Bei Rev4 und späteren Platinen hat der Nano einen Bewegungssensor (ein IMU), der die Neigung und Drehung während des Fluges misst. Die Kalibrierung lehrt dem Nano, wie „eben und stillstehend" für Ihre spezifische Platine aussieht, wodurch die Orientierungs- und Winkelangaben genau bleiben. Es dauert ein paar Minuten, und Sie müssen es nur einmal durchführen, obwohl Sie es jederzeit wiederholen können.
iINFO
Die Kalibrierung gilt nur für Rev4 und später Platinen, die mit dem IMU ausgestattet sind. Rev3 und früher haben keinen Bewegungssensor, daher gibt es nichts zu kalibrieren und keine Kalibrierungsdatei auf dem Laufwerk.
Verbinden Sie den Nano über USB, damit sein Laufwerk angezeigt wird, und öffnen Sie dann die Datei device_calibration.txt. Ändern Sie die 0 in der allerersten Zeile in eine 1, speichern Sie die Datei und werfen Sie das Laufwerk sicher aus. Die Kalibrierung wird beim nächsten Hochfahren des Nano ausgeführt.
Da Sie die Platine durch mehrere Positionen drehen werden, ist es am einfachsten, sie mit Batteriebetrieb auszuführen, damit kein Kabel im Weg ist: Setzen Sie das Flag auf 1, werfen Sie aus und trennen Sie die Verbindung, und schalten Sie dann den Nano ein. Die Kalibrierung beginnt sofort, anstatt sich für einen Flug vorzubereiten, und die erste Zeile wird nach dem Abschluss automatisch auf 0 zurückgesetzt. Zuerst das Gyroskop, dann das Beschleunigungsmessgerät, und die LED führt Sie durch beide.
Das Gyroskop benötigt nur, dass die Platine vollständig stillsteht. Die LED leuchtet rot auf und Sie haben ein paar Sekunden Zeit, um einen Schritt zurückzugehen, dann nimmt sie etwa zehn bis fünfzehn Sekunden lang Messwerte vor. Legen Sie den Nano auf etwas Solides, das vibrationsfrei ist, und berühren Sie ihn nicht. Am besten führen Sie dies durch, wenn der Nano in der Orientierung sitzt, in der Sie ihn fliegen möchten.
Wenn eine Bewegung erkannt wird, warnt Sie das Gerät mit einem orangefarbenen Licht. Wenn das passiert, lassen Sie es beenden und führen Sie die Kalibrierung dann erneut aus. Wenn das Gyroskop fertig ist, blinkt es dreimal grün auf und geht zum Beschleunigungsmessgerät über.
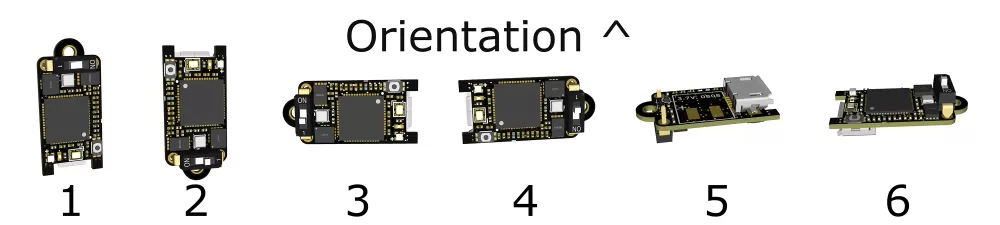
Anschließend platzieren Sie den Nano in sechs Positionen, eine für jede Seite, damit er die Schwerkraft in alle Richtungen messen kann. Es durchläuft sie immer in der gleichen Reihenfolge durch, wie unten dargestellt, daher können Sie einfach der Liste folgen. Für jede Position zeigt Ihnen die LED, wie es vorangeht:
- solange die Platine noch nicht ausgerichtet ist, zeigt die LED rot oder rosa
- sobald sie korrekt gehalten wird, leuchtet die LED ständig cyan und nimmt ihre Messwerte vor, halten Sie sie also still
- sie blinkt dann dreimal grün auf, um zu bestätigen, dass die Position erfasst ist, und geht zur nächsten über
Der Rhythmus ist daher jedes Mal gleich: Richten Sie es aus, bis das Licht cyan wird, halten Sie es still, bis das Grün blinkt, und gehen Sie zur nächsten Position über. Es gibt dazwischen keine Eile.
- Flach liegend, Komponenten nach oben (Orientierung 5)
- Flach liegend, Komponenten nach unten (Orientierung 6)
- Auf der Seite, Micro-USB nach rechts (Orientierung 3)
- Auf der Seite, Micro-USB nach links (Orientierung 4)
- Aufrecht stehend, Micro-USB unten (Orientierung 1)
- Aufrecht stehend, Micro-USB oben (Orientierung 2)
Sobald alle sechs Positionen erfasst sind, blinkt der Nano fünfmal blau auf und startet sich selbst neu, sein Laufwerk wird also verschwinden und wiedererscheinen, wenn es angesteckt ist. Das ist alles. Die Kalibrierungswerte werden im eigenen Speicher des Nano gespeichert und bleiben dort über Stromzyklen und Firmware-Updates hinweg erhalten.
Um zu bestätigen, dass es funktioniert hat, öffnen Sie device_information.html und überprüfen Sie, ob die Kalibrierungszeile Calibrated (Kalibriert) lautet, oder öffnen Sie device_calibration.txt erneut, die nun die gemessenen Offsets auflistet und die erste Zeile auf 0 zurückgesetzt hat.
iGUT ZU WISSEN
Sie müssen nur einmal kalibrieren. Es lohnt sich, dies zu wiederholen, wenn die Platine einen harten Aufprall erlitten hat, oder wenn Ihre Flugdaten beginnen, Neigungs- oder Orientierungsangaben zu zeigen, die fehlerhaft aussehen.