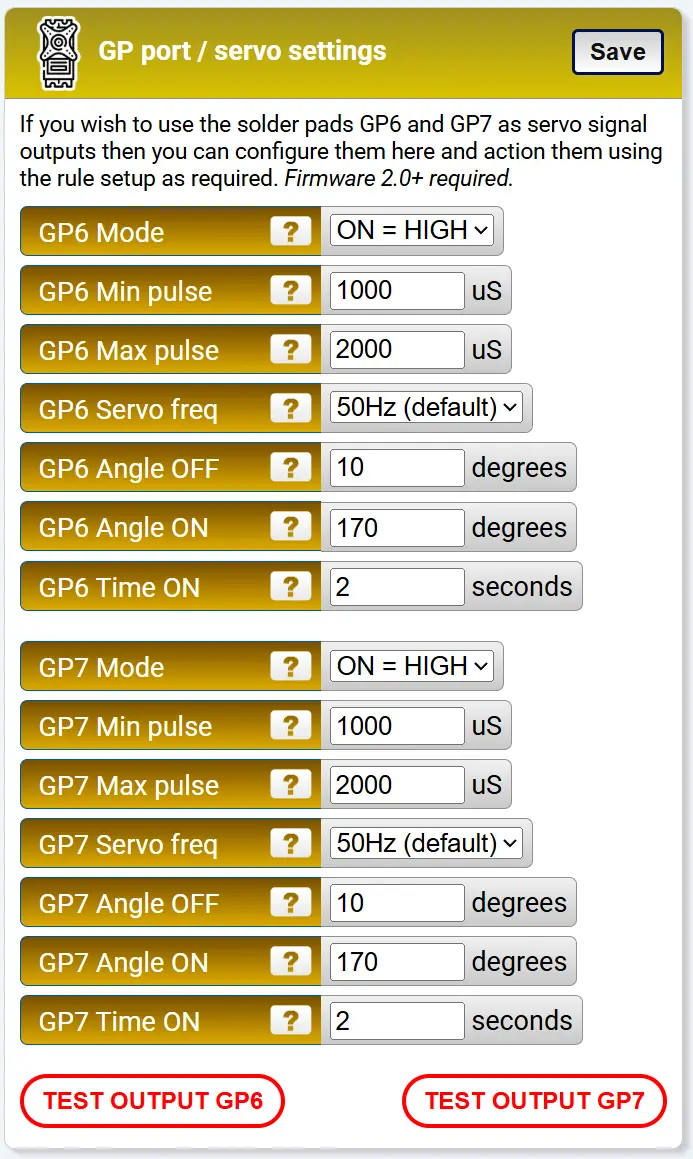
Les paramètres de port GP sur la page de paramètres

Changez le Mode de chaque pastille que vous souhaitez utiliser en SERVO
Chaque pastille dispose de trois options de mode :
- ON = HIGH — sortie standard, passe à l'état haut (3,3V) au déclenchement
- ON = LOW — sortie standard, passe à l'état bas (0V) au déclenchement
- SERVO — produit un signal servo PWM au déclenchement
Configuration du servo
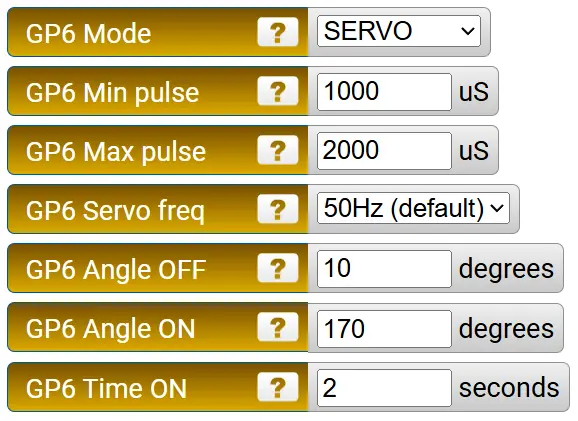
Les paramètres servo pour chaque canal GP
Une fois le mode défini sur SERVO, les paramètres suivants s'affichent pour chaque canal :
Impulsion minimale (µS) — la largeur minimale de l'impulsion du signal servo. Consultez la fiche technique de votre servo pour cette valeur. La valeur par défaut convient à la plupart des servos standard.
