El Nano almacena toda su configuración editable por el usuario en un único archivo llamado device_settings.txt, en formato JSON de texto plano. Lo editas directamente a través de USB, no se requiere ninguna aplicación. Esta página cubre el formato del archivo, cómo editarlo de forma segura, y qué hace cada configuración. Ten en cuenta que todas las alturas y distancias se dan en metros, no en pies.
Referencia para firmware 1.52. El firmware anterior puede diferir ligeramente; tu versión exacta se muestra en device_information.html.
- Con el interruptor de encendido del Nano apagado, conéctalo a tu PC, portátil, tableta o smartphone con un cable USB. Se monta como la unidad ALTCLOUD.
- Abre
device_settings.txten cualquier editor de texto plano. - Cambia los valores que desees. Mantén la estructura JSON intacta, cada entrada necesita sus comillas, los dos puntos entre nombre y valor, y una coma después (excepto la última), todo dentro de las llaves
{ }que la rodean. Los valores de texto (las etiquetas) permanecen entre comillas; los números se escriben sin comillas. - Guarda el archivo, luego expulsa la unidad de forma segura.
- Reinicia el Nano (desconecta USB y enciéndelo, o desconecta y vuelve a conectar). La configuración se lee y se aplica al siguiente encendido.
!IMPORTANTE
Si el archivo contiene algún error JSON, o un valor que está fuera de rango o no es compatible, el Nano descarta el archivo completo y lo reescribe con los valores predeterminados al siguiente encendido. Entonces, si tus cambios parecen haber desaparecido, busca un error de tipografía o un valor fuera del rango permitido. Siempre deja "device": "NanoV1" sin cambios; si no dice NanoV1, ninguna de tus configuraciones se aplica.
Un Nano nuevo viene con estos valores:
{
"device_tag": "MyNano",
"competitor_tag": "",
"device": "NanoV1",
"emode": 1,
"factoryreset": 0,
"hybrid_mode": 3,
"launch_detect": 30,
"launch_protection": 1500,
"led_brightness": 5,
"maintain_power": 1,
"max_samples": 24000,
"orientation": 1,
"recording_stop": 1,
"sample_ratio": 1,
"sample_speed": 100,
"startup_lock": 0,
"sync_enable": 2
}
La configuración marcada Rev 4+ depende del IMU y solo se aplica a las placas Revision 4 y posteriores.
iEstos campos se integran en el hash de verificación
Cuando el Nano registra un vuelo, la etiqueta del dispositivo y la etiqueta del competidor se escriben en el registro y se incluyen en su hash HMAC SHA-256 de verificación en ese momento. Por esto, un registro guardado no puede modificarse después, ni siquiera estos campos de etiqueta, y aún así pasar una verificación o ser cargado a Altimeter Cloud. Cada registro de vuelo debe mantenerse exactamente como lo escribió el Nano. Editar device_settings.txt es correcto; solo cambia los valores utilizados para vuelos futuros.
device_tag Predeterminado "MyNano" · texto, no puede estar vacío
Una etiqueta para este altímetro. Se escribe en el encabezado de tus registros de vuelo CSV y, si cargas un registro a Altimeter Cloud, se aplica a la página de vuelo allí también.
competitor_tag Predeterminado "" (vacío) · texto, hasta 32 caracteres
Campo opcional para tu número de competencia FAI o NAR. Se incluye en el encabezado CSV y en el hash de verificación de datos. Déjalo vacío si no estás compitiendo.
device Predeterminado "NanoV1" · no cambiar
Identifica el tipo de dispositivo y selecciona el algoritmo utilizado para generar el hash de verificación en el CSV, que Altimeter Cloud utiliza para confirmar que un registro es genuino. Si esto no es "NanoV1", tu configuración no se aplicará.
launch_detect Predeterminado 30 · rango 1 a 199 m
Altura en metros por encima de la presión de nivel del suelo reciente que el altímetro debe atravesar antes de empezar a grabar un vuelo. Valores de 25 a 50 m son adecuados para la mayoría de usos.
startup_lock Predeterminado 0 · rango 0 a 999 s
Previene la detección de lanzamiento hasta que hayan pasado estos segundos desde el encendido. 0 lo desactiva. Útil si necesitas tiempo para cerrar el cohete después de encender.
launch_protection Predeterminado 1500 · rango 0 a 10000 mG Rev 4+
Umbral de protección contra lanzamiento accidental en mili-G. La aceleración debe exceder este valor en al menos 6 de las últimas 100 muestras antes de que la grabación pueda comenzar, lo que evita que ráfagas de viento o la extracción de la cofia causen un falso lanzamiento. 1500 = 1.5 G. Establece en 0 para desactivar.
recording_stop Predeterminado 1 · 1, 2 o 3
Cuándo termina la grabación. El Nano siempre también se detiene en batería baja o cuando alcanza max_samples. 1 = detener después de aproximadamente 9 segundos (450 muestras) de altitud estable; 2 = después de aproximadamente 18 segundos (900 muestras); 3 = solo detener en max_samples.
max_samples Predeterminado 24000 · rango 4000 a 24000
El número máximo de muestras grabadas antes de que el registro se detenga automáticamente.
sample_speed Predeterminado 100 · 50 o 100 (Hz)
La velocidad del bucle de sensores. Una velocidad más alta captura más detalle pero usa más batería. A 100 Hz con sample_ratio 1 la grabación máxima de vuelo es de aproximadamente 4 minutos; a 50 Hz es de aproximadamente 8 minutos.
