Es posible conectar servos al altímetro Mercury y usarlos para realizar todo tipo de funciones con tu cohete modelo, como desplegar air brakes, activar sistemas de recuperación, controlar ángulos de aletas o liberar cargas útiles.
El proceso de configuración se divide en dos pasos. Primero, configuras tus servos incluyendo el ángulo cuando están APAGADOS y ENCENDIDOS y cuánto debe moverse el servo cuando se activa. Segundo, utilizas el sistema de reglas de acción para configurar cuándo activar tus servos basándote en las condiciones de vuelo.
Puedes conectar dos servos directamente usando los pads de soldadura GP6 y GP7 en la PCB del Mercury, o utilizar una placa de expansión I2C externa para hasta 6 canales. Cualquier placa I2C con un chip PCA9685 debería funcionar con tu altímetro Mercury.
Opción 1: Pads de soldadura GP6 y GP7
El Mercury tiene dos pads de soldadura de propósito general (GP6 y GP7) que pueden configurarse independientemente como salida estándar HIGH/LOW o como salida de señal servo. Requiere firmware 2.0 o posterior.
Al usar los pads de soldadura, estos generarán la señal servo según se configure. Necesitarás conectar la Tierra (GND) del Mercury a la fuente de alimentación de tu servo para que esto funcione correctamente.
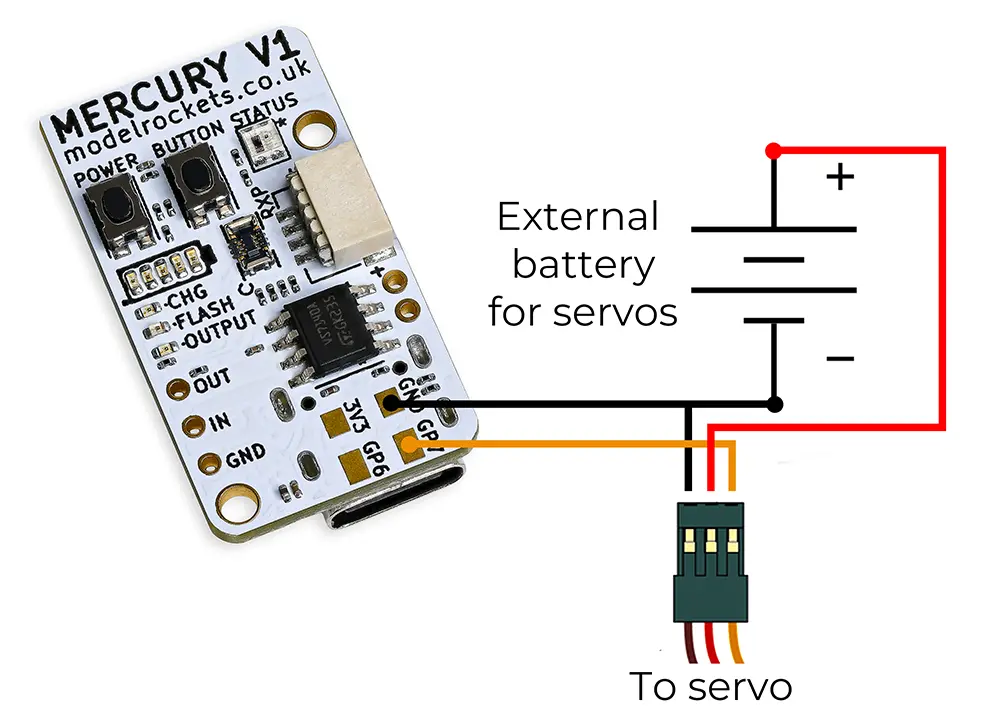
Ejemplo de cableado para el pad de soldadura GP7
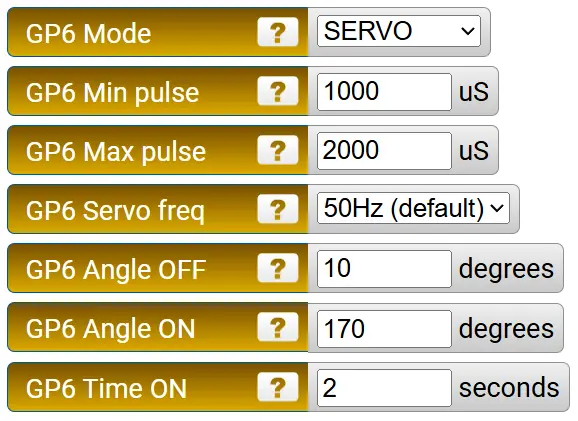
Configurar el modo
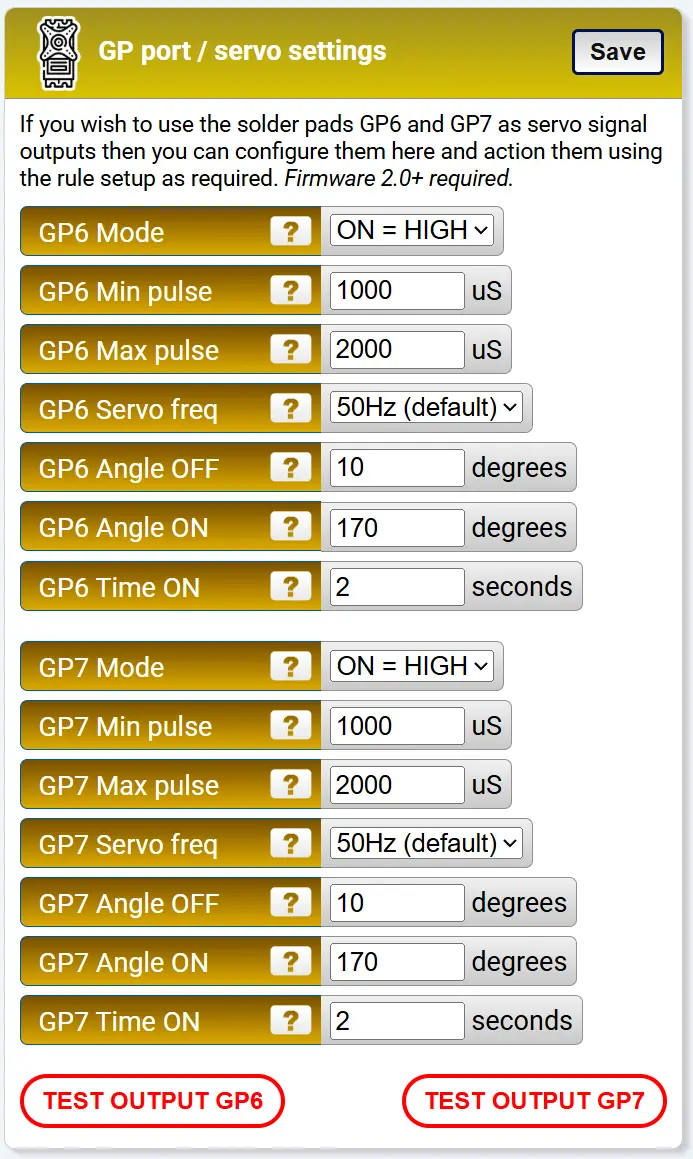
Configuración del puerto GP en la página de ajustes

Cambia el Modo para cada pad que desees usar a SERVO
Cada pad tiene tres opciones de modo:
- ON = HIGH — salida estándar, se pone en alto (3.3V) cuando se activa
- ON = LOW — salida estándar, se pone en bajo (0V) cuando se activa
- SERVO — genera una señal PWM servo cuando se activa
Configurar el servo
Configuración del servo para cada canal GP
Una vez que el modo está configurado a SERVO, aparecen los siguientes ajustes para cada canal:
Pulso mínimo (µS) — el ancho mínimo del pulso de la señal servo. Consulta la hoja de especificaciones de tu servo para este valor. El valor predeterminado funciona para la mayoría de servos estándar.
