De Nano slaat alle gebruikersinstellingen op in een enkel bestand met de naam device_settings.txt, in plain-text JSON-indeling. Je bewerkt het rechtstreeks via USB, er is geen app nodig. Deze pagina behandelt de bestandsindeling, hoe je het veilig bewerkt en wat elke instelling doet. Let op dat alle hoogteverschillen en afstanden in meters, niet voeten worden gegeven.
Referentie voor firmware 1.52. Eerdere firmware kan licht verschillen; je exacte versie wordt weergegeven in device_information.html.
- Schakel de Nano uit, verbind hem vervolgens met je pc, laptop, tablet of smartphone via een USB-kabel. Hij wordt gemonteerd als het ALTCLOUD-station.
- Open
device_settings.txtin een willekeurige teksteditor. - Wijzig de gewenste waarden. Behoud de JSON-structuur, elk item heeft aanhalingstekens nodig, de dubbele punt tussen naam en waarde, en een komma erna (behalve de laatste), allemaal binnen de omringende
{ }-accolades. Tekstwaarden (de tags) blijven tussen aanhalingstekens; getallen worden zonder aanhalingstekens geschreven. - Sla het bestand op en eject het station veilig.
- Start de Nano opnieuw op (USB afsluiten en inschakelen, of uitpakken en opnieuw inplugen). Instellingen worden bij de volgende keer inschakelen gelezen en toegepast.
!BELANGRIJK
Als het bestand een JSON-fout bevat of een waarde die buiten bereik of niet ondersteund is, zal de Nano het hele bestand negeren en het opnieuw schrijven met standaardwaarden bij de volgende keer inschakelen. Als je wijzigingen dus zijn verdwenen, controleer op een typo of een waarde buiten het toegestane bereik. Laat "device": "NanoV1" altijd ongewijzigd, als het niet als NanoV1 wordt gelezen, worden geen van je instellingen toegepast.
Een nieuwe Nano wordt geleverd met deze waarden:
{
"device_tag": "MyNano",
"competitor_tag": "",
"device": "NanoV1",
"emode": 1,
"factoryreset": 0,
"hybrid_mode": 3,
"launch_detect": 30,
"launch_protection": 1500,
"led_brightness": 5,
"maintain_power": 1,
"max_samples": 24000,
"orientation": 1,
"recording_stop": 1,
"sample_ratio": 1,
"sample_speed": 100,
"startup_lock": 0,
"sync_enable": 2
}
Instellingen aangemerkt met Rev 4+ zijn afhankelijk van de IMU en gelden alleen voor revisie 4 en latere borden.
iDeze velden zijn ingebouwd in de verificatiehash
Wanneer de Nano een vlucht registreert, worden het apparaatlabel en concurrentlabel in het logboek geschreven en op dat moment in zijn SHA-256 HMAC-verificatiehash opgenomen. Hierdoor kan een opgeslagen logboek achteraf niet worden gewijzigd, niet eens deze labelsvelden, en toch een verificatiecontrole doorstaan of naar de Altimeter Cloud worden geüpload. Elk vluchtlogboek moet precies zo worden bewaard als de Nano het heeft geschreven. Het bewerken van device_settings.txt zelf is prima; het verandert alleen de waarden die voor toekomstige vluchten worden gebruikt.
device_tag Standaard "MyNano" · tekst, mag niet leeg zijn
Een etiket voor deze altimeter. Het wordt geschreven in de header van je CSV-vluchtlogboeken en, als je een logboek naar de Altimeter Cloud uploadt, ook toegepast op de vlachtpagina daar.
competitor_tag Standaard "" (leeg) · tekst, max. 32 karakters
Optioneel veld voor je FAI- of NAR-wedstrijdnummer. Opgenomen in de CSV-header en in de data-verificatiehash. Laat het leeg als je niet aan het wedstrijden bent.
