Sur les cartes Rev4 et ultérieures, le Nano dispose d'un capteur de mouvement (une centrale inertielle) qui mesure l'inclinaison et la rotation pendant le vol. L'étalonnage lui enseigne ce que « niveau et immobile » signifie pour votre carte particulière, ce qui maintient la précision des données d'orientation et d'angle. Cela prend quelques minutes, et vous ne devez le faire qu'une fois, bien que vous puissiez le répéter à tout moment.
iINFO
L'étalonnage ne s'applique qu'aux cartes Rev4 et ultérieures, celles équipées de la centrale inertielle. Les Rev3 et antérieures n'ont pas de capteur de mouvement, il n'y a donc rien à étalonner et aucun fichier d'étalonnage sur le lecteur.
Connectez le Nano via USB pour que son lecteur apparaisse, puis ouvrez le fichier device_calibration.txt. Remplacez le 0 à la toute première ligne par un 1, enregistrez le fichier et éjectez le lecteur en toute sécurité. L'étalonnage s'exécute au prochain démarrage du Nano.
Comme vous devrez tourner la carte dans plusieurs positions, il est plus facile de l'exécuter sur batterie pour qu'aucun câble ne soit en travers : réglez l'indicateur sur 1, éjectez et débranchez, puis allumez le Nano. Il commence immédiatement l'étalonnage au lieu de se préparer pour un vol, et il remet la première ligne à 0 pour vous une fois qu'il a terminé. Gyroscope d'abord, puis l'accéléromètre, et la LED vous guide à travers les deux.
Le gyroscope nécessite simplement que la carte soit complètement immobile. La LED s'illumine en rouge et vous avez quelques secondes pour vous écarter, puis elle prend ses mesures pendant environ dix à quinze secondes. Placez le Nano sur quelque chose de solide et exempt de vibrations et ne le touchez pas. Il est préférable de le faire avec le Nano dans l'orientation dans laquelle vous envisagez de voler.
S'il détecte un mouvement, il vous prévient avec une lumière orange. Si cela se produit, laissez-le finir puis relancez l'étalonnage. Lorsque le gyroscope est terminé, il clignote trois fois en vert et passe à l'accéléromètre.
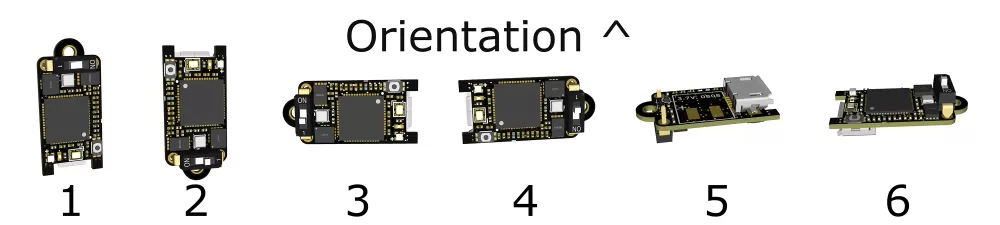
Ensuite, vous placez le Nano dans six positions, une pour chaque face, pour qu'il puisse mesurer la gravité dans toutes les directions. Il les parcourt toujours dans le même ordre, indiqué ci-dessous, vous pouvez donc simplement suivre la liste. Pour chaque position, la LED vous indique comment cela se passe :
- tant que la carte n'est pas encore alignée, la LED s'affiche en rouge ou rose
- une fois qu'elle est maintenue correctement, la LED devient d'un cyan constant et prend ses mesures, donc restez immobile
- elle clignote ensuite en vert trois fois pour confirmer que cette position est capturée, et passe à la suivante
Le rythme est donc le même à chaque fois : alignez-la jusqu'à ce que la lumière devienne cyan, restez immobile jusqu'aux clignotements verts, puis passez à la position suivante. Il n'y a pas de précipitation entre les deux.
- À plat, composants vers le haut (orientation 5)
- À plat, composants vers le bas (orientation 6)
- Sur le côté, micro-USB à droite (orientation 3)
- Sur le côté, micro-USB à gauche (orientation 4)
- Debout, micro-USB en bas (orientation 1)
- Debout, micro-USB en haut (orientation 2)
Une fois les six positions capturées, le Nano clignote en bleu cinq fois et redémarre, son lecteur disparaît et réapparaît s'il est branché. C'est tout. Les valeurs d'étalonnage sont stockées dans la mémoire propre du Nano et y restent à travers les cycles d'alimentation et les mises à jour du firmware.
Pour confirmer que cela a fonctionné, ouvrez device_information.html et vérifiez que la ligne d'étalonnage indique Calibrated, ou rouvrez device_calibration.txt, qui répertorie maintenant les décalages mesurés et a remis la première ligne à 0.
iBON À SAVOIR
Vous ne devez l'étalonner qu'une fois. Cela vaut la peine de le refaire si la carte a subi un choc dur, ou si vos données de vol commencent à afficher des lectures d'inclinaison ou d'orientation qui semblent incorrectes.