Pulso máximo (µS) — el ancho máximo del pulso de la señal servo. De nuevo, consulta la hoja de especificaciones de tu servo si es necesario.
Frecuencia del servo — la mayoría de servos estándar funcionan a 50Hz, aunque hay servos más rápidos disponibles. Las opciones son 50Hz (predeterminado), 200Hz, 333Hz y 560Hz. Cada canal GP puede tener su propia frecuencia.
Ángulo APAGADO — el ángulo al que se mueve el servo cuando no está siendo activado por una regla. Esta es la posición de reposo.
Ángulo ENCENDIDO — el ángulo al que se mueve el servo cuando se activa por una regla. Esta es la posición activa.
Tiempo ENCENDIDO — cuánto tiempo debe permanecer el servo en el ángulo ENCENDIDO cuando se activa, en segundos. Establece este valor a un número alto (por ejemplo 99999) si deseas que permanezca activado durante todo el vuelo. También puedes usar los tipos de activación Latch ON/OFF en las reglas de acción para mayor control.
Siéntete libre de hacer clic en el botón de prueba una vez que todo esté conectado para verificar que funciona y ver si las posiciones que has establecido son las correctas para tus necesidades.
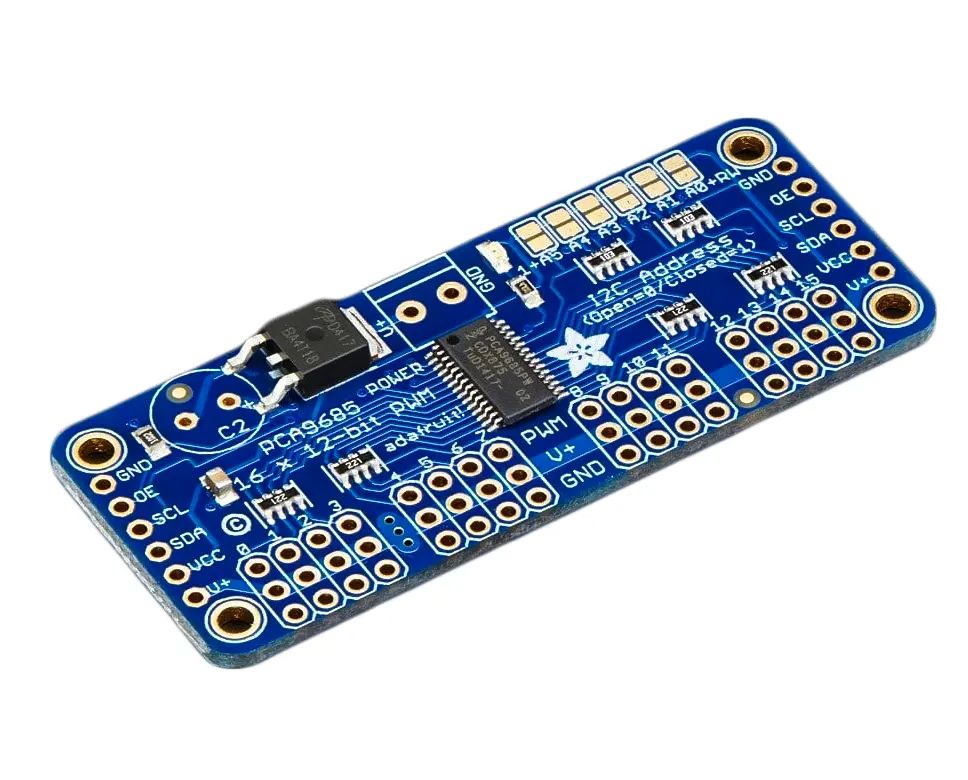
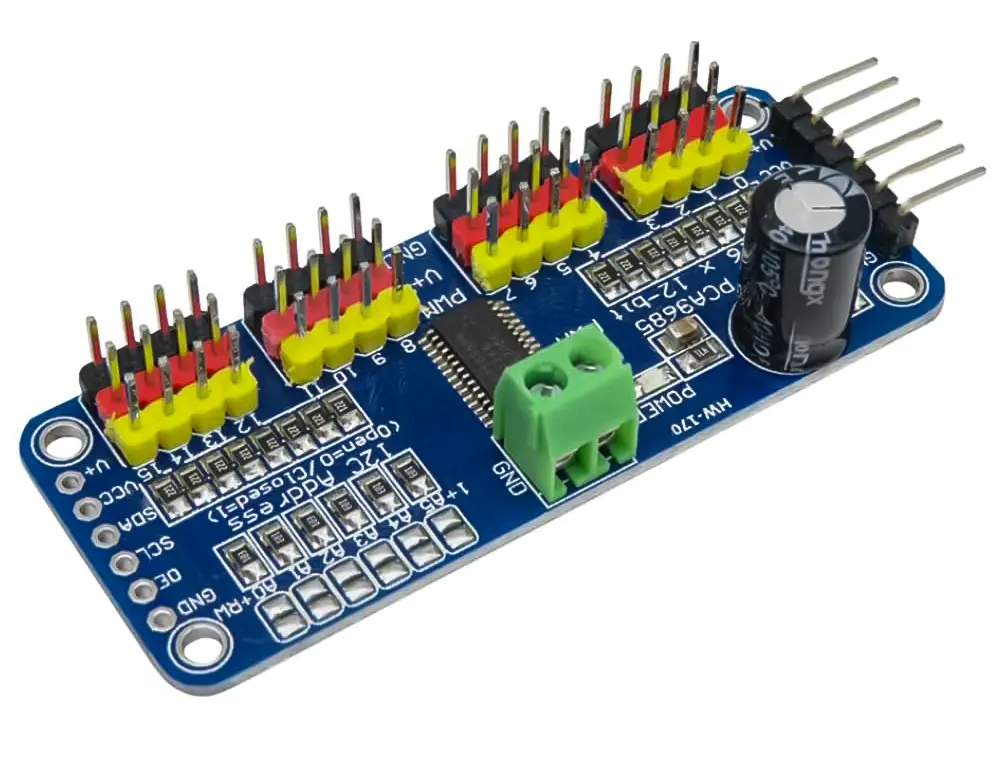
Opción 2: Placa de expansión I2C PCA9685
Si no deseas soldar en tu Mercury, o necesitas más de 2 canales servo, puedes usar una placa servo I2C externa. El Mercury es compatible con placas basadas en PCA9685, que están ampliamente disponibles y son económicas. Puedes usar los primeros 6 canales servo con tu Mercury y configurarlos en los ajustes. Requiere firmware 2.0 o posterior.
