Altimetr Mercury może, mając zaledwie kilka zmiennych dotyczących twojej rakiety, obliczyć szacunkową apogeum podczas fazy szybowania po spaleniu się silnika. Ta prognoza działa z częstością do 100Hz i jest wyświetlana na wykresach lotu. Wymaga wersji oprogramowania 2.1 lub nowszej.
Informacje te mogą być używane w systemie reguł akcji jako warunek (przy użyciu „Predicted apogee" lub „Air brake on percent"), lub do sterowania automatycznym systemem hamulca aerodynamicznego opisanym poniżej.
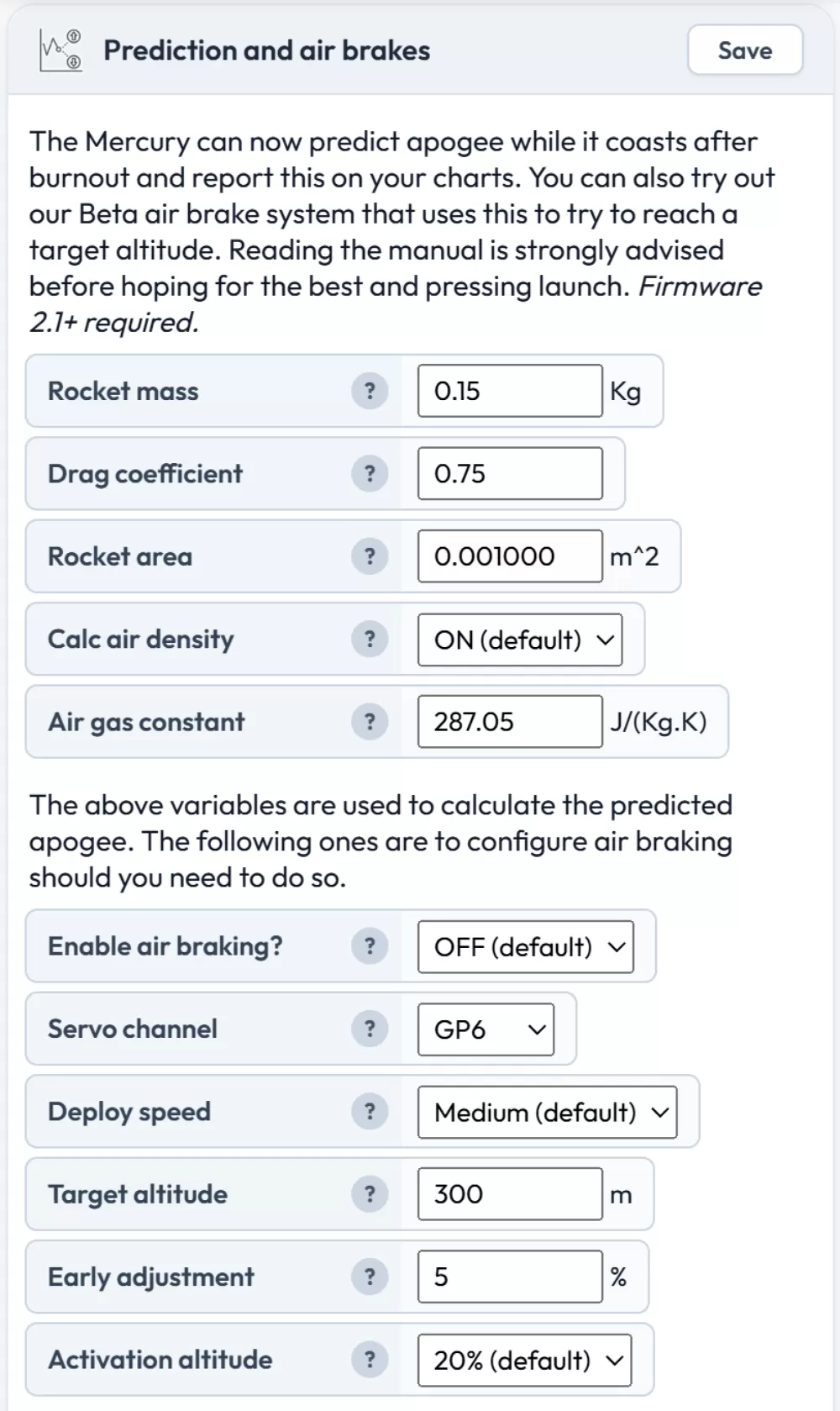
Ustawienia prognozy apogeum
Istnieje 5 ustawień dla algorytmu prognozy. Aby uzyskać dobre wyniki, musisz dokładnie wypełnić pierwsze 3 ustawienia.
Masa rakiety
To jest masa twojej rakiety po spaleniu się silnika w kilogramach. Tak więc twoja kompletna rakieta w postaci, w której będziesz ją latać, ale ze spaloną obudową silnika zamiast nowej. Aby uzyskać najdokładniejsze prognozy, chcesz uzyskać to tak blisko jak to możliwe.
Jeśli nie możesz zdobyć używaną obudowę silnika, sprawdź wagę netto paliwa silnika i odejmij to od wagi załadowanego silnika, aby uzyskać przybliżoną szacunkową wagę spalonej obudowy.
Współczynnik oporu
Dla większości rakiet wartość ta będzie między 0,4 a 0,8. Wartość 0,75 to rozsądny punkt wyjścia. Jeśli używasz oprogramowania do symulacji, takiego jak OpenRocket lub RockSim, możesz uzyskać tam dokładniejszą wartość.
Jeśli stwierdzisz w locie testowym, że szacunkowe apogeum jest znacznie wyższe niż rzeczywistość, twój współczynnik jest prawdopodobnie za niski — zwiększ go, aby obniżyć szacunek. Jeśli szacunek jest za niski, zmniejsz współczynnik, aby zwiększyć przewidywaną wysokość.