Por defecto hybrid_mode está establecido en 3, lo que extiende mucho esa ventana. La subida y los momentos alrededor del apogeo y el aterrizaje se mantienen a los 100 Hz completos, mientras que el largo descenso se registra a un tercio de la velocidad. Tomando un caso típico de aproximadamente 15 segundos a velocidad completa (aproximadamente 1.500 muestras) y el resto del presupuesto de 24.000 muestras gastado en el descenso a uno de cada tres, la configuración predeterminada puede capturar un vuelo que dura hasta aproximadamente 11,5 minutos, en comparación con aproximadamente 4 minutos sin modo híbrido. Una fase de velocidad completa más larga o más corta cambiará esta cifra.
sample_ratio Predeterminado 1
Con qué frecuencia se escriben las lecturas en el registro. El altímetro siempre funciona y calcula a la velocidad de muestra completa (50 o 100 Hz); esta configuración solo cambia con qué frecuencia esos valores actuales se guardan en el registro de vuelo. 1 = guardar cada muestra, 2 = cada otra, 3 = cada tercera, y así sucesivamente, que es una forma simple de extender el tiempo de grabación. El registro siempre funciona a un mínimo de 10 Hz, por lo que la relación se limita a 10 cuando sample_speed es 100 y a 5 cuando es 50; cualquier cosa más alta que ingreses se reduce silenciosamente a esa.
hybrid_mode Predeterminado 3 · 0, 3 o 5
Muestreo adaptativo para vuelos largos. 0 = desactivado (siempre usar sample_ratio). 3 = reducir al muestreo de 1-en-3 diez segundos después del apogeo; 5 = reducir a 1-en-5. En el camino hacia abajo, por debajo de 20 m sobre el suelo vuelve a la velocidad completa para capturar el aterrizaje con precisión, luego vuelve a la relación híbrida cinco segundos después del toque. Esto mantiene todo detalle durante el ascenso y el aterrizaje mientras se extiende el tiempo de grabación sobre largos descensos en paracaídas.
emode Predeterminado 1 · 1 o 2
Nivel de ahorro de energía para mayor duración de la batería. 1 = normal. 2 = ahorro máximo, usando lectura por lotes FIFO de velocidad más baja mientras está inactivo para reducir a la mitad los ciclos de vigilia de la CPU. Ambos modos cambian instantáneamente al rendimiento completo de 100 Hz en el momento en que se detecta una ráfaga de aceleración o un lanzamiento. El ahorro de energía depende del IMU, por lo que tiene más efecto en placas Revision 4 y posteriores.
Cómo funciona la velocidad inactiva (mostrada a 100 Hz sample_speed)
emode 1 inactivo a 50 Hz. Un bache de movimiento salta brevemente a 100 Hz para verificar; sin lanzamiento vuelve a 50 Hz. Al lanzamiento se bloquea a 100 Hz para todo el vuelo.
emode 2 se comporta igual pero la CPU solo se despierta a 25 Hz para ahorrar más energía. Aún registra a los 50 Hz completos antes del lanzamiento: cada vez que se despierta lee cada muestra almacenada en búfer desde la última verificación, por lo que no se pierden datos. Aún salta directamente a 100 Hz al lanzamiento.
El salto de vuelta a velocidad completa es muy sensible, así que en casi todas nuestras pruebas el empuje inicial del ignitador lo activa instantáneamente y toda la quema del motor se captura a los 100 Hz completos desde el principio. Lo máximo que jamás grabarías a la velocidad inactiva antes del salto es un ciclo inactivo: aproximadamente 20 ms en emode 1, o aproximadamente 40 ms en emode 2.
maintain_power Predeterminado 1 · 0 o 1
Qué hace el Nano después de guardar un vuelo. 0 = apagar el sensor y el LED y dormir hasta que reinicies. 1 = mantenerse encendido e parpadear la altitud de apogeo grabada en el LED de estado (ver abajo), repitiéndose hasta que conectes USB o reinicies. Esto tanto confirma que se grabó un vuelo como te permite leer el apogeo sin una computadora.