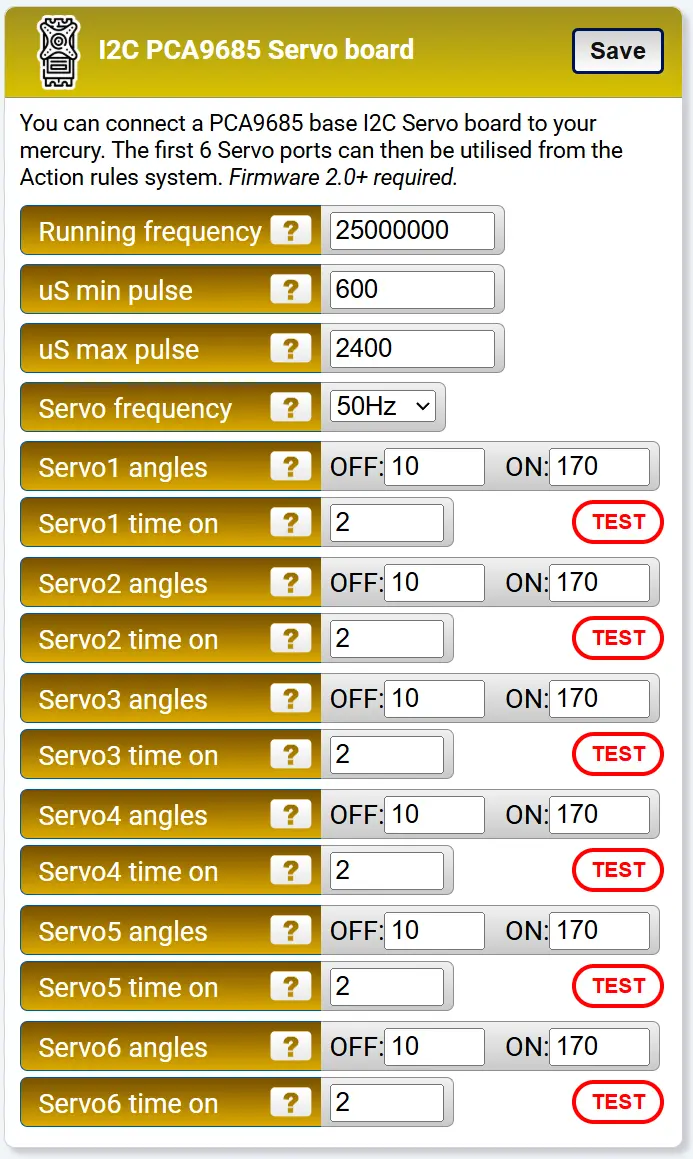
El bloque de configuración para placas servo I2C
Configuración de la placa
Frecuencia de funcionamiento — el PCA9685 tiene un oscilador interno que puede funcionar de 23 a 27 MHz. El predeterminado de 25 MHz está justo en medio y funciona bien para la mayoría de placas. Puedes ajustar esta frecuencia si mides la velocidad real del oscilador de tu placa, aunque esto no es esencial.
Pulso mínimo (µS) — el ancho mínimo del pulso de la señal servo. Todos los servos en la placa I2C comparten este ajuste, por lo que necesitan tener la misma especificación.
Pulso máximo (µS) — el ancho máximo del pulso de la señal servo. Compartido entre todos los canales como el pulso mínimo.
Frecuencia del servo — la frecuencia PWM para todos los canales. Las opciones son 50Hz (predeterminado), 200Hz, 333Hz y 560Hz. Todos los servos en la placa funcionan a la misma frecuencia.
Reloj CMOS externo
Reloj externo — el oscilador interno del PCA9685 no es completamente preciso. Si tu placa tiene un oscilador CMOS externo conectado al pin EXTCLK, puedes cambiar para usarlo con un tiempo servo más preciso y estable. Configúralo a "Reloj CMOS externo" y ajusta la frecuencia de funcionamiento anterior para que coincida con tu oscilador externo (por ejemplo 25000000 para un oscilador de 25 MHz). Déjalo en "Interno (predeterminado)" si tu placa no tiene un reloj externo instalado.
Ángulos por canal
Cada uno de los 6 canales servo tiene sus propios ajustes de ángulo APAGADO y ENCENDIDO, igual que los pads GP. Establece el ángulo APAGADO en tu posición de reposo y el ángulo ENCENDIDO en la posición activa. El sistema de reglas de acción controla entonces qué servos se activan y cuándo, usando las acciones I2C Servo #1 a #6.
Placas recomendadas
Hemos probado con las siguientes dos placas.
Placa Amazon PCA9685 — £5.99 (al momento de escribir)
Esta placa económica funciona bien y es una excelente opción presupuestaria.
Placa Adafruit PCA9685 — £14.40 (al momento de escribir)
Una versión de marca de electrónica bien conocida con buena documentación.