Impulsion maximale (µS) — la largeur maximale de l'impulsion du signal servo. Consultez à nouveau la fiche technique de votre servo si nécessaire.
Fréquence servo — la plupart des servos standard fonctionnent à 50Hz, bien que des servos plus rapides soient disponibles. Les options sont 50Hz (par défaut), 200Hz, 333Hz et 560Hz. Chaque canal GP peut avoir sa propre fréquence.
Angle OFF — l'angle vers lequel se déplace le servo lorsqu'il n'est pas déclenché par une règle. C'est la position de repos.
Angle ON — l'angle vers lequel se déplace le servo lorsqu'il est déclenché par une règle. C'est la position active.
Durée ON — combien de temps le servo doit rester à l'angle ON au déclenchement, en secondes. Définissez cette valeur sur une valeur élevée (par exemple 99999) si vous souhaitez qu'il reste activé pendant tout le vol. Vous pouvez également utiliser les types de déclenchement Latch ON/OFF dans les règles d'action pour plus de contrôle.
N'hésitez pas à cliquer sur le bouton de test une fois que tout est connecté pour vérifier le fonctionnement et voir si les positions que vous avez définies conviennent à vos besoins.
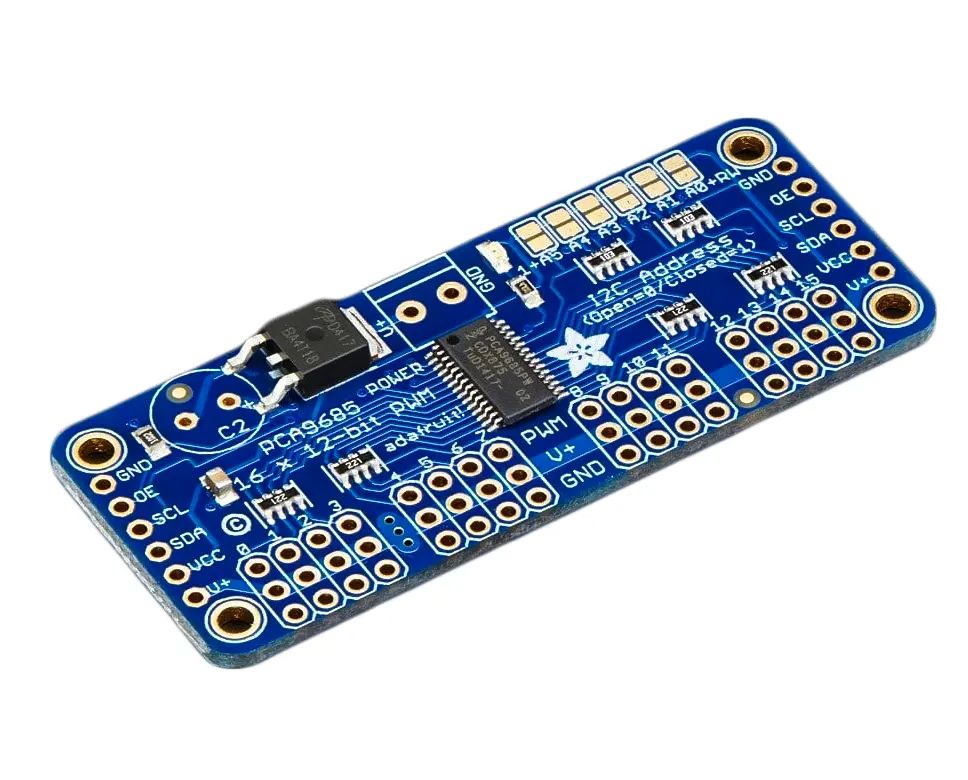
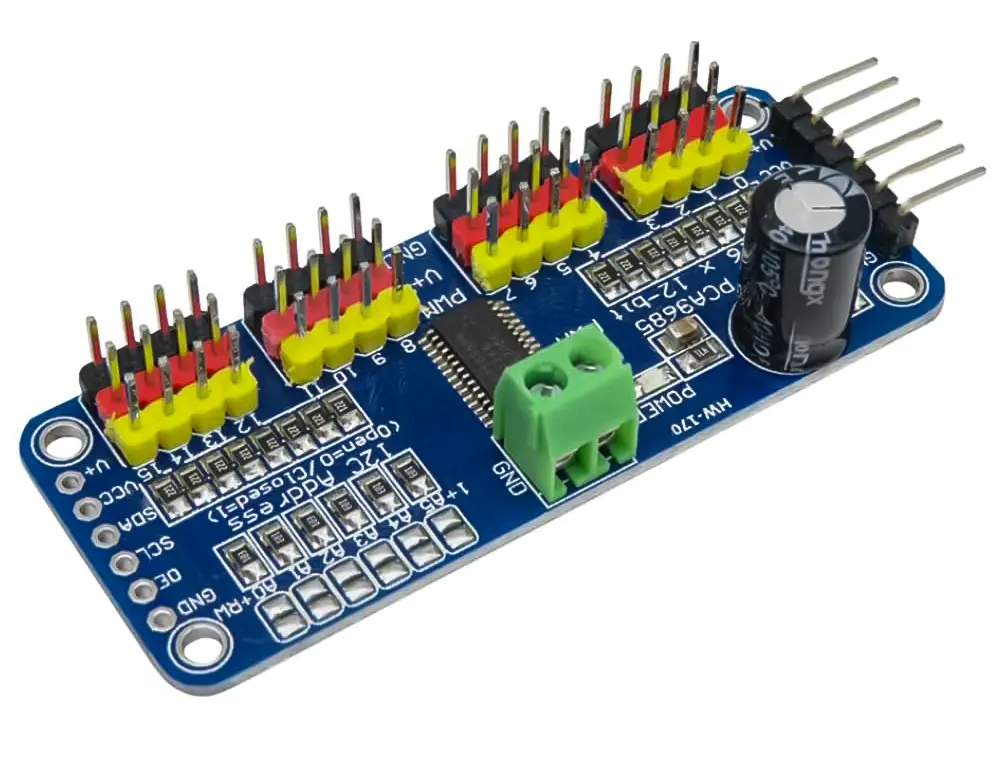
Option 2 : Carte d'expansion I2C PCA9685
Si vous ne voulez pas souder votre Mercury ou si vous avez besoin de plus de 2 canaux servo, vous pouvez utiliser une carte servo I2C externe. Le Mercury est compatible avec les cartes basées sur le PCA9685, qui sont largement disponibles et bon marché. Vous pouvez utiliser les 6 premiers canaux servo avec votre Mercury et les configurer dans les paramètres. Nécessite le firmware 2.0 ou ultérieur.