device Standaard "NanoV1" · niet wijzigen
Identificeert het apparaattype en selecteert het algoritme dat wordt gebruikt om de verificatiehash in de CSV te genereren, dat de Altimeter Cloud gebruikt om te bevestigen dat een logboek echt is. Als dit niet "NanoV1" is, worden je instellingen niet toegepast.
launch_detect Standaard 30 · bereik 1 tot 199 m
Hoogte in meters boven de recente gronddruk die de altimeter moet doorbreken voordat deze een vlucht registreert. Waarden van 25 tot 50 m zijn geschikt voor de meeste toepassingen.
startup_lock Standaard 0 · bereik 0 tot 999 s
Voorkomt lanceringsdetectie tot deze veel seconden voorbij zijn sinds het inschakelen. 0 schakelt het uit. Handig als je tijd nodig hebt om de raket dicht te doen nadat je hebt ingeschakeld.
launch_protection Standaard 1500 · bereik 0 tot 10000 mG Rev 4+
Drempel voor onbedoelde lanceringsbeveiliging in milli-G. De versnelling moet deze waarde in minstens 6 van de laatste 100 monsters overschrijden voordat registratie kan beginnen, wat voorkomt dat windvlagen of het verwijderen van de neus een onechte lancering triggeren. 1500 = 1,5 G. Zet op 0 om uit te schakelen.
recording_stop Standaard 1 · 1, 2 of 3
Wanneer registratie eindigt. De Nano stopt altijd ook bij een lage batterij of wanneer deze max_samples bereikt. 1 = stop na ongeveer 9 seconden (450 monsters) stabiele hoogte; 2 = na ongeveer 18 seconden (900 monsters); 3 = stop alleen bij max_samples.
max_samples Standaard 24000 · bereik 4000 tot 24000
Het maximale aantal monsters dat wordt opgenomen voordat het logboek automatisch stopt.
sample_speed Standaard 100 · 50 of 100 (Hz)
De sensorloopfrequentie. Een hogere frequentie legt meer details vast maar verbruikt meer batterij. Bij 100 Hz met sample_ratio 1 is de maximale vluchtregistratie ongeveer 4 minuten; bij 50 Hz ongeveer 8 minuten.
Standaard is hybrid_mode ingesteld op 3, waarmee dat venster veel verder wordt uitgerekt. De klim en de momenten rond apogeum en landing worden op de volledige 100 Hz bewaard, terwijl de lange afdaling met een derde van de snelheid wordt geregistreerd. Voor een typisch geval van ongeveer 15 seconden op volledig tempo (ongeveer 1.500 monsters) en de rest van het 24.000-monsterbudget dat aan de afdaling wordt besteed op één op de drie, kunnen de standaardinstellingen een vlucht van ongeveer 11,5 minuten vastleggen, vergeleken met ongeveer 4 minuten zonder hybride modus. Een langere of kortere volledig tempo-fase verschuift dit aantal.
sample_ratio Standaard 1
Hoe vaak waarden in het logboek worden geschreven. De altimeter loopt en berekent altijd op de volledige sample_speed (50 of 100 Hz); deze instelling verandert alleen hoe vaak die huidige waarden in het vluchtlogboek worden opgeslagen. 1 = sla elk monster op, 2 = elke ander, 3 = elke derde, enzovoort, wat een eenvoudige manier is om de registratietijd te verlengen. Het logboek wordt altijd minimaal 10 Hz uitgevoerd, dus de verhouding is beperkt tot 10 wanneer sample_speed 100 is en tot 5 wanneer het 50 is; alles hoger dat je invoert wordt stilzwijgend omlaag geschroefd tot dat.
hybrid_mode Standaard 3 · 0, 3 of 5
Adaptieve steekproeven voor lange vluchten. 0 = uit (gebruik altijd sample_ratio). 3 = schakel tien seconden na apogeum naar 1-op-3-steekproef; 5 = naar 1-op-5. Onderweg, onder de 20 m boven de grond keert het terug naar volledig tempo om de landing nauwkeurig vast te leggen, en valt het vijf seconden na de landing terug op de hybride verhouding. Dit behoudt vol detail tijdens klim en landing terwijl de registratietijd over lange parachutedalingen wordt uitgerekt.