Leer los parpadeos de altitud (cuando se establece en 1)
El Nano parpadea la altura del apogeo en metros un dígito a la vez, dígito más significativo primero, omitiendo los ceros a la izquierda. Cada lugar de dígito tiene su propio color:
Decenas de miles Miles Centenas Decenas Unidades
- Un destello blanco prolongado marca el inicio de la secuencia.
- El número de parpadeos en un color es el valor de ese dígito (1 a 9).
- Un dígito de cero se muestra como un destello prolongado y tenue de ese color.
- Un destello azul oscuro separa un dígito del siguiente.
- Después del último dígito hay una pausa breve, luego se repite. Conecta USB o reinicia para detener.
Ejemplo, un apogeo de 1.250 m: púrpura una vez, verde dos veces, cian cinco veces, luego un destello prolongado y tenue amarillo para el cero, con un destello azul oscuro entre cada dígito.
led_brightness Predeterminado 5 · rango 1 a 10
Brillo del LED de estado, que también ahorra un poco de energía cuando está atenuado. Ten en cuenta que la escala funciona al revés de lo que podrías esperar: 1 es el más brillante y 10 es el más tenue.
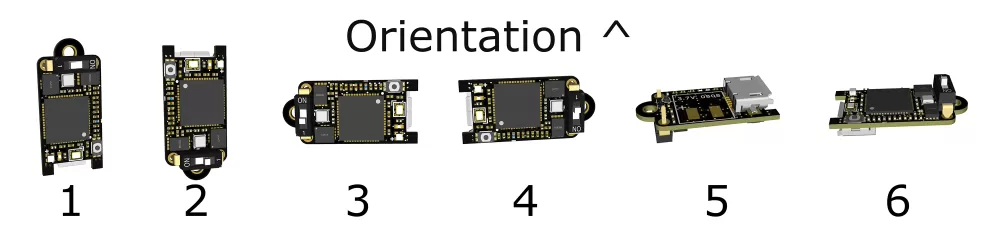
orientation Predeterminado 1 · 1 a 6 Rev 4+
Le dice al Nano cómo está montado en el cohete para que pueda calcular correctamente los ángulos de vuelo. Coincide el número con el diagrama de orientación, donde la dirección marcada (la flecha ^) apunta hacia arriba hacia la cofia:
- 1 = de pie, cara de la placa hacia ti, micro-USB en la parte inferior (predeterminado)
- 2 = de pie, cara de la placa hacia ti, micro-USB en la parte superior
- 3 = de lado, cara de la placa hacia ti, micro-USB a la derecha
- 4 = de lado, cara de la placa hacia ti, micro-USB a la izquierda
- 5 = acostado, cara de la placa (lado de componentes) hacia arriba
- 6 = acostado, cara de la placa (lado de componentes) hacia abajo
sync_enable Predeterminado 2 · 0, 1 o 2 Rev 4+
Alinea los flujos de datos de presión e IMU. El filtrado hace que la altitud de presión se retrase ligeramente detrás del acelerómetro; con esto habilitado (2) el firmware mide ese desplazamiento al lanzamiento y desplaza los datos del acelerómetro para que se alineen. 0 o 1 lo desactiva.
factoryreset Predeterminado 0 · 0 o 1
Establece en 1 para reformatear el sistema de archivos y reescribir cada configuración a su valor predeterminado al siguiente encendido. Vuelve a 0 después.
Cada vez que se enciende, el Nano lee device_settings.txt, la aplica, y luego reescribe el archivo con los valores que realmente utilizó. Eso facilita confirmar que tus ediciones fueron aceptadas:
- Guarda tus ediciones y expulsa la unidad.
- Desconecta el Nano de USB y vuelve a conectarlo. Esto lo reinicia para que lea el archivo nuevamente.
- Reabre
device_settings.txt. Si tus valores siguen ahí, han sido aplicados. Si el archivo ha vuelto a los valores predeterminados, contenía un error JSON o un valor fuera del rango permitido, así que verifica contra los rangos anteriores e intenta de nuevo.
Por cumplimiento de FAI, varios valores que el firmware anterior exponía ahora están fijos en el firmware y no pueden cambiarse. Si añades cualquiera de estas claves al archivo simplemente se ignoran (y no causarán, por sí solos, un reinicio). Los valores fijos aún se escriben en el encabezado CSV como referencia:
- Presión de referencia a nivel del mar, fija en 1013.25 hPa (estándar ISA).
- Temperatura fija, fija en 15 °C (estándar ISA).
- Uso de temperatura, desactivado.
- Filtro IIR, fijo en 7.
- Filtro Kalman, fijo en 2.
- Sobremuestreo del sensor, fijo por revisión de hardware (16 en Rev 4+ con el BMP581, 8 en Rev 1 a 3 con el BMP390).
Los archivos de configuración más antiguos o la documentación aún pueden enumerar claves como fixed_temp, sealevel, use_temperature, iirfilter o kalmanfilter, estos ya no tienen efecto alguno.