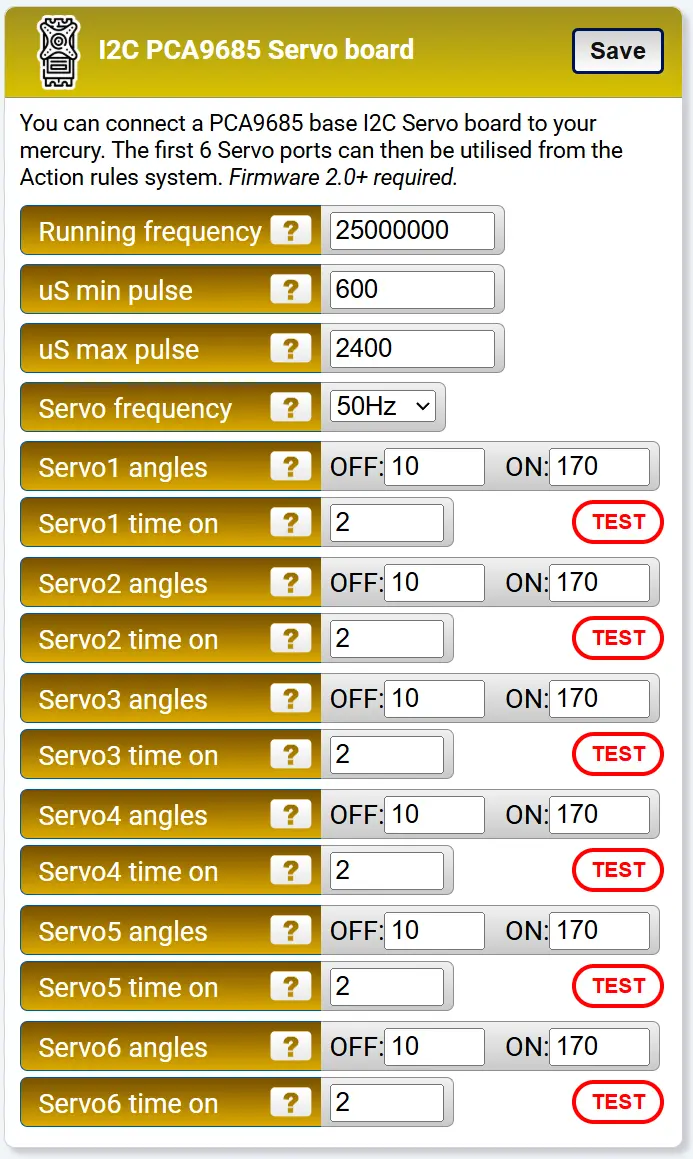
Le bloc de configuration pour les cartes servo I2C
Paramètres de la carte
Fréquence d'exécution — le PCA9685 dispose d'un oscillateur interne qui peut fonctionner de 23 à 27 MHz. La valeur par défaut de 25 MHz se situe au milieu et convient bien à la plupart des cartes. Vous pouvez affiner cette fréquence si vous mesurez la vitesse réelle de l'oscillateur de votre carte, bien que ce ne soit pas essentiel.
Impulsion minimale (µS) — la largeur minimale de l'impulsion du signal servo. Tous les servos de la carte I2C partagent ce paramètre, ils doivent donc avoir la même spécification.
Impulsion maximale (µS) — la largeur maximale de l'impulsion du signal servo. Partagée entre tous les canaux comme l'impulsion minimale.
Fréquence servo — la fréquence PWM pour tous les canaux. Les options sont 50Hz (par défaut), 200Hz, 333Hz et 560Hz. Tous les servos de la carte fonctionnent à la même fréquence.
Horloge CMOS externe
Horloge ext — l'oscillateur interne du PCA9685 n'est pas entièrement précis. Si votre carte dispose d'un oscillateur CMOS externe connecté à la broche EXTCLK, vous pouvez basculer vers son utilisation pour un fonctionnement du servo plus précis et stable. Réglez cette option sur « CMOS externe » et ajustez la fréquence d'exécution ci-dessus pour correspondre à votre oscillateur externe (par exemple 25000000 pour un oscillateur 25 MHz). Laissez sur « Interne (par défaut) » si votre carte n'a pas d'horloge externe installée.
Angles par canal
Chacun des 6 canaux servo dispose de ses propres paramètres d'angle OFF et ON, tout comme les pastilles GP. Réglez l'angle OFF sur votre position de repos et l'angle ON sur la position active. Le système de règles d'action contrôle alors quels servos sont déclenchés et quand, en utilisant les actions I2C Servo #1 à #6.
Cartes recommandées
Nous avons testé les deux cartes suivantes.
Carte PCA9685 Amazon — £5,99 (au moment de la rédaction)
Cette carte peu coûteuse fonctionne bien et constitue une excellente option économique.
Carte PCA9685 Adafruit — £14,40 (au moment de la rédaction)
Une version d'une marque d'électronique bien connue avec une bonne documentation.