emode Standaard 1 · 1 of 2
Energiespaarstand voor langere batterijduur. 1 = normaal. 2 = maximale besparing, waarbij FIFO-batch-uitlezing met lager tempo tijdens inactief wordt gebruikt om de CPU-wakecycli te halveren. Beide modi schakelen onmiddellijk naar volledig 100 Hz-prestaties zodra een versnellingspiek of lancering wordt gedetecteerd. De stroombesparaar is afhankelijk van de IMU, dus het heeft het meeste effect op revisie 4 en latere borden.
Hoe de inactieve snelheid werkt (weergegeven op 100 Hz sample_speed)
emode 1 is inactief op 50 Hz. Een bewegingsstoot springt dit even naar 100 Hz om te controleren; zonder lancering valt het terug naar 50 Hz. Bij lancering wordt het vastgezet op 100 Hz voor de hele vlucht.
emode 2 gedraagt zich hetzelfde maar de CPU wordt alleen op 25 Hz gewekt om meer stroom te besparen. Het registreert nog steeds op de volledige 50 Hz voor lancering: elke keer dat het ontwaakt leest het elk monster uit dat is gebufferd sinds de laatste controle, dus geen gegevens gaan verloren. Het springt nog steeds direct naar 100 Hz bij lancering.
De sprong terug naar volledig tempo is erg gevoelig, dus in vrijwel al onze tests triggert de eerste stuwkracht van de ontsteker het onmiddellijk en wordt de hele motorbrand vanaf het allereerste begin vastgelegd op volledige 100 Hz. Het meeste dat je ooit op de inactieve snelheid zou registreren voordat de sprong één inactieve cyclus is: ongeveer 20 ms in emode 1 of ongeveer 40 ms in emode 2.
maintain_power Standaard 1 · 0 of 1
Wat de Nano doet na het opslaan van een vlucht. 0 = schakel de sensor en LED uit en ga in slaapstand totdat je het opnieuw opstart. 1 = blijf aan en knipperen met de geregistreerde apogeum-hoogte op de status-LED (zie hieronder), herhalen totdat je USB verbindt of opnieuw opstart. Dit bevestigt dat een vlucht is opgenomen en stelt je in staat de apogeum zonder computer te lezen.
Hoogte-flitsen lezen (indien ingesteld op 1)
De Nano knippert de apogeum-hoogte in meters één cijfer tegelijk, eerst het meest significante cijfer, met voorloopnullen overgeslagen. Elke cijferplaats heeft zijn eigen kleur:
10.000-tallen 1.000-tallen 100-tallen 10-tallen 1-tallen
- Een lange witte flits markeert het begin van de volgorde.
- Het aantal knipperen in een kleur is de waarde van dat cijfer (1 tot 9).
- Een nul-cijfer wordt weergegeven als één lange, gedimde flits van die kleur.
- Een donkerblauwe flits scheidt het ene cijfer van het volgende.
- Na het laatste cijfer is er een korte pauze, waarna het herhaalt. Verbind USB of herstart om te stoppen.
Voorbeeld, apogeum van 1.250 m: paars eenmaal, groen tweemaal, cyaan vijfmaal, dan één lange gedimde geelflits voor de nul, met een donkerblauwe flits tussen elk cijfer.
led_brightness Standaard 5 · bereik 1 tot 10
Status-LED-helderheid, wat ook een beetje stroom bespaart wanneer gedimmed. Merk op dat de schaal anders loopt dan je zou verwachten: 1 is het helderst en 10 is het dofst.