Obszar rakiety
To jest pole przekroju poprzecznego twojej rakiety widziane z góry, w metrach kwadratowych (m²). Możesz to oszacować, biorąc pole przekroju poprzecznego tuby kadłuba twojego silnika i dodając szerokość i grubość płetwy. Nie zapomnij pracować w metrach dla tej wartości.
Jako odniesienie, tuba kadłuba 38 mm ma pole przekroju poprzecznego około 0,00113 m².
Oblicz gęstość powietrza
Gdy jest włączone (domyślnie), Mercury oblicza gęstość powietrza na bieżącej wysokości rakiety podczas lotu dla najdokładniejszej prognozy. Jeśli jest wyłączone, używa statycznej średniej opartej na wysokości około 400 metrów, która powinna być w porządku, jeśli latasz poniżej 1000 metrów.
Ważne: Musisz wprowadzić dokładne prognostyczne ciśnienie dla dnia i lokalizacji, w której latasz, aby ta funkcja mogła prawidłowo obliczyć twoją wysokość nad poziomem morza. Ustaw to w ustawieniach lotu.
Stała gazowa powietrza
To jest specyficzna stała gazowa dla suchego powietrza. Wartość domyślna to 287,05 J/(kg·K). Chciałbyś rozważyć zmianę tej wartości tylko wtedy, gdy latasz w warunkach bardzo wilgotnego powietrza, i nawet wtedy różnica jest niewielka.
Konfiguracja hamulca aerodynamicznego
System hamulca aerodynamicznego używa jednego kanału serwo do sterowania wdrażaniem hamulca aerodynamicznego podczas fazy szybowania. Jeśli jest włączony, system będzie próbować doprowadzić twoją rakietę do docelowej wysokości, stopniowo wdrażając i wciągając hamulce na podstawie przewidywanego apogeum. Nadal będziesz chciał wybrać silnik, który daje ci nieco większą wysokość niż twój cel.
Mimo że używa tylko jednego kanału serwo (albo pady lutownicze GP albo zewnętrzna płytka rozszerzająca I2C), możesz połączyć sygnały drut więcej niż jednego serwo z jednym kanałem, jeśli potrzebujesz sterować wieloma serwami jednocześnie.
Uwaga: Upewnij się, że konfigurujesz wybrany kanał serwo z kątem OFF ustawionym na hamulce w pełni zamknięte i kątem ON ustawionym na w pełni wdrożone. Upewnij się również, że nie używasz tego samego kanału serwo w regułach akcji, aby uniknąć konfliktu. Instrukcje konfiguracji znajdują się na stronie konfiguracji serw.
Włącz hamowanie aerodynamiczne
Prosty przełącznik włączania/wyłączania dla systemu hamulca aerodynamicznego. Domyślnie wyłączony.
Kanał serwo
Wybierz, który kanał serwo steruje twoimi hamulcami aerodynamicznymi. Opcje to GP6, GP7 lub dowolny z 6 kanałów na płycie rozszerzającej I2C PCA9685 (I2C #1 do #6).
Szybkość wdrażania
Hamulce aerodynamiczne wdrażają się stopniowo, podczas gdy system czeka na zaktualizowane prognozy i wciągają się szybko, gdy przewidywane apogeum spada poniżej celu. To ustawienie kontroluje, jak szybko hamulce narastają do pełnego wdrożenia:
- Szybko — OFF na w pełni wdrożone w 0,5 sekundy
- Średnio (domyślnie) — OFF na w pełni wdrożone w 1 sekundę
- Wolno — OFF na w pełni wdrożone w 2 sekundy
Wysokość docelowa
Wysokość w metrach, którą chcesz osiągnąć. System będzie próbować doprowadzić przewidywane apogeum jak najbliżej tej wartości podczas fazy szybowania.
Wczesne dostosowanie
To ustawienie pomaga zapobiec usuwaniu zbyt dużej ilości energii z rakiety wcześnie w fazie szybowania, gdy tolerancje prognozy mogą przeszacować apogeum. Działa to poprzez kierowanie na nieco wyższą wysokość, aż rakieta osiągnie 85% docelowej wysokości.
Na przykład, jeśli ustawisz docelową wysokość na 1000 metrów i wczesne dostosowanie na 5%, Mercury będzie kierować się na 1050 metrów, aż rakieta osiągnie 850 metrów wysokości. Następnie przełączy się na kierowanie się na true 1000 metrów na pozostałą część szybowania. Dobre ustawienie to zazwyczaj od kilku procent do 10–20%.
Wysokość aktywacji
To jest wysokość jako procent docelowej wysokości, przy której system zacznie działać. Opcje wahają się od 10% do 80%, z 20% jako domyślnym.
Na przykład, z docelową wysokością 300 metrów i aktywacją ustawioną na 40%, system zacznie wdrażać hamulce po tym, jak rakieta przekroczy 120 metrów.
Niezależnie od tego ustawienia, hamulce aerodynamiczne nie będą działać, aż do wykrycia spalenia się, ponieważ algorytm prognozy jest dokładny tylko po spaleniu się.
Używanie danych prognozy w regułach akcji
Nawet jeśli nie używasz automatycznego systemu hamulca aerodynamicznego, przewidywane dane apogeum są dostępne jako warunek w systemie reguł akcji. Możesz użyć „Predicted apogee (m)" i „Air brake on percent (%)" jako danych warunkowych do budowania niestandardowych reguł. Na przykład, możesz uruchomić akcję tylko wtedy, gdy przewidywane apogeum przekroczy określoną wysokość, lub użyć procentu hamulca aerodynamicznego do koordynacji innych systemów.