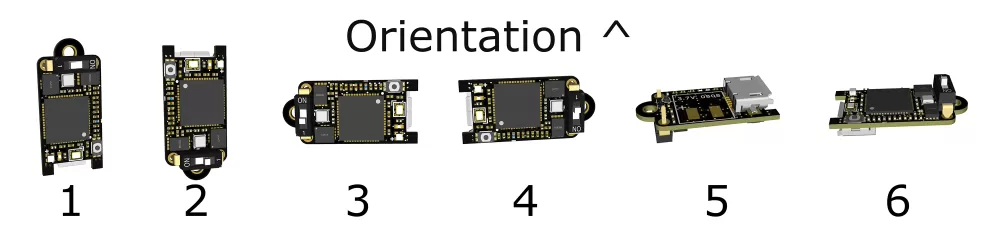
orientation Standaard 1 · 1 tot 6 Rev 4+
Vertelt de Nano hoe deze in de raket is gemonteerd zodat deze de vluchthoeken correct kan bepalen. Zet het getal om in het oriëntatieobject, waar de gemarkeerde richting (de pijl ^) naar boven naar de neus wijst:
- 1 = rechtop staand, bordkant naar je toe, micro-USB onderaan (standaard)
- 2 = rechtop staand, bordkant naar je toe, micro-USB bovenaan
- 3 = op zijn zijde, bordkant naar je toe, micro-USB naar rechts
- 4 = op zijn zijde, bordkant naar je toe, micro-USB naar links
- 5 = plat liggend, bordkant (componentkant) naar boven
- 6 = plat liggend, bordkant (componentkant) naar beneden
sync_enable Standaard 2 · 0, 1 of 2 Rev 4+
Brengt de druk- en IMU-gegevensstoelingen in lijn. Filtering zorgt ervoor dat de drukhoogte iets achter op de versnellingsmeter achterblijft; met dit ingeschakeld (2) meet de firmware die verschuiving bij lancering en verschuift de versnellingsmetergegevens zodat deze op elkaar zijn afgestemd. 0 of 1 schakelt dit uit.
factoryreset Standaard 0 · 0 of 1
Zet op 1 om het bestandssysteem opnieuw in te stellen en elke instelling terug naar de standaardinstellingen bij de volgende keer inschakelen. Het gaat daarna terug naar 0.
Elke keer dat het aanzet, leest de Nano device_settings.txt uit, past het toe en schrijft het bestand daarna terug met de waarden die het werkelijk gebruikte. Dit maakt het gemakkelijk om te bevestigen dat je bewerkingen zijn geaccepteerd:
- Sla je bewerkingen op en eject het station.
- Ontkoppel de Nano van USB en plug deze opnieuw in. Dit start het opnieuw op zodat het het bestand vers leest.
- Open opnieuw
device_settings.txt. Als je waarden nog steeds aanwezig zijn, zijn deze toegepast. Als het bestand is teruggezet naar de standaardwaarden, bevatte het een JSON-fout of een waarde buiten het toegestane bereik, dus controleer dit tegen de bereiken hierboven en probeer het opnieuw.
Voor FAI-compliance zijn verschillende waarden die oudere firmware blootlegde nu vast in firmware en kunnen niet langer worden gewijzigd. Als je een van deze sleutels aan het bestand toevoegt, worden zij eenvoudig genegeerd (en veroorzaken op zichzelf geen reset). De vaste waarden worden nog steeds in de CSV-header geschreven ter referentie:
- Referentiedruk op zeeniveau, vast op 1013,25 hPa (ISA-standaard).
- Vaste temperatuur, vast op 15 °C (ISA-standaard).
- Temperatuurgebruik, uit.
- IIR-filter, vast op 7.
- Kalman-filter, vast op 2.
- Sensoroversampling, vast per hardwarerevisie (16 op Rev 4+ met de BMP581, 8 op Rev 1 tot 3 met de BMP390).
Oudere instellingsbestanden of documentatie kunnen nog steeds sleutels als fixed_temp, sealevel, use_temperature, iirfilter of kalmanfilter vermelden, deze hebben geen enkel